1.本实用新型涉及教学机器人技术领域,更具体的说,尤其涉及一种人工智能化教学机器人模型结构。
背景技术:
2.随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究也越来越多,尤其是在教育行业,利用其肢体的互动配合声音的展示可以很大程度上提升学生们的学习兴趣。
3.但是目前常见教学机器人的肢体结构较为简单,缺少对装置进行防护的机构,尤其是对于年龄较小的学生进行使用时,很容易让装置发生滑落,以造成装置外表甚至内部的损坏,影响装置的正常使用。
4.有鉴于此,针对现有的问题予以研究改良,提供一种人工智能化教学机器人模型结构,旨在通过该技术,达到解决问题与提高实用价值性的目的。
技术实现要素:
5.本实用新型的目的在于提供一种人工智能化教学机器人模型结构,以解决上述背景技术中提出的目前常见教学机器人的肢体结构较为简单,缺少对装置进行防护的机构,尤其是对于年龄较小的学生进行使用时,很容易让装置发生滑落,以造成装置外表甚至内部的损坏,影响装置正常使用的问题和不足。
6.为实现上述目的,本实用新型提供了一种人工智能化教学机器人模型结构,由以下具体技术手段所达成:
7.一种人工智能化教学机器人模型结构,包括:筒体、限位槽、限位筒、封板、安装孔、固定块、紧固螺钉、防护板、压缩弹簧、维护孔、内筒、法兰板、金属弹片;所述限位槽位于筒体的内部,且限位槽与筒体为一体式结构;所述限位筒设置在限位槽的内部,且限位筒与限位槽之间滑动连接;所述封板设置在限位筒的下侧,且封板与限位筒通过焊接方式相连接;所述安装孔分别位于限位筒左右两侧的上下两方,且安装孔与限位筒为一体式结构;所述固定块设置在限位筒的内部,且固定块与限位筒之间滑动连接;所述紧固螺钉分别设置在固定块内下方的左右两侧,且紧固螺钉与固定块之间拧接;所述防护板设置在固定块的上侧,且防护板与固定块通过焊接方式相连接;所述压缩弹簧设置在封板的下侧,且压缩弹簧与封板通过焊接方式相连接;所述维护孔呈圆周排列的方式在筒体的内部设有六处,且维护孔与筒体为一体式结构;所述内筒设置在筒体的内部,且内筒与筒体之间套接;所述法兰板分别设置在筒体和内筒的左右两侧,且法兰板分别与筒体和内筒通过螺栓固定方式相连接;所述金属弹片分别设置在防护板下侧的左右两方,且金属弹片与防护板通过螺栓固定方式相连接。
8.作为本技术方案的进一步优化,本实用新型一种人工智能化教学机器人模型结构所述限位槽为阶梯状的矩形孔,且限位槽呈圆周排列和线性排列的方式设有多处,并且限
位槽与封板之间滑动连接。
9.作为本技术方案的进一步优化,本实用新型一种人工智能化教学机器人模型结构所述安装孔为圆形的通孔,且位于限位筒上方的两处安装孔与紧固螺钉之间滑动连接,位于限位筒下方的两处安装孔与维护孔相重合。
10.作为本技术方案的进一步优化,本实用新型一种人工智能化教学机器人模型结构所述固定块为长方形的块体结构,且固定块内的下方设有一处螺纹孔。
11.作为本技术方案的进一步优化,本实用新型一种人工智能化教学机器人模型结构所述防护板为弧形的板状结构。
12.作为本技术方案的进一步优化,本实用新型一种人工智能化教学机器人模型结构所述内筒为圆管状结构,且内筒的外侧呈线性排列方式设有多处六棱柱状结构。
13.由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:
14.1、本实用新型一种人工智能化教学机器人模型结构,通过在限位槽的内部设置防护板、限位筒和封板,并在封板的下侧设置压缩弹簧,可以在装置滑落时吸收地面对装置的冲击,从而使该装置起到减震防摔的作用。
15.2、本实用新型一种人工智能化教学机器人模型结构,通过在防护板的下侧设置金属弹片,不但可以加强装置的减震效果,还可以利用其与筒体外侧的配合使防护板更加平稳的连接,从而使该装置起到结构平稳的作用。
16.3、本实用新型一种人工智能化教学机器人模型结构,通过在筒体的内部设置维护孔,当向下压动防护板时,可以让紧固螺钉与维护孔相重合,以便于对防护板进行维修或更换,从而使该装置起到维护方便的作用。
17.4、本实用新型通过对上述装置在结构上的改进,具有减震防摔,结构平稳以及维护方便的优点,从而有效的解决了现有装置中出现的问题和不足。
附图说明
18.构成本技术的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
