1.本发明涉及水下机器人定位技术领域,具体涉及一种在充水隧洞等混响严重的有限空间内对水下机器人进行精准定位的系统及方法。
背景技术:
2.引水式水电站在我国的水电站中非常普遍,其借助长距离的输水隧洞将高水头的水体引入发电机组进行发电,是水电站的关键水工结构设施。输水隧洞的混凝土衬砌因长期运行或施工质量因素的影响,往往会出现混凝土裂缝、止水破损、混凝土剥蚀、漏筋、冲蚀、表面附着物和底板磨损等表观缺陷,进而导致衬砌压溃与剥落、衬砌变形、混凝土开裂及内部缺陷,严重的将引起重大事故。目前,水下机器人作业技术在水电站水下工程结构的检测领域得到不断的推广应用,但可靠精确实现水下机器人在长充水隧洞中的定位,实现对作业态势的掌控,定位记录结构缺陷的位置,是水下机器人作业技术在水电水工检测领域发展需要解决的关键技术之一。
3.水下机器人在封闭的充水隧洞中长时间作业时,需要实时监测水下机器人的水下方位,并用于在隧洞缺少位置参照的时候间接测定隧洞结构缺陷的位置,目前水下机器人最常用定位技术主要为水下声定位、基于gps和惯性导航技术、水下视觉定位。
4.通过基于gps和惯性导航技术的导航定位方式在封闭的水下隧洞空间内难以获取卫星信号,且惯导设备长时间工作将导致其误差不断累积,无法提供可靠有效的定位。
5.水下视觉定位是通过摄像头拍摄图像,结合图像处理算法进行定位,因隧洞中可见度低,摄像头拍摄的图像质量差,水下混凝土衬砌无明显的结构差异特征,无法通过该方式对水下机器人进行定位。
6.水下声定位是用水声设备确定水下载体或设备的方位、距离的技术。根据从构成基阵的三个以上声应答器接收到的声脉冲信号到达时间或相位进行定位,但由于隧洞中混响比较严重,并受限于水下载体的结构尺寸,存在作业布放安装困难等因素,现有的水下声定位方法也无法实现水下机器人的定位。
技术实现要素:
7.针对上述问题,发明人提供了一种水下机器人定位系统及方法,能够实现对充水隧洞等混响严重的有限空间内的水下机器人进行精准定位。
8.根据第一方面,本发明提供了一种水下机器人定位系统,包括导引机、与所述导引机信号连接的水下机器人主控台、与所述水下机器人主控台通过脐带缆连接的水下机器人、设置在所述水下机器人上的应答机,所述应答机包括发射换能器和测向换能器,所述导引机通过线缆与导引换能器连接,所述导引换能器位于水中,所述导引换能器分别与发射换能器、测向换能器通过水声进行信号连接;当所述脐带缆完好时,所述系统处于同步模式,当所述脐带缆断裂时,所述系统切换为应答模式。
9.进一步地,所述导引机包括:单片机、与所述单片机连接的信号产生电路、信号调
理电路,所述单片机与水下机器人主控台信号连接,所述信号产生电路和信号调理电路均与所述导引换能器信号连接。
10.根据第二方面,本发明还提供的了一种水下机器人定位方法,包括:导引机、与所述导引机信号连接的水下机器人主控台、与所述水下机器人主控台通过脐带缆连接的水下机器人、设置在所述水下机器人上的应答机,所述应答机包括发射换能器和测向换能器,所述导引机通过线缆与导引换能器连接,所述导引换能器位于水中,所述导引换能器分别与发射换能器、测向换能器信号连接,所述方法包括:同步模式及应答模式,其中,所述同步模式包括:
11.所述导引机按设定的周期通过所述水下机器人主控台向水下机器人发送同步脉冲发射指令,并计时;
12.水下机器人接收到所述同步脉冲发射指令,将所述同步脉冲发射指令传输给所述发射换能器;
13.所述发射换能器接收到所述同步脉冲发射指令后,发射同步脉冲声信号;
14.所述导引机通过所述导引换能器接收所述同步脉冲声信号,并停止计时;
15.根据所述导引机发出同步脉冲发射指令与接收到同步脉冲声信号的时间差确定所述水下机器人与导引换能器的距离;
16.当所述脐带缆断裂时,水下机器人向应答机发送应答方式指令,应答机切换为应答模式,所述应答模式包括:
17.所述导引换能器根据导引机的指令不断发出全向脉冲声信号;
18.所述测向换能器接收所述导引换能器发出的脉冲声信号,并将该脉冲声信号发送给所述应答机;
19.所述应答机根据所述脉冲声信号确定该脉冲声信号的入射方向,并将所述入射方向发送给水下机器人;
