1.本发明涉及飞行器技术领域,特别是涉及一种浮空器及其推进方法。
背景技术:
2.浮空器在空中飞行时,通过采用螺旋桨作为其推进系统。常规的螺旋桨推进系统的高效率点是按照特定的抗风进行设计,当飞行高度和速度发生变化时,会使螺旋桨翼型的雷诺数和前进比发生变化,导致偏离设计点,使得推力和效率大幅下降。为了提高推进系统的性能,提出采用模仿鱼尾摆动的推进方式,将浮空器上起稳定作用的充气尾翼进行摆动产生推进力。鱼尾摆动推进具有高效、易实现自适应、桨舵合一,高机动性以及无噪音等显著特点。
3.申请公布号为cn 110294096 a的中国专利公开了一种基于磁吸式摇杆的浮空机器鱼,包括充气鱼体、胸鳍模块、臀鳍模块、背鳍模块、轻质鱼尾、控制模块和动力模块,该方案采用单体的鱼形的本体设置,单鱼形设置使得浮空机器鱼移动速度比旋翼无人机慢的多,可以适合在低空或室内飞行,但是如果用于高空飞行或高速飞行,单鱼尾摆动会引起整个浮空器重心、惯量等参数发生变化,容易使浮空器姿态出现大幅摆动。
4.申请公布号为cn 112498638 a的中国专利公开了一种高速摆动的两关节仿生鱼尾装置,包括鱼尾前部、鱼尾中部和鱼尾尾鳍,鱼尾前部设有驱动装置安装架、主动轴、第一曲轴和第二曲轴,鱼尾中部的前端设有第一关节从动轴,鱼尾尾鳍的前端设有第二关节从动轴;该方案的仿生鱼尾装置在运行时,主动轴在电机的驱动下转动从而通过齿轮带动第一曲轴和第二曲轴转动,第一曲轴和第二曲轴通过套在连杆轴颈上的皮带分别带动第一关节从动轴和第二关节从动轴转动,实现仿生鱼尾摆动,本方案依靠单个电机实现双关节仿生鱼尾的高速摆动,两个关节不能独立控制,也就是说,该方案只是摆动速度的提升,不利于实现更大幅度的摆动。而如果将该方案应用于申请公布号为cn 110294096 a的方案中,将会进一步的导致浮空器姿态的不稳定。
5.综上,如何能够既可以实现高效的推进又可避免浮空器自身姿态的振荡,来提高整个浮空器的飞行性能是亟待解决的技术问题。
技术实现要素:
6.本发明的目的是提供一种浮空器及其推进方法,以解决上述现有技术存在的问题,将充有浮升气体的鱼形气囊并列连接,利用第一摆动驱动节点和第二摆动驱动节点分别驱动鱼尾段和尾翼段摆动,在提高摆动幅度的基础上,能够实现对称摆动,从而既可以实现高效的推进又可避免浮空器自身姿态的振荡,能够提高整个浮空器的飞行性能。
7.为实现上述目的,本发明提供了如下方案:
8.本发明提供一种浮空器,包括并列连接的鱼形气囊,所述鱼形气囊内填充有浮升气体,所述鱼形气囊包括鱼身段、鱼尾段和尾翼段,所述鱼身段与所述鱼尾段之间设置有第一摆动驱动节点,所述鱼尾段与所述尾翼段之间设置有第二摆动驱动节点。
9.优选地,所述鱼身段采用保压充气囊体,所述鱼尾段采用零压充气囊体。
10.优选地,所述尾翼段采用内部布置隔层的保形形式。
11.优选地,所述鱼身段和所述鱼尾段内均设置有纵向骨架和连接在所述纵向骨架上的若干环形骨架,所述环形骨架和所述纵向骨架选择碳纤维杆件或气撑式张弦结构。
12.优选地,相邻的所述鱼形气囊通过所述环形骨架连接。
13.优选地,所述鱼身段连接有鱼头段,所述鱼头段两侧分别设置有稳定鱼鳍。
14.优选地,所述鱼头段的端部设置有螺旋桨。
15.优选地,所述鱼形气囊的下部间隔设置有储水囊,所述储水囊之间通过泵体和管路连通。
16.本发明还提供一种浮空器的推进方法,包括以下步骤:
17.将鱼形气囊并列连接,所述鱼形气囊包括鱼身段、鱼尾段和尾翼段,所述鱼身段与所述鱼尾段之间设置有第一摆动驱动节点,所述鱼尾段与所述尾翼段之间设置有第二摆动驱动节点;
