1.本发明涉及无人船领域,更具体地说,涉及一种便携式无人船试验平台。
背景技术:
2.传统的码头外观检测,需要雇佣渔船,采用人工携带摄影摄像设备,乘坐渔船沿码头按规定以固定距离进行录像或拍照检查,发现问题后,需要靠近码头,使用钢尺等测量设备,对病害尺寸进行测量。但人工测量有诸多问题:
3.1、伴随禁渔期法令的严格实施,港区附近租用渔船进行外观检测越来越难,成本越来越高;2、渔船驾驶人员素质不一,安全意识淡薄,海上作业安全风险较大;3、由于数百米的码头结构形式基本相似,人工录像、摄影的视频很难精确确定拍摄位置;4、渔船的晃动会传递给摄像设备,拍摄后画面摇摇晃晃,后期人工查看视频,会出现眩晕状态,编辑报告难度系数较高;5、受到渔船吃水深度、船体长度、动力因素等影响,无法靠近较浅水域进行检查作业。
4.因此,急需一种便携式无人船试验平台用于码头的外观检测,而现有无人船往往在运输便携性、试验设备通用性、多功能性等方面存在问题。
技术实现要素:
5.本发明要解决的技术问题是提供一种便携式无人船试验平台,以解决无人船平台在运输便携性、试验设备通用性、多功能性上的问题。
6.为了达到上述目的,本发明采取以下技术方案:
7.一种便携式无人船试验平台,包括两个平行的双气囊浮筒,每个双气囊浮筒由两个气囊浮筒拼接固定而成;
8.每个气囊浮筒上表面通过胶水固定有一个水平气囊固定件,每个气囊浮筒侧面通过胶水固定有一个竖直气囊固定件;
9.一个长方形的设备平台可拆卸式固定于两个双气囊浮筒上方;设备平台的四个角落处均开设有螺栓通过口,设备平台的四个角落处分别还竖直向下延伸出一个竖直平台固定件;设备平台的四个角落分别与四个水平气囊固定件通过穿过螺栓通过口的螺栓以及螺母固定;四个竖直平台固定件分别与四个竖直气囊固定件平行贴合后通过螺栓与螺母固定;
10.竖直平台固定件上还通过螺栓螺母固定有l型的推进器固定架,推进器固定架上固定有推进器;
11.设备平台的中部还设置有多功能平台支架。
12.设备平台包括多条型材,包括围成一个长方形且作为四条边的外边框型材、垂直连接于长方形两条长之间的两条第一内边框型材、垂直连接于两条第一内边框框架之间的两条第二内边框框架,以及垂直连接于第一内边框型材和长方形的宽之间的四条第三内边框型材。
13.每条第一内边框型材与临近的一条长方形的宽的间距均相等;每条第三内边框型材与临近的一条长方形的长的间距均相等。
14.螺栓通过口设置于长方形的两条长的两端,四个竖直平台固定件分别安装于四条第三内边框型材下方;多功能平台支架安装于两条第二内边框框架上。
15.多功能平台支架包括水平的无人船水面固定平台,无人船水面固定平台上表面中心竖直向上延伸出一根水上设备固定杆,水上设备固定杆顶部固定有传感器固定座;传感器固定座用于固定差分gps;
16.无人船水面固定平台下表面竖直向下延伸出四根呈长方形四个顶点分布的水下连接杆,四根水下连接杆底部共同连接于一个水平的水下设备固定平台,水下设备固定平台的中心开设有一个连接口,水下设备固定平台上表面环绕连接口竖直朝上延伸出设备锁紧环;连接口及设备锁紧环用于连接并锁紧测深换能器上设置的换能器连接杆;
17.设备锁紧环与水上设备固定杆位于同一竖直线。
18.差分gps、测深换能器均通过线缆将数据传输至设备数据采集箱。
19.无人船水面固定平台上还开设有用于连接陀螺仪的螺栓孔。
20.本发明相对于现有技术的优点在于,本项技术结构简单,易于制造;可以实现多种无人船试验测试;可以测试多种推进器动力效果;可以折叠收纳,便于操作,降低运输成本。
附图说明
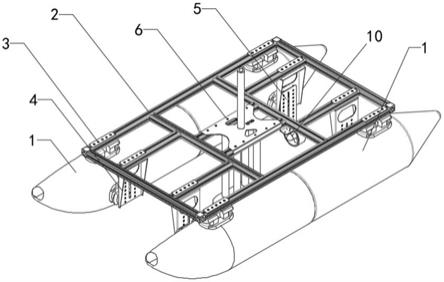
21.图1是本发明试验平台示意图;
22.图2是本发明水平气囊固定件与设备平台固定的侧视图;
23.图3是本发明水平气囊固定件以及竖直气囊固定件与设备平台固定的主视图;
24.图4是多功能平台支架示意图。
25.图中,1、双气囊浮筒,2、设备平台,3、螺栓通过口,4、竖直平台固定件,5、推进器固定架,6、多功能平台支架,7、水平气囊固定件,8、竖直气囊固定件,9、推进器固定架,10、推进器,11、水上设备固定杆,12、无人船水面固定平台,13、水下连接杆,14、水下设备固定平台,15、设备锁紧环,16、测深换能器,17、传感器固定座,18、设备数据采集箱。
具体实施方式
26.下面结合附图对本发明的具体实施方式作描述。
27.如图1至图4所示,本发明一种便携式无人船试验平台,包括两个平行的双气囊浮筒1,每个双气囊浮筒1由两个气囊浮筒拼接固定而成;
