1.本发明涉及一种用于车辆的制动系统的控制单元、一种用于车辆的制动系统的制动力放大器和一种用于车辆的制动系统。本发明同样涉及一种用于运行车辆的制动系统的方法。
背景技术:
2.由现有技术已知制动系统,在所述制动系统中,装备有相应的制动系统的车辆的驾驶员可以借助对车辆的制动操纵元件/制动踏板的操纵通过相应的制动系统的主制动缸制动到至少一个液压地连接在主制动缸上的车轮制动缸中,其中,驾驶员同时借助相应的制动系统的制动力放大器在力方面受到支持。这种制动系统例如在de 10 2010 001 939 a1中公开。
技术实现要素:
3.本发明创造了:带有权利要求1的特征的、用于车辆的制动系统的控制单元;带有权利要求8的特征的、用于车辆的制动系统的制动力放大器;带有权利要求9的特征的、用于车辆的制动系统;和带有权利要求10的特征的、用于运行车辆的制动系统的方法。
4.本发明通过必要时快速地将制动液输送到至少一个车轮制动缸中而创造了有利的可能性来对这样的状况作出反应,在所述状况中,车辆/机动车的制动系统的主制动缸的能调整的活塞借助施加到车辆/机动车的制动操纵元件上的驾驶员制动力和/或借助制动系统的制动力放大器的放大器力从其起始位置调整了等于预定的极限制动行程的制动行程地进入主制动缸。主制动缸的能调整的活塞的极限制动行程可以尤其指的是能调整的活塞的最大可能的制动行程。本发明因此特别适用于这样一些状况,在这些状况中,不再能进一步制动进入主制动缸,因为主制动缸的能调整的活塞的制动行程已经等于预定的极限制动行程/最大可能的制动行程。但即使不再能进一步制动进入主制动缸,本发明仍负责将制动液输送到制动系统的至少一个车轮制动缸中,并且以这种方式保证了对相应的车辆/机动车的可靠的制动。
5.本发明因此使得在主制动缸中提供“储备体积”变得多余,储备体积按照传统应当保证主制动缸的能调整的活塞的制动行程不/几乎不等于预定的极限制动行程/最大可能的制动行程。本发明因此可以用于减小主制动缸长度,这就是说,减小主制动缸沿着其能调整的活塞的调整方向的最大的伸展长度。在利用本发明时所使用的主制动缸因此可以具有比传统的/按标准的主制动缸更小的主制动缸长度。与主制动缸配合作用的制动力放大器沿着主制动缸的能调整的活塞的调整方向也可以相应地构造得较短,因而制动力放大器能更为方便地安装在车辆/机动车处,制动力放大器无需(远远)伸入到车辆乘坐空间中。本发明因此也能用于降低驾驶员在驾驶员的车辆/机动车发生事故的情况下受伤的风险。
6.要明确指出的是,本发明不需要针对在主制动缸中存在的主制动缸压力的当前的测量值并且因此也不需要预压传感器来识别/估计,主制动缸的能调整的活塞的制动行程
是否等于预定的极限制动行程。本发明因此可能有助于取消为利用本发明的制动系统装备预压传感器。
7.人们也可以将本发明的有利的作用称为mvr功能(master cylinder volume replacement)。
8.在一种有利的实施方式中,控制单元设计用于,至少借助由构造成机电的制动力放大器的制动力放大器的电动马达的旋转传感器或马达电流传感器提供的关于放大器力传递部件的调整行程的传感器信号来识别或估计,主制动缸的能调整的活塞的制动行程是否等于预定的极限制动行程。控制单元的在此所说明的实施方式因此可以与已经经常使用的、较为利于成本的并且需要较少结构空间的传感器类型配合作用。