18.向所述鱼形气囊内充入浮升气体;
19.通过控制所述第一摆动驱动节点和所述第二摆动驱动节点,驱动所述鱼尾段和所述尾翼段摆动,推进所述鱼形气囊行进。
20.优选地,所述鱼尾段和所述尾翼段的摆动形式为对称摆动。
21.本发明相对于现有技术取得了以下技术效果:
22.(1)本发明将充有浮升气体的鱼形气囊并列连接,利用第一摆动驱动节点和第二摆动驱动节点分别驱动鱼尾段和尾翼段摆动,在提高摆动幅度的基础上,能够实现对称摆动,从而既可以实现高效的推进又可避免浮空器自身姿态的振荡,能够提高整个浮空器的飞行性能;
23.(2)本发明鱼身段为无运动部分,采用保压充气囊体,能够保证鱼形的形态,鱼尾段为运动部分,采用零压充气囊体,能够摆动更佳灵活,通过保压充气囊体和零压充气囊体的配合能够实现浮空器的稳定姿态和高效推进;
24.(3)本发明鱼身段和鱼尾段内均设置有若干环形骨架,环形骨架连接在纵向骨架上,环形骨架和纵向骨架的设置能够支撑鱼形气囊的结构形态,降低鱼形气囊的整体结构重量;
25.(4)本发明鱼形气囊的下部间隔设置有储水囊,储水囊之间通过泵体和管路连通,通过控制储水囊内的储水量能够调整鱼形气囊的重心,进而能够调整鱼形气囊的飞行姿态。
附图说明
26.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
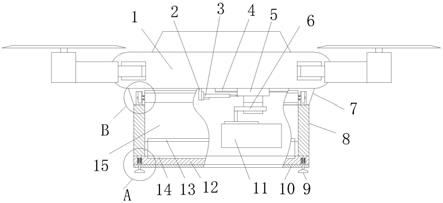
27.图1为本发明整体结构示意图;
28.图2为本发明一种骨架结构示意图;
29.图3为本发明另一种骨架结构示意图;
30.图4为圆形双鱼身单节点刚性摆动的摆动频率与速度和效率的关系(az=0.112m);
31.图5为单独naca0012、一致摆动及对称摆动三种情况下阻力系数随名义迎角的变化图;
32.图6为单独naca0012、一致摆动及对称摆动三种情况下升力系数随名义迎角的变化图;
33.图7为单独naca0012、一致摆动及对称摆动种情况下升阻比随名义迎角的变化图;
34.图8为单独naca0012和对称摆动名义迎角和升阻比变化图。
35.其中,1、鱼头段;2、鱼身段;3、鱼尾段;4、尾翼段;5、稳定鱼鳍;6、环形骨架;7、纵向骨架;8、第一摆动驱动节点;9、第二摆动驱动节点;10、螺旋桨;11、连接骨架;12、绳索。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.本发明的目的是提供一种浮空器及其推进方法,以解决现有技术存在的问题,将充有浮升气体的鱼形气囊并列连接,利用第一摆动驱动节点和第二摆动驱动节点分别驱动鱼尾段和尾翼段摆动,在提高摆动幅度的基础上,能够实现对称摆动,从而既可以实现高效的推进又可避免浮空器自身姿态的振荡,能够提高整个浮空器的飞行性能。
38.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
