一种用于agv的移动导向系统
技术领域
1.本实用新型涉及导向装置技术领域,具体讲的是一种用于agv的移动导向系统。
背景技术:
2.在物流运输、仓储等过程中,产品往往需要经过多次转运,而产品转运时经常用到的便是agv。agv(automated guided vehicles)又名无人搬运车,自动导航车,激光导航车,是指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车,其显著特点的是无人驾驶,可以保障系统在不需要人工引航的情况下就能够沿预定的路线自动行驶,将货物或物料自动从起始点运送到目的地。agv的行驶路径可以根据仓储货位要求、生产工艺流程等改变而灵活改变,并且一般配备有装卸机构,可以与其他物流设备自动接口,实现货物和物料装卸与搬运全过程自动化,因此广泛应用于各种仓储物流中。
3.agv的导向方式通常是通过磁条识别器识别地面上的磁条,以此来使agv沿磁条轨迹移动,无需人工引导。但是,在agv行驶的过程中,如若发生意外(例如磁条轨迹上有异物掉落),就可能会导致agv的行驶方向出现偏差,如果行驶速度过快,很容易使磁条识别器脱离识别磁条的范围,从而导致运输中断,影响运输效率,需要工人从新调整agv的位置,费时费力。
技术实现要素:
4.本实用新型要解决的技术问题是:克服以上现有技术的缺陷,提供一种在行驶过程中能够及时调整行驶方向、避免偏移行驶路径的agv移动导向系统。
5.本实用新型的技术解决方案是,提供一种具有以下结构的用于agv的移动导向系统:包括安装于agv架体上的磁条识别器、plc控制器和驱动组件;所述磁条识别器、驱动组件均与plc控制器电性连接;所述磁条识别器为两对,其中一对磁条识别器沿agv架体的前后方向间隔分布,另一对磁条识别器沿agv架体的左右方向间隔分布,且每对磁条识别器之间的间隔尺寸均大于铺设在地面上的磁条的宽度尺寸;所述磁条识别器用于识别铺设在地面上的磁条,并将接收到的信号传输至plc控制器,所述plc控制器根据接收到的信号控制驱动组件,并通过驱动组件及时调整车轮的前进方向。
6.采用以上结构后,本实用新型一种用于agv的移动导向系统与现有技术相比,具有以下优点:
7.在agv架体上设置两对磁条识别器,其中沿agv架体左右方向间隔分布的一对磁条识别器可以识别沿agv架体前后方向延伸的磁条路径,沿agv架体前后方向间隔分布的一对磁条识别器可以识别沿agv架体左右方向延伸的磁条路径。在agv行驶的过程中会有相应的一对磁条识别器识别磁条路径,当agv行驶到磁条路径的转折点处时,只需将车轮转向90度,切换另一对磁条识别器识别磁条路径即可,agv架体无需跟着转向,避免agv架体上的物品掉落。另外,每对磁条识别器的间隔尺寸大于磁条的宽度尺寸,这样可以在agv偏移磁条
路径的时候及时调整方向,避免agv脱离磁条路径,保障运输效率。
8.作为优选,所述agv架体上还设有至少一个rfid阅读器,所述rfid阅读器与plc控制器电性连接;所述rfid阅读器用于接收rfid射频识别标签中的信号,并将接收到的信号传输至plc控制器,所述plc控制器根据接收到的信号控制驱动组件作出rfid射频识别标签中发出的指令。磁条路径上设有rfid射频识别标签,通过rfid阅读器可以识别出rfid射频识别标签中发出的指令,并通过plc控制器控制驱动组件,例如通过驱动组件控制车轮的转动、停止及转向。
9.作为优选,所述rfid阅读器为四个,其中两个设置在agv架体底部的中间位置,另外两个分别设置在agv架体底部的左右两侧。这样可以使agv在向左或向右转向后,agv架体底部的两侧的rfid阅读器能够及时识别磁条路径上的rfid射频识别标签。
10.作为优选,所述驱动组件包括驱动电机、转向电机和车轮架,所述驱动电机、转向电机均与plc控制器电性连接;所述车轮安装在车轮架上,所述车轮架连接在agv架体上,且车轮架可周向转动;所述驱动电机安装在车轮架上,并与车轮传动连接,用于驱动车轮转动;所述转向电机安装在agv架体上,并与车轮架传动连接,用于驱动车轮架及车轮转向。
11.作为优选,所述转向电机为步进电机,所述步进电机的输出轴上连接有主动齿轮,所述车轮架上连接有从动齿轮,所述主动齿轮与从动齿轮啮合传动。