9.控制单元也有利地设计用于,在额外考虑到构造成机电的制动力放大器的制动力放大器的行程差传感器的行程差信号的情况下识别或估计,主制动缸的能调整的活塞的制动行程是否等于预定的极限制动行程。因此控制单元的在此所说明的实施方式也可以与向来已经使用的行程差传感器配合作用。
10.控制单元也可以备选或补充性地设计用于,在额外考虑到在构造成输入杆的驾驶员制动力传递部件处的杆行程传感器的杆行程信号的情况下识别或估计,主制动缸的能调整的活塞的制动行程是否等于预定的极限制动行程。杆行程传感器能较为利于成本地制造并且需要较少的结构空间。因此在此所说明的控制单元也适合使用有利的传感器类型。
11.在另一种有利的实施方式中,倘若控制单元识别或估计到,主制动缸的能调整的活塞的制动行程等于预定的极限制动行程,那么控制单元额外设计用于,至少借助所提供的传感器信号、行程差信号和/或杆行程信号确定关于从制动液贮存器有待输送到至少一个车轮制动缸中的额定体积流量的额定参量,并且借助至少一个控制信号这样来激活泵控制机构,使得对应所述额定参量的实际体积流量可以借助至少一个由泵控制机构驱控的液压泵从制动液贮存器输送到至少一个车轮制动缸中。控制单元的在此所说明的实施方式因此可以额外通知所述泵控制机构,额外的体积以何种程度从制动液贮存器输送到至少一个车轮制动缸中。
12.控制单元优选额外设计用于,至少借助所提供的传感器信号、行程差信号和/或杆行程信号确定了关于借助制动力放大器有待实施的额定放大器力的额定放大器参量,并且借助至少一个放大器控制信号这样来驱控制动力放大器,使得制动力放大器通过放大器力传递部件提供了对应额定放大器参量的放大器力。控制单元的在此所说明的实施方式因此可以特别是用作制动力放大器-控制单元,因而取消了为制动力放大器装备(额外的)自己的控制机构的传统的必要性。
13.作为有利的扩展设计方案,控制单元可以额外设计用于,倘若控制单元识别或估计到,主制动缸的能调整的活塞的制动行程低于预定的极限制动行程,那么按照预定的第一特征线确定额定放大器参量,并且倘若控制单元识别或估计到,主制动缸的能调整的活塞的制动行程等于预定的极限制动行程,那么按照预定的第二特征线确定额定放大器参量。如下文中更为准确地阐释的那样,控制单元在这种情况下可以也在主制动缸的能调整的活塞的制动行程等于预定的极限制动行程/最大可能的制动行程时改进操纵制动操纵元件的驾驶员的制动操纵感觉/踏板感觉。
14.前述优点也在一种用于车辆的带有相应的控制单元的制动系统的制动力放大器
中得以确保。
15.用于车辆的制动系统也具有上述优点,倘若该制动系统包括:相应的控制单元;带有至少能调整的活塞的主制动缸;带有至少驾驶员制动力传递部件的制动操纵元件,通过驾驶员制动力传递部件能将驾驶员制动力传递到主制动缸的能调整的活塞上;带有至少放大器力传递部件的制动力放大器,通过放大器力传递部件能将由制动力放大器提供的放大器力传递到主制动缸的能调整的活塞上;传感器,该传感器设计用于,将有关于制动操纵元件的驾驶员制动力传递部件的或制动力放大器的放大器力传递部件的调整行程的传感器信号提供给控制单元;连接在主制动缸上的制动液贮存器;至少一个连接在主制动缸上的、带有其泵马达控制机构的液压泵;和至少一个连接在至少一个液压泵的输送侧上的车轮制动缸。
16.此外,实施用于运行车辆的制动系统的对应的方法也创造了上述优点。明确指出,用于运行车辆的制动系统的方法可以按照控制单元的上面阐释的实施方式进行扩展设计。
附图说明
17.接下来借助附图阐释本发明的另外的特征和优点。
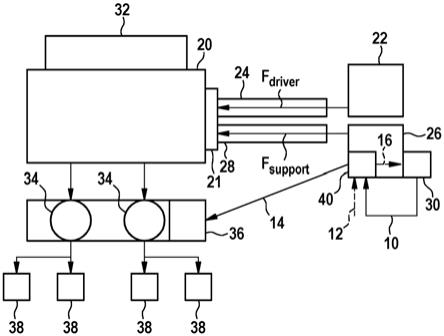