39.如图1~3所示,本发明提供一种浮空器,包括并列连接的鱼形气囊,鱼形气囊为制作成仿生鱼形的气囊或飞艇,包括囊体和囊体内的支撑骨架,囊体内填充有氦气、氢气或热空气等浮升气体,鱼形气囊在空气中能够漂浮,施加动力后能够行进;鱼形气囊包括鱼身段2、鱼尾段3和尾翼段4,各段之间可以没有明显的界限区分,囊体可以为一个整体;鱼身段2与鱼尾段3之间设置有第一摆动驱动节点8,鱼尾段3与尾翼段4之间设置有第二摆动驱动节点9,其中,第一摆动驱动节点8和第二摆动驱动节点9均可以采用伺服舵机制成,利用第一摆动驱动节点8能够驱动鱼尾段3进行摆动,利用第二摆动驱动节点9能够驱动尾翼段4进行摆动,两个摆动驱动节点均可以连接在支撑骨架上,通过驱动支撑骨架来驱动鱼尾段3或尾翼段4进行摆动,并且,第一摆动驱动节点8可以选择扭矩和功率更大的舵机,也就是说,第一摆动驱动节点8为主动力装置,第二摆动驱动节点9为辅动力装置,通过两个摆动驱动节点的设置,以实现更大的摆动幅度,并且,本发明在提高摆动幅度的基础上,能够实现对称摆动,从而既可以实现高效的推进又可避免浮空器自身姿态的振荡,能够提高整个浮空器的飞行性能。
40.鱼身段2可以采用保压充气囊体,鱼尾段3可以采用零压充气囊体。鱼身段2为无运动部分,采用保压充气囊体,能够保证鱼形的形态,鱼尾段3为运动部分,采用零压充气囊体,能够摆动更佳灵活,通过保压充气囊体和零压充气囊体的配合能够实现浮空器的稳定
姿态和高效推进。
41.尾翼段4可以采用内部布置隔层的保形形式,形成月牙状的尾翼形状,内部可以填充有浮升气体,在降低质量的同时还能保证足够的形状坚挺。
42.鱼身段2和鱼尾段3内均设置有纵向骨架7和连接在纵向骨架7上的若干环形骨架6,鱼头段1也可以设置有环形骨架6,多个环形骨架6的直径大小和圆度都不尽相同,能够形成鱼形气囊的各部分的形状。环形骨架6和纵向骨架7可以选择碳纤维杆件或气撑式张弦结构,碳纤维杆件刚度高、质量轻,能够适用于小型的浮空器,针对大型浮空器,若采用碳纤维结构,为了得到一定的刚度需要结构的截面尺寸较大,会引起结构的重量增大,此时,可以选择气撑式张弦结构。
43.如图2所示,环形骨架6可以通过连接骨架11连接,连接骨架11一端连接在纵向骨架7,另一端经过弯折后与环形骨架6连接,连接骨架11同时还可以形成多个贴合气囊内表面的结构,形成多个支撑点,具体环形骨架6和纵向骨架7连接时可以采用焊接或连接结构进行连接,如何连接为本领域的常规技术手段,此处不再赘述;另外,纵向骨架7可以在鱼身纵向上分成多段(摆动节点处活动连接),从而便于驱动节点的安装和设置,第一摆动驱动节点8可以设置在连接骨架11与纵向骨架7相连接的位置,第二摆动驱动节点9可以设置在尾翼段4与纵向骨架7连接的位置。
44.如图3所示,连接骨架11可以直接设置在环形骨架6的内径侧,一端与纵向骨架7连接,另一端与环形骨架6连接,形成一个辐条式支撑形式,然后在环形骨架6的周圈上再连接多条绳索12,利用绳索12和环形骨架6的外径侧共同支撑气囊的内表面,最终形成一个完整的鱼形气囊结构;该种结构形式下,第一摆动驱动节点8安装在鱼身段2和鱼尾段3之间设置的环形骨架6的中心位置,第二摆动驱动节点9设置在鱼尾段3和尾翼段4之间设置的环形骨架6的中心位置。
45.相邻的鱼形气囊可以通过环形骨架6连接,在连接时采用直径最大的环形骨架6直接接触连接,通过紧固结构进行固定,此时,不会影响鱼形气囊的整体结构,也可以在较小的环形骨架6之间设置连接杆等结构,支撑鱼形气囊并列的整体形式。
46.如图1所示,鱼身段2上还连接有鱼头段1,鱼头段1包括端部设置的尖端的鱼头形状,需要注意的是,此处所说的鱼头段1只是鱼形气囊上鱼头部位的大概描述,与鱼身段2并没有明确的区分界限,与实际的鱼头有一定的区别;在鱼头段1两侧可以分别设置有稳定鱼鳍5,稳定鱼鳍5通过在鱼形气囊的囊体上焊接的由囊体材料通过缝纫形成的桃形或椭圆形连接袢与鱼头段1的囊体连接,起到稳定性的作用。
47.鱼头段1的端部,即相当于鱼嘴的位置,可以设置有螺旋桨10,螺旋桨10能够提供鱼形气囊一定的推进力。