12.作为优选,所述驱动组件为三个,且同步驱动对应的车轮。
附图说明
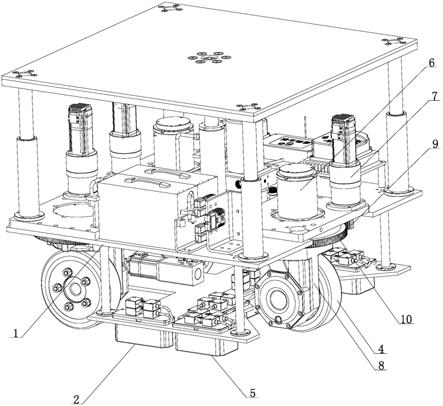
13.图1为本实用新型的结构示意图。
14.图2为本实用新型另一视图方向的结构示意图。
15.图3为本实用新型仰视方向的结构示意图。
16.附图标记说明:
17.1、agv架体,2、磁条识别器,3、驱动组件,4、车轮,5、rfid阅读器,6、驱动电机,7、转向电机,8、车轮架,9、主动齿轮,10、从动齿轮。
具体实施方式
18.下面结合附图和具体实施例对本实用新型作进一步详细说明。
19.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制,同时术语“第一”、“第二”等只是为了区分各部件的名称,并没有主次关系,因此不能理解为对本实用新型的限制。
20.如图1、图2和图3所示;
21.本实用新型公开了一种用于agv的移动导向系统:包括安装于agv架体1上的磁条识别器2、plc控制器和驱动组件3;磁条识别器2、驱动组件3均与plc控制器导线连接。磁条识别器2为两对,其中一对磁条识别器2沿agv架体1的前后方向间隔分布,另一对磁条识别器2沿agv架体1的左右方向间隔分布,且每对磁条识别器2之间的间隔尺寸均大于铺设在地
面上的磁条的宽度尺寸;磁条识别器2用于识别铺设在地面上的磁条,并将接收到的信号传输至plc控制器,plc控制器根据接收到的信号控制驱动组件3,并通过驱动组件3及时调整车轮4的前进方向,避免偏离地面上的磁条路径。
22.agv架体1上还设有四个rfid阅读器5,四个rfid阅读器5均与plc控制器导线连接。磁条路径上设有rfid射频识别标签,rfid阅读器5用于接收rfid射频识别标签中的信号,并将接收到的信号传输至plc控制器,plc控制器根据接收到的信号控制驱动组件3作出rfid射频识别标签中的指令,例如通过驱动组件3控制车轮4的转动、停止及转向。四个rfid阅读器5中的两个设置在agv架体1底部的中间位置,另外两个分别设置在agv架体1底部的左右两侧,这样可以使agv在向左或向右转向后,agv架体1底部的两侧的rfid阅读器5能够及时识别磁条路径上的rfid射频识别标签。
23.agv行驶的行驶路径是直线的,因此磁条路径的转折点处为90度直角;在agv架体1上设置两对磁条识别器2,其中沿agv架体1左右方向间隔分布的一对磁条识别器2可以识别沿agv架体1前后方向延伸的磁条路径,沿agv架体1前后方向间隔分布的一对磁条识别器2可以识别沿agv架体1左右方向延伸的磁条路径。在agv行驶的过程中会有相应的一对磁条识别器2识别磁条路径,当agv行驶到磁条路径的转折点处时,只需将车轮4转向90度,切换另一对磁条识别器2识别磁条路径即可,agv架体1无需跟着转向,避免agv架体1上的物品掉落。另外,每对磁条识别器2的间隔尺寸大于磁条的宽度尺寸,这样可以在agv偏移磁条路径的时候及时调整方向,避免agv脱离磁条路径,保障运输效率。磁条路径上设有rfid射频识别标签,rfid阅读器5可以根据接收到的信号作出下一步指令,例如通过驱动组件3控制车轮4的转动、停止及转向。
24.驱动组件3包括驱动电机6、转向电机7和车轮架8,驱动电机6、转向电机7均与plc控制器导线连接。车轮4安装在车轮架8上,车轮架8连接在agv架体1上,且车轮架8可周向转动。驱动电机6安装在车轮架8上,并与车轮4通过皮带或齿轮传动连接,用于驱动车轮4转动。转向电机7安装在agv架体1上,并与车轮架8传动连接,用于驱动车轮架8及车轮4转向。转向电机7为步进电机,步进电机的输出轴上连接有主动齿轮9,车轮架8上连接有从动齿轮10,主动齿轮9与从动齿轮10啮合传动。agv架体1上的驱动组件3为三个,且同步驱动对应的车轮4。
25.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内,因此,本实用新型的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。