18.图1示出了用于阐释用于运行车辆的制动系统的方法的一种实施方式的功能图;并且图2a至2f示出了装备有控制单元的一种实施方式的制动系统的示意图和用于阐释控制单元的工作方式的坐标系。
具体实施方式
19.图1示出了用于阐释用于运行车辆的制动系统的方法的一种实施方式的功能图。
20.下文所说明的方法可以实施用于运行车辆/机动车的制动系统。已指出的是,该方法的可实施性既不局限于所说明的制动系统的特殊的制动系统类型,也不局限于装备有制动系统的车辆/机动车的特别的车辆类型/机动车类型。
21.在方法步骤s1中,检查或估计,制动系统的主制动缸的能调整的活塞是否从其起始位置调整了等于预定的极限制动行程的制动行程地调整进入主制动缸。起始位置尤其指的是主制动缸的能调整的活塞的一个位置,在该位置中,主制动缸的由能调整的活塞限界的并且能用/用制动液填充的腔室具有最大的体积,该腔室的体积可以借助将能调整的活塞调整到主制动缸中而减小。主制动缸的能调整的活塞尤其可以指的是主制动缸的杆活塞。预定的极限制动行程优选等于最大可能的制动行程,主制动缸的能调整的活塞最多可以调整了该最大可能的制动行程地进入主制动缸。调整了极限制动行程后的活塞尤其可以撞在构造在主制动缸中的止挡上,并且因此不能继续调整进入主制动缸。
22.至少借助由传感器提供的关于制动系统的制动操纵元件的驾驶员制动力传递部件的或制动系统的制动力放大器的放大器力传递部件的调整行程的传感器信号10在方法步骤s1中实施检查或估计,看主制动缸的能调整的活塞的制动行程是否等于预定的极限制动行程。驾驶员制动力传递部件是制动操纵元件的部件,通过所述驾驶员制动力传递部件能将驾驶员制动力传递到主制动缸的能调整的活塞上。制动系统的制动操纵元件例如可以指的是制动踏板。驾驶员制动力传递部件可以例如是输入杆。
23.放大器力传递部件是制动力放大器的部件,通过放大器力传递部件能将由制动力放大器提供的放大器力传递到主制动缸的能调整的活塞上。制动力放大器可以尤其是机电的制动力放大器。例如放大器活塞可以称作制动力放大器的放大器力传递部件。借助术语“调整行程”表明借助驾驶员制动力或放大器力促成的驾驶员制动力传递部件或放大器力传递部件从(没有力的)起始位置起的行程。
24.传感器信号10优选由构造成机电的制动力放大器的制动力放大器的电动马达的旋转传感器或马达电流传感器提供。这种传感器类型能方便地安装在机电的制动力放大器处。
25.另外的传感器信号12可选还可以一起被评估以用于检查或估计,主制动缸的能调整的活塞的制动行程是否等于预定的极限制动行程。所述另外的传感器信号12可以例如是关于构造成输入杆的驾驶员制动力传递部件的调整行程的杆行程传感器的杆行程信号或者行程差传感器的关于在输入杆的调整行程和构造成阀体的放大器力传递部件的调整行程之间的行程差的行程差信号。
26.方法步骤s1可以任意频繁地重复。倘若识别或估计到,主制动缸的能调整的活塞的制动行程等于预定的极限制动行程,那么至少实施方法步骤s2。作为方法步骤s2,这样来激活制动系统的至少一个液压泵的泵马达控制机构,使得借助至少一个由泵马达控制机构驱控的液压泵将制动液从制动系统的制动液贮存器输送到制动系统的至少一个车轮制动缸中。至少一个控制信号14为此输出给所述泵马达控制机构。因此即使在主制动缸的能调整的活塞的制动行程等于最大可能的制动行程并且因此不再能进一步制动进入主制动缸的情况下,还促成了在至少一个车轮制动缸中的制动压力升高。因此为了实施在此所说明的方法,可以毫无问题地使用带有较小的主制动缸长度的、这就是说带有主制动缸沿其能调整的活塞的调整方向的较小的最大的伸展长度的主制动缸类型。与主制动缸配合作用的制动力放大器也可以相应地沿着主制动缸的能调整的活塞的调整方向构造得较短,这如上文已经阐释的那样降低了在驾驶员的车辆/机动车发生事故的情况下驾驶员受伤的风险。