48.鱼形气囊的下部可以间隔设置有储水囊,储水囊可以为储水袋、储水箱等能够储水的装置,在鱼形气囊的不同位置设置,可以设置在环形骨架6上,设置在鱼形气囊的下部不会影响鱼形气囊的稳定姿态,不同的储水囊之间通过泵体和管路连通,在启动泵体后可以调整不同储水囊中的水量,从而可以调整鱼形气囊的姿态,进而调整浮空器的姿态。
49.本发明还提供一种浮空器的推进方法,包括以下步骤:
50.将鱼形气囊并列连接,鱼形气囊包括鱼身段2、鱼尾段3和尾翼段4,鱼身段2与鱼尾段3之间设置有第一摆动驱动节点8,鱼尾段3与尾翼段4之间设置有第二摆动驱动节点9;
51.向鱼形气囊内充入浮升气体;
52.通过控制第一摆动驱动节点8和第二摆动驱动节点9,驱动鱼尾段3和尾翼段4摆动,推进鱼形气囊行进。
53.在鱼形气囊的下部间隔设置有相互连通的储水囊,通过控制储水囊相对的储水量调整鱼形气囊的姿态。
54.鱼尾段3和尾翼段4的摆动形式可以为对称摆动,对称摆动的方式能够能够提高推进效率。
55.对本发明的推进状态的分析如下:
56.鱼尾(包括鱼尾段3和尾翼段4)为升力面,其在摆动的过程中与周围的空气产生相对运动,形成气动力,从而产生鱼形气囊前进的推力,两个鱼尾的对称摆动,使其由于尾部结构重量引起的扭矩相互抵消,消除对鱼姿态的影响,提高飞行的速度。
57.假定尾鳍的平动与转动频率一致,选取计算工况为:
58.d=4.0m,az=0.159c0=0.112m,f=(0.4~4.0)hz,θ0=25
°
,r=0(刚性摆动)。
59.圆形双鱼身单节点摆动下不同频率的匀速速度和效率(az=0.112m)如下表所示:
[0060][0061]
其中,各参数的含义如下:
[0062]
d双鱼尾仿鱼飞艇鱼身间距(m);
[0063]az
鱼尾的横移幅值(m);
[0064]
c0鱼尾特征弦长(m);
[0065]
f鱼尾摆动频率(1/s);
[0066]
θ0鱼尾的摆动角度幅值(rad);
[0067]
r刚性和柔性的判别系数,r=0为刚性摆动,r=1为柔性摆动;
[0068]
u鱼的游动速度(m/s);
[0069]
st斯特劳哈尔数;
[0070]
froude效率鱼尾摆动的效率;
[0071]
tu一个周期内的平均推力(n)与速度的乘积;
[0072]
p一个周期内的平均功率(w)。
[0073]
从图4可直观地看出摆动频率与匀速下的速度成正比关系,符合关系st=fa/u;摆动频率的增大会提高摆动推进效率。
[0074]
并列设置的鱼形气囊,其双鱼尾一致摆动会使整体的推进效率减小,对称摆动随着间距的减小能够提高整体的推进效率。
[0075]
结合图5~8所示,一致摆动由于两个翼型之间的相互干扰,会引起阻力增大,升力下降,从而导致整个周期内的升阻比减小,推进效率减小。
[0076]
对称摆动能够也会引起阻力的增大,但同时升力也会增大,且升力增大的幅度大于阻力的增量,从而使整个周期内的升阻比增大,推进效率增大。对称摆动对来流具有一定的挤压和射流作用,从而能够提高推进效率。翼型的对称摆动会产生地效作用(ground effect),从而提高升力减小阻力。
[0077]
为解决单鱼身的滚转问题,分析其原因在于侧向力和摆动部分引起的重力力矩影响显著,故而采用并列双鱼身结构,使其各自鱼尾摆动产生的侧向力相互抵消,减小或避免滚转效应。
[0078]
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。