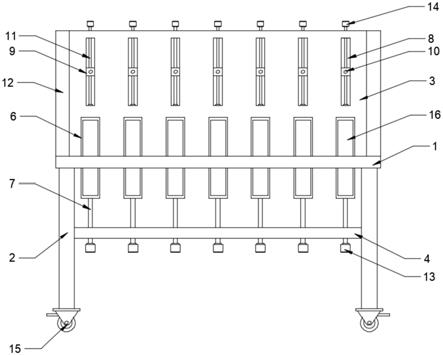
19.图1为本实用新型的内部结构示意图;
20.图2为本实用新型的外观结构示意图;
21.图3为本实用新型筒体和内筒结构示意图;
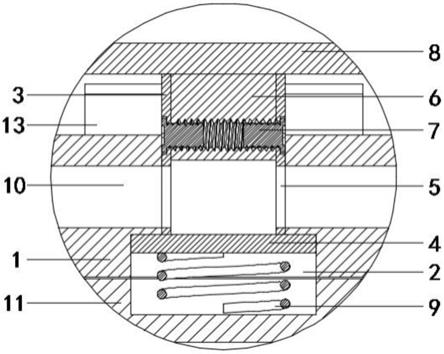
22.图4为本实用新型限位筒连接处分解结构示意图;
23.图5为本实用新型防护板下侧结构示意图;
24.图6为本实用新型法兰板处分解结构示意图。
25.图中:筒体1、限位槽2、限位筒3、封板4、安装孔5、固定块6、紧固螺钉7、防护板8、压缩弹簧9、维护孔10、内筒11、法兰板12、金属弹片13。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的
实施例。
27.需要说明的是,在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
28.此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
29.同时,在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电性连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
30.请参见图1至图6,本实用新型提供一种人工智能化教学机器人模型结构的具体技术实施方案:
31.一种人工智能化教学机器人模型结构,包括:筒体1、限位槽2、限位筒3、封板4、安装孔5、固定块6、紧固螺钉7、防护板8、压缩弹簧9、维护孔10、内筒11、法兰板12、金属弹片13;限位槽2位于筒体1的内部,且限位槽2与筒体1为一体式结构;限位筒3设置在限位槽2的内部,且限位筒3与限位槽2之间滑动连接;封板4设置在限位筒3的下侧,且封板4与限位筒3通过焊接方式相连接;安装孔5分别位于限位筒3左右两侧的上下两方,且安装孔5与限位筒3为一体式结构;固定块6设置在限位筒3的内部,且固定块6与限位筒3之间滑动连接;紧固螺钉7分别设置在固定块6内下方的左右两侧,且紧固螺钉7与固定块6之间拧接;防护板8设置在固定块6的上侧,且防护板8与固定块6通过焊接方式相连接;压缩弹簧9设置在封板4的下侧,且压缩弹簧9与封板4通过焊接方式相连接;维护孔10呈圆周排列的方式在筒体1的内部设有六处,且维护孔10与筒体1为一体式结构;内筒11设置在筒体1的内部,且内筒11与筒体1之间套接;法兰板12分别设置在筒体1和内筒11的左右两侧,且法兰板12分别与筒体1和内筒11通过螺栓固定方式相连接;金属弹片13分别设置在防护板8下侧的左右两方,且金属弹片13与防护板8通过螺栓固定方式相连接。
32.具体的,限位槽2为阶梯状的矩形孔,且限位槽2呈圆周排列和线性排列的方式设有多处,并且限位槽2与封板4之间滑动连接。
33.具体的,安装孔5为圆形的通孔,且位于限位筒3上方的两处安装孔5与紧固螺钉7之间滑动连接,位于限位筒3下方的两处安装孔5与维护孔10相重合。
34.具体的,固定块6为长方形的块体结构,且固定块6内的下方设有一处螺纹孔。
35.具体的,防护板8为弧形的板状结构。
36.具体的,内筒11为圆管状结构,且内筒11的外侧呈线性排列方式设有多处六棱柱状结构。
37.具体实施步骤:
38.在使用该装置时,利用两端的法兰板12将该装置与转向机构相连接,并将线路穿过内筒11的内部即可,使用期间,通过压缩弹簧9和金属弹片13对封板4、限位筒3和防护板8的反弹,可以增强对装置的保护,同时通过在筒体1的内部设置维护孔10,当下压防护板8
时,可以将固定螺钉7与维护孔10相重合,以便进行防护板8的维护。
39.综上所述:该一种人工智能化教学机器人模型结构,通过在限位槽的内部设置防护板、限位筒和封板,并在封板的下侧设置压缩弹簧,可以在装置滑落时吸收地面对装置的冲击,从而使该装置起到减震防摔的作用;通过在防护板的下侧设置金属弹片,不但可以加强装置的减震效果,还可以利用其与筒体外侧的配合使防护板更加平稳的连接,从而使该装置起到结构平稳的作用;通过在筒体的内部设置维护孔,当向下压动防护板时,可以让紧固螺钉与维护孔相重合,以便于对防护板进行维修或更换,从而使该装置起到维护方便的作用,有效解决了现有装置中出现的问题和不足。
40.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。