27.在识别或估计到,主制动缸的能调整的活塞的制动行程等于预定的极限制动行程时,优选也确定了关于从制动液贮存器有待输送进入至少一个车轮制动器的额定体积流量的额定参量。在这种情况下,可以借助至少一个控制信号14这样来激活泵控制机构,使得对应额定参量的实际体积流量借助至少一个由泵控制机构驱控的液压泵从制动液贮存器输送进入至少一个车轮制动缸。至少借助传感器信号10和/或借助另外的传感器信号12来确定所述额定参量。驾驶员制动力传递部件的和/或放大器力传递部件的速度,例如输入杆的调整行程的随时间的增加或减少、阀体的调整行程的随时间的增加或减少和/或行程差的随时间的增加或减少也可以评估用于确定所述额定参量。
28.作为有利的扩展设计方案,在(可选的)方法步骤s3中,由制动力放大器通过放大器力传递部件提供的、传递到主制动缸的能调整的活塞上的放大器力,可以与所识别到的/所估计到的能调整的活塞的制动行程等于预定的极限制动行程的状况相匹配。实施方法步骤s3是用于运行制动力放大器的一种有利的扩展设计方案,倘若在运行制动力放大器时至少按照第一特征线/标准特征线或者第二特征线/力平衡特征线确定了关于借助制动力放大器有待实施的额定放大器力的额定放大器参量,并且紧接着借助至少一个放大器控制信号16这样来驱控制动力放大器,使得制动力放大器通过放大器力传递部件提供了对应额定
放大器参量的放大器力。如下文中更为准确地阐释那样,倘若识别或估计到,主制动缸的能调整的活塞的制动行程低于预定的极限制动行程,那么按照第一特征线/标准特征线确定额定放大器力。与此对应,在实施方法步骤s3时,因为识别或估计到,主制动缸的能调整的活塞的制动行程等于预定的极限制动行程,所以按照第二特征线/力平衡特征线确定额定放大器参量。第二特征线/力平衡特征线和第一特征线/标准特征线可以例如是函数,其向驾驶员制动力传递部件的调整行程指派了特定的额定放大器力或放大器力传递部件的对应该额定放大器力的额定调整行程或者在输入杆的调整行程和阀体的调整行程之间的相应的额定行程差。
29.第二特征线/力平衡特征线和第一特征线/标准特征线优选作为函数被这样确定,使得第二特征线/力平衡特征线相比第一特征线/标准特征线向驾驶员制动力传递部件的调整行程指派了更低的额定放大器力或放大器力传递部件的更小的额定调整行程或相应匹配的额定行程差。以这种方式这样来调节操纵制动操纵元件的驾驶员的制动操纵感觉/踏板感觉,使得驾驶员没有/几乎没有感知到主制动缸的能调整的活塞调整了预定的极限制动行程的反作用。
30.作为进一步的有利的补充,可以在实施方法步骤s2(和可能时方法步骤s3)之后重复方法步骤s1至少一次。若在这种情况下识别或估计到,主制动缸的能调整的活塞的制动行程小于极限制动行程,那么在方法步骤s4中,泵控制机构可以借助至少一个禁用信号18对此进行驱控,即,使至少一个由泵控制机构驱控的液压泵停运。此外,在方法步骤s5中,根据第一特征线/标准特征线确定关于制动力放大器的有待实施的额定放大器力的额定放大器参量,因而制动力放大器紧接着再次“按照标准”运行。
31.图2a至2f示出了装备有控制单元的一种实施方式的制动系统的示意图和用于阐释所述控制单元的工作方式的坐标系。
