技术特征:
1.一种智能网联汽车队列系统中纵向控制方法,包括:确定智能网联汽车队列系统中可接受的通信延迟上界值h1,其是通过预设的性能指标来确定的;在t时刻存在时变通信延迟值λ
t
的条件下,分别获取第i辆车和第i-1辆相对于领航车的位置误差、速度误差和加速度误差,得到第i辆车的系统状态量和第i-1辆车的系统状态量根据系统状态量以及预先获取的第i辆车的增益系数矩阵确定第i辆车在t时刻的控制策略u
i
,其中增益系统矩阵是根据预设的性能指标来确定的;采用所述控制策略u
i
对第i辆车在第t时刻的行驶状态进行纵向控制。2.根据权利要求1所述的方法,其特征在于,采用如下计算表达式得到第i辆车在t时刻的控制策略u
i
,包括:其中,λ
t
∈[0,h1],且λ
t
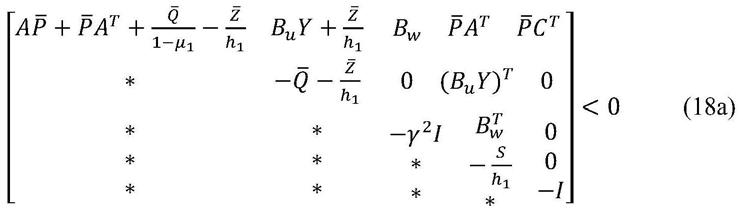
的导数值小于通信延迟的导数的上限值,其中h1为通信延迟的上限值。3.根据权利要求2所述的方法,其特征在于,第i辆车的增益系数矩阵是通过如下方式得到的,包括:步骤a、确定性能指标j(w);其中,其中,z(t)为系统被控输出;w(t)为系统干扰;γ为性能约束;步骤b、在符合性能指标的条件下,确定车辆队列稳定的充分必要条件,进一步得到非线性最小化方程;其中,lmis表示由车辆队列稳定性条件中推得的线性矩阵不等式约束,包括:其中,lmis表示由车辆队列稳定性条件中推得的线性矩阵不等式约束,包括:其中,lmis表示由车辆队列稳定性条件中推得的线性矩阵不等式约束,包括:其中,lmis表示由车辆队列稳定性条件中推得的线性矩阵不等式约束,包括:其中,lmis表示由车辆队列稳定性条件中推得的线性矩阵不等式约束,包括:
其中,s、t、j、和r均为待求矩阵;a表示车辆队列的系统矩阵;b
u
表示车辆队列的控制系数矩阵;b
w
表示车辆队列的干扰系数矩阵;且,b
u
、b
w
与a均是对角矩阵;步骤c、对非线性最小化方程进行锥补线性化求解,得到优化解以及通信延迟上界值h1;步骤d、根据优化解得到第i车辆的增益系数矩阵4.根据权利要求3所述的方法,其特征在于,所述步骤c包括:步骤c1、设定初始的通信延迟上界h
1o
、性能约束γ、通信延迟的导数上界μ1、最大的迭代次数k
max
;初始化迭代次数k;步骤c2、基于上述lmis条件限制下,进行可行性问题的求解,寻找可行解s0,t0,j0,r0;步骤c3、计算线性矩阵不等式方式的优化解,得出优化解t,s,j和r;步骤c4、在优化解使得矩阵φ2小于0时,将通信延迟上界h1增大并返回步骤c2;在优化解使得矩阵φ2不小于0时,判断迭代次数是否超过最大的迭代次数k
max
;若超过,则流程结束,并输出对应优化解以及通信延迟上界值h1;如果未超过最大的迭代次数k
max
,则迭代次数k=k 1,并返回步骤c3;其中,y=kp-1
、5.根据权利要求3所述的方法,其特征在于,所述步骤d包括:利用优化解获取增益系数矩阵k;按照如下方式对增益系数矩阵k进行拆分,得到第i车辆的增益系数矩阵
其中,n为车辆队列中车辆的总数。6.一种存储介质,其特征在于,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为运行时执行所述权利要求1至5任一项中所述的方法。7.一种电子装置,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行所述权利要求1至5任一项中所述的方法。8.一种智能网联汽车队列系统中纵向控制装置,包括如权利要求7所述的电子装置。
技术总结
本申请实施例公开了一种智能网联汽车队列系统中纵向控制方法和装置。所述方法包括:确定智能网联汽车队列系统中可接受的通信延迟上界值h1,其是通过预设的性能指标来确定的;在t时刻存在时变通信延迟值λ
技术研发人员:王红 彭利明 白先旭 于文浩
受保护的技术使用者:清华大学
技术研发日:2021.10.13
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。