28.每个气囊浮筒上表面通过胶水固定有一个水平气囊固定件7,每个气囊浮筒侧面通过胶水固定有一个竖直气囊固定件8;
29.一个长方形的设备平台2可拆卸式固定于两个双气囊浮筒1上方;设备平台2的四个角落处均开设有螺栓通过口3,设备平台2的四个角落处分别还竖直向下延伸出一个竖直平台固定件4;设备平台2的四个角落分别与四个水平气囊固定件7通过穿过螺栓通过口3的螺栓以及螺母固定;四个竖直平台固定件4分别与四个竖直气囊固定件8平行贴合后通过螺栓与螺母固定;
30.竖直平台固定件4上还通过螺栓螺母固定有l型的推进器固定架5,推进器固定架5
上固定有推进器10;
31.设备平台2的中部还设置有多功能平台支架6。
32.设备平台2包括多条型材,包括围成一个长方形且作为四条边的外边框型材、垂直连接于长方形两条长之间的两条第一内边框型材、垂直连接于两条第一内边框框架之间的两条第二内边框框架,以及垂直连接于第一内边框型材和长方形的宽之间的四条第三内边框型材。
33.每条第一内边框型材与临近的一条长方形的宽的间距均相等;每条第三内边框型材与临近的一条长方形的长的间距均相等。
34.螺栓通过口3设置于长方形的两条长的两端,四个竖直平台固定件4分别安装于四条第三内边框型材下方;多功能平台支架6安装于两条第二内边框框架上。
35.多功能平台支架6包括水平的无人船水面固定平台12,无人船水面固定平台12上表面中心竖直向上延伸出一根水上设备固定杆11,水上设备固定杆11顶部固定有传感器固定座17;传感器固定座17用于固定差分gps;
36.无人船水面固定平台12下表面竖直向下延伸出四根呈长方形四个顶点分布的水下连接杆13,四根水下连接杆13底部共同连接于一个水平的水下设备固定平台14,水下设备固定平台14的中心开设有一个连接口,水下设备固定平台14上表面环绕连接口竖直朝上延伸出设备锁紧环15;连接口及设备锁紧环15用于连接并锁紧测深换能器16上设置的换能器连接杆;
37.设备锁紧环15与水上设备固定杆11位于同一竖直线。
38.差分gps、测深换能器16均通过线缆将数据传输至设备数据采集箱18。
39.无人船水面固定平台12上还开设有用于连接陀螺仪的螺栓孔。
40.本发明船体由两组双气囊浮筒1组成,任何一个气囊泄气可以保证船体不下沉。
41.设备平台2采用标准铝型材制作,表面有滑道,可以用来放置控制器、固定试验用仪器设备。
42.推进器10固定件架主要用来固定推进器10,也可以在其他位置增设推进器10。推进器10可以在首尾分别设置,两组推进器10推力方向垂直,一个控制前进动力,一个控制方向。
43.推进器10主要固定在推进器固定架5上,推进器固定架5呈l型,短边预留螺丝孔用来与不同推进器10进行固定,螺栓穿过推进器固定架5旋转拧入螺母内部,实现固定推进器10功能。
44.以上所说的螺栓与螺母均可采用不锈钢材料。
45.本发明使用的时候,试验平台通过双气囊浮筒1浮于水面,通过推进器10可以控制船的前进和方向的调整。可设置能与外界通信的控制箱对推进器10进行遥控控制。多功能平台支架6上的测量设备可以用于测量一些数据,下面做一些举例。
46.将多功能平台支架6上的无人船水面固定平台12固定于无人船上的第二内边框框架上,传感器固定座17位于水上,水下设备固定平台14位于水下。针对于测量无人船的三维位置测量,传感器固定座17用于固定差分gps、水下设备固定平台14用于固定测深换能器16,通过差分gps可以准确测量到无人船所处经纬度,从而根据已有测量数据获得当地水底的地质高度,结合测深换能器16所测得的水深即可准确获得无人船的三维位置,其中,由于
支架的特殊设计,测深换能器16与差分gps得以处于一个竖直线,从而能够确保经纬度和高度的测量得到对应,测量的三维点更加准确。除此之外,可以在无人船水面固定平台12上设置姿态仪、陀螺仪、陀螺减摇仪等,从而对于无人船晃动时测深换能器16的指向位置偏差进行记录,从而修正数据。测深换能器16、差分gps、陀螺仪等均连接至设备数据采集箱18进行数据处理。
47.除此之外,传感器固定座17采用螺栓结构,从而可以通过更换的方式固定除了rtkgps(差分gps)外的雷达天线、摄像机、无线中继电台、气象仪采集、红外摄像机等;水下设备固定平台14结合设备锁紧环15可以通过更换的方式用来固定除了测深换能器16外的验潮仪、多波束测深仪、流量计等,由此来实现无人船的其他测量工作。
48.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