32.在图2a中示意性示出的制动系统具有带有至少一个能调整的活塞21的主制动缸20。能调整的活塞21可以例如指的是主制动缸20的杆活塞。主制动缸20除了构造成杆活塞的能调整的活塞21外也可以选择性地具有浮动活塞。
33.制动系统也具有带有至少一个驾驶员制动力传递部件24的制动操纵元件22,驾驶员制动力f
driver
能通过该至少一个驾驶员制动力传递部件传递到主制动缸20的能调整的活塞21上。制动操纵元件22可以例如包括制动踏板。驾驶员制动力传递部件24可以尤其是输入杆。
34.此外,制动系统还包括带有至少一个放大器力传递部件28的制动力放大器26,由制动力放大器26提供的放大器力f
support
能通过所述至少一个放大器力传递部件传递到主制动缸20的能调整的活塞21上。制动力放大器26尤其可以是带有(未示出的)电动机的机电的制动力放大器。放大器力传递部件28因此可以例如指的是放大器活塞。但制动系统的可构造性并不局限于将机电的制动力放大器用作制动力放大器26。
35.传感器30设计用于,提供关于制动操纵元件22的驾驶员制动力传递部件24的或者制动力放大器26的放大器力传递部件28的调整行程的上文已经说明的传感器信号10。下文中还将提到针对传感器30的实施例。
36.还额外将制动液贮存器32连接在主制动缸20上。此外,带有泵控制机构36的至少一个液压泵34液压地连接在主制动缸20上。主制动缸20优选这样构造带有用于密封其至少
一个嗅探钻孔的能翻转的密封装置,使得在主制动缸20中存在借助至少一个泵34促成的抽吸压力时该主制动缸的密封装置翻转并且因此变得能透过液体。至少一个泵34在这种情况下可以通过主制动缸20也在密封其至少一个嗅探钻孔之后还将制动液从制动液贮存器32抽吸出来。
37.所述至少一个泵34和其泵控制机构36可以尤其是制动系统的esp系统(电子稳定性程序的系统)的一部分。此外,制动系统具有至少一个车轮制动缸38,该车轮制动缸液压地连接在至少一个泵34的输送侧上。
38.制动系统此外也具有控制单元40,该控制单元在图2a至2f的实施方式中例如是制动力放大器26的下部单元。控制单元40因此可以称为制动力放大器控制单元。控制单元40可以特别是集成在制动力放大器的壳体内。但指出的是,控制单元40在其与制动力放大器26间隔开/分开地在制动系统处存在时才可以实施下文中说明的功能。
39.控制单元40设计用于,至少借助由传感器30提供的关于驾驶员制动力传递部件24的或放大器力传递部件28的调整行程的传感器信号10识别或估计,主制动缸20的能调整的活塞21从其起始位置起是否调整了等于预定的极限制动行程s0的制动行程s地调整进入主制动缸20。借助术语“调整行程”表明了驾驶员制动力传递部件24的或放大器力传递部件26的借助驾驶员制动力f
driver
或放大器力f
support
促成的从(没有力的)起始位置起的行程。极限制动行程s0可以尤其指的是最大可能的制动行程s,能调整的活塞21最高能调整了该最大可能的制动行程地调整进入主制动缸20中。尤其可以这样来设计主制动缸20,使得调整了极限制动行程s0的活塞21撞在止挡上,并且因此没有能够进一步调整进入主制动缸20。
40.若控制单元40识别或估计到,主制动缸20的能调整的活塞21的制动行程s等于预定的极限制动行程s0,那么控制单元40设计用于,将上文已经说明的至少一个控制信号16输出给至少一个液压泵34的泵控制机构36,由此能这样/这样激活所述泵控制机构,使得借助至少一个由泵控制机构36驱控的液压泵34能将/将制动液从制动液贮存器32输送到至少一个车轮制动缸38中。
41.控制单元40因此可以保证,即使在主制动缸20的能调整的活塞21撞在止挡上时,当调整了极限制动行程s0后的活塞21不再能继续调整进入主制动缸20时,还促成了在所述至少一个车轮制动缸38中的制动压力上升。控制单元40因此适用于mvr功能(英文为master cylinder volume replacement),由此改进了装备有制动系统的车辆/机动车的安全标准。
42.控制单元40因此使提供能从主制动缸20借助能调整的活塞21压出的“储备体积”变得多余。主制动缸20的主制动缸长度,这就是说,主制动缸20沿着其能调整的活塞21的调整方向的最大的伸展长度,因此可以比在现有技术中更短。制动力放大器26也可以沿着能调整的活塞21的调整方向构造得较短,因此制动力放大器26能更为方便地安装在车辆/机动车处,制动力放大器26无需(远远)伸入到车辆/机动车的车辆乘坐空间中。这有助于降低车辆/机动车的驾驶员在驾驶员的车辆/机动车发生事故的情况下受伤的风险。
43.控制单元40优选设计用于,至少借助由构造成机电的制动力放大器的制动力放大器26的电动马达的旋转传感器或马达电流传感器提供的关于放大器力传递部件38的调整行程的传感器信号10来识别或估计,主制动缸20的能调整的活塞21的制动行程s是否等于预定的极限制动行程s0。因此可以一起使用电动马达的旋转传感器或马达电流传感器作为传感器30。因为电动马达通常已经装备有这种传感器类型,所以可以使用没有制动系统的
传感装置的扩展方案的控制单元40。
44.控制单元40可选也能设计用于,在额外考虑到上文已经提到的另外的传感器信号12的情况下识别或估计,主制动缸20的能调整的活塞21的制动行程s是否等于预定的极限制动行程s0。所述另外的传感器信号12可以例如是构造为输入杆的驾驶员制动力传递部件24的杆行程传感器的杆行程信号(关于输入杆的调整行程)或者是行程差传感器的行程差信号(关于在输入杆的调整行程和构造成放大器活塞的放大器力传递部件28的调整行程之间的行程差)。因此已经公知的传感器类型可以与控制单元40配合作用。
45.作为有利的扩展设计方案,倘若控制单元40识别或估计到,主制动缸20的能调整的活塞21的制动行程s等于预定的极限制动行程s0,那么控制单元40可以额外设计用于,至少借助所提供的传感器信号10和/或另外的传感器信号12确定关于从制动液贮存器32有待输送到至少一个车轮制动缸38中的额定体积流量的额定参量,并且借助至少一个控制信号16这样来激活泵控制机构36,使得对应额定参量的实际体积流量q借助至少一个由泵控制机构36驱控的液压泵34能从/从制动液贮存器32输送到至少一个车轮制动缸38中。制动液34从制动液贮存器32到至少一个车轮制动缸38中的输送因此可以与驾驶员的制动意愿预先给定相匹配。
46.控制单元40也可以构造用于实施另外的功能。控制单元40例如可以额外设计用于,至少借助所提供的传感器信号10和/或另外的传感器信号12确定关于借助制动力放大器26有待实施的额定放大器力的额定放大器参量,并且借助至少一个上文已经提到的放大器控制信号16这样来驱控制动力放大器26,使得制动力放大器16通过放大器力传递部件28提供对应额定放大器参量的放大器力f
support
。控制单元40因此也可以毫无问题地一起实施传统的制动力放大器控制单元的功能。
47.作为另外的有利的扩展设计方案,倘若控制单元40识别或估计到,主制动缸20的能调整的活塞21的制动行程s低于预定的极限制动行程s0,那么控制单元40可以额外设计用于,根据预定的第一特征线确定额定放大器参量,并且倘若控制单元40识别或估计到,主制动缸20的能调整的活塞21的制动行程s等于预定的极限制动行程s0,那么控制单元可以额外设计用于根据预定的第二特征线确定额定放大器参量。第一和第二特征线可以例如是函数,它们向驾驶员制动力传递部件24的调整行程指派了特定的额定放大器力或放大器力传递部件28的对应该额定放大器力的额定调整行程或者在输入杆的调整行程和阀体的调整行程之间的相应的额定行程差。第一和第二特征线优选作为函数被这样确定,使得第二特征线相比第一特征线向驾驶员制动力传递部件24的调整行程提供了更低的额定放大器力或放大器力传递部件28的更小的额定调整行程或相应匹配的额定行程差。第一特征线因此可以称为标准特征线,第二特征线则能解释为力平衡特征线。借助在此所说明的特征线变换可以这样来调节操纵制动操纵元件22的驾驶员的制动操纵感觉/踏板感觉,使得驾驶员没有/几乎没有感知到主制动缸20的能调整的活塞21调整了预定的极限制动行程s0的反作用。制动力放大器26的放大器力f
support
尤其可以借助在此所说明的特征线变换在识别或估计到主制动缸20的能调整的活塞21的制动行程s等于预定的极限制动行程s0时这样受到限制,使得驾驶员不会被鼓励试图推开对抗能调整的活塞21作用的止挡,因为在此由驾驶员感受到的“制动操纵元件22的行为”会刺激驾驶员。
48.借助图2b至2f的坐标系再次示意性地阐释控制单元40的工作方式:
在图2b至2f的坐标系中,横坐标分别是时间轴t。借助图2b的坐标系的纵坐标表明主制动缸20的能调整的活塞21的制动行程s。图2c的坐标系的纵坐标表明行程差。借助至少一个液压泵34促成的从制动液贮存器32到至少一个车轮制动缸38中的实际体积流量q借助图2d的坐标系的纵坐标示出。图2e和2f的坐标系的纵坐标再现了在至少一个车轮制动缸38中存在的制动压力p
38
和在主制动缸20中存在的主制动缸内压p
20
。
49.从时间t0起,驾驶员操纵其制动操纵元件32。但直至时间t3,主制动缸20的能调整的活塞21的制动行程s仍保持低于预定的极限制动行程s0。从时间t3起,主制动缸20的能调整的活塞21的制动行程s才等于预定的极限制动行程s0,因此也从时间t3起才激活至少一个液压泵34。至少一个液压泵34从时间t3起在主制动缸20中产生了抽吸压力,因此主制动缸内压p
20
降到(几乎)零。至少一个液压泵34同时将制动液从制动液贮存器32输送到至少一个车轮制动缸38中,因而在至少一个车轮制动缸38中存在的制动压力p
38
上升。如借助图2d的坐标系可以看到的那样,借助至少一个液压泵34促成的实际体积流量还可以与驾驶员制动意愿匹配。同时可以这样来调节行程差,使得驾驶员还具有符合标准的制动操纵感觉/踏板感觉。
50.从时间t4起,主制动缸20的能调整的活塞21的制动行程s又低于预定的极限制动行程s0。至少一个液压泵34因此从时间t4起又处在其非活跃模式中。
51.要指出的是,控制单元40/构造带有该控制单元的制动系统的可使用性并不局限于特殊的车辆类型/机动车类型。在控制单元40、传感器30、泵控制机构36和可能时制动力放大器16之间的通信可以通过网络、例如通过can(控制器局域网)或通过flexray进行。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