20.所述水下机器人根据所述入射方向返航。
21.进一步地,所述水下机器人与导引换能器的距离d=c
×
(t-t)
22.其中,c为声音在水中的传播速度;t为所述导引机发出同步脉冲发射指令与接收到同步脉冲声信号的时间差;t为所述导引机发出同步脉冲发射指令到发射换能器发出同步脉冲声信号的时延。
23.相比现有技术,本发明的有益效果:
24.(1)本发明提供的水下机器人定位系统及方法,具有同步模式与应答模式两种工作方式,通过同步模式对水下机器人进行定位,抗干扰能力强,能够有效避免混响对定位的干扰,实现精准定位,应答模式下水下机器人能够准确返航,避免脐带缆断裂后丢失水下机器人的位置,造成水下机器人返航困难或无法返航。
25.(2)应答机具有结构轻巧、安装方便,对水下机器人负载要求低的特定,易于实施;其导引换能器体积小、重量轻、在作业现场携带方便、布放简单、无须固定安装的显著特点。
26.(3)本发明提供的水下机器人定位系统及方法,在高度封闭的充水隧洞环境下,摆脱了基于gps和惯性导航技术对gps信号的依赖,在水下浑浊、低光照环境下均可实现可靠的定位。
附图说明
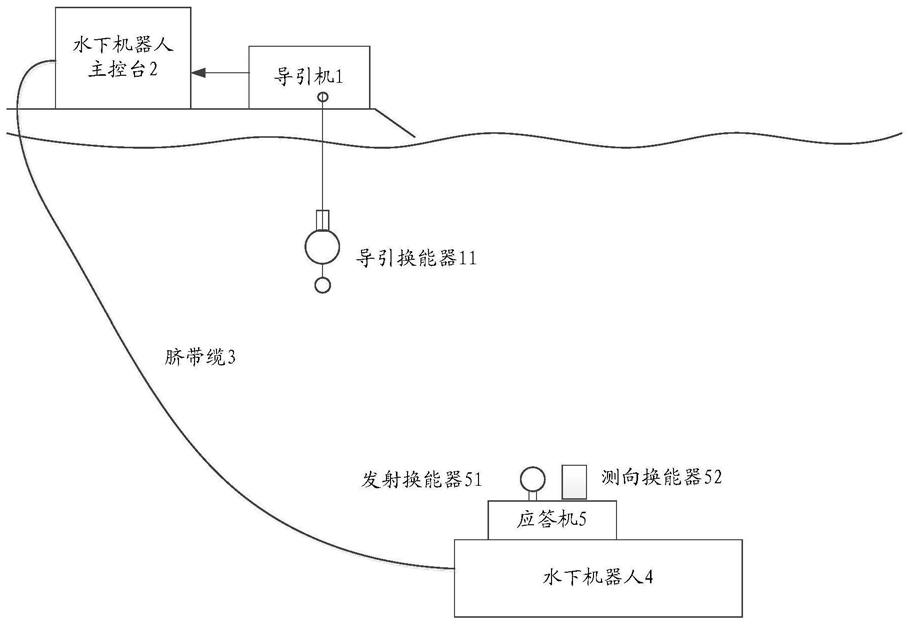
27.图1为实施例1中的水下机器人定位系统的示意图;
28.图2为实施例1中的导引机的原理示意图;
29.图3为实施例1中的应答机的原理示意图;
30.图4为实施例1中的水下机器人定位系统同步模式的工作原理示意图;
31.图5为实施例1中的水下机器人定位系统应答模式的工作原理示意图。
32.附图标记:
33.1-导引机;11-导引换能器;2-水下机器人主控台;3-脐带缆;4-水下机器人;5-应答机;51-发射换能器;52-测向换能器。
具体实施方式
34.下面通过具体实施方式结合附图对本发明作进一步详细说明。
35.实施例1
36.本发明提供了一种水下机器人定位系统,能够对处于充水隧洞等混响严重的有限空间内的水下机器人进行精准定位。具体地,如图1所示,该定位系统包括:放置在岸上或船上的导引机1、与导引机信号连接的水下机器人主控台2、与水下机器人主控台2通过脐带缆3连接的水下机器人4、设置在水下机器人4上的应答机5,导引机1通过信号传输电缆与导引换能器11连接,导引换能器11吊放到水中,用于发射或接收声脉冲信号。如图2所示,导引机1由设置在导引机主机机箱内的单片机、信号产生电路、功率放大电路、信号调理电路和单片机上的a/d采集电路、接插件构成。单片机通过串口分别与水下机器人主控台2、显控计算机连接,通过接插件和信号传输电缆与导引换能器11连接。
37.如图3所示,应答机5由发射换能器51、与发射换能器51连接的信号产生电路、功率放大电路、测向换能器52、与测向换能连接的前置放大器、信号调理电路、a/d电路、dsp电路(数字信号处理电路)组成,dsp电路与水下机器人4通过串口连接。
38.具体地,如图4所示,正常情况下(脐带缆3完好),该系统采用默认工作方式(同步模式)对水下机器人4进行定位:
39.导引机1的单片机按照设定好的周期通过串口向水下机器人主控台2发出同步脉冲发射指令,并开始计时。水下机器人主控台2通过脐带缆3将该指令发送给水下机器人4,水下机器人4又传递给应答机5,应答机5上的信号产生电路产生相应的电信号,经功率放大器放大后由发射换能器51转换为同步脉冲声信号,并向导引换能器11发送该同步脉冲声信号,导引换能器11接收到该信号后,转换为相应的电信号,经过信号调理电路变换为能够被单片机a/d电路采集的数字信号后传送到单片机,导引换能器11接收到同步脉冲声信号时,单片机停止计时,记录下从发出同步脉冲发射指令到接收到同步脉冲声信号这一过程的时间差t,并根据这一时间差计算出水下机器人与导引换能器的距离d=c
×
(t-t),其中,c为声音在水中的传播速度,通常情况下为1500m/s,在实际使用过程中,可根据实际情况来设置,如25℃的海水中,c=1531m/s。t为导引机发出同步脉冲发射指令到发射换能器51发出同步脉冲声信号的时延。水下机器人4与导引换能器11距离的计算结果可通过串口传送给显控计算机进行显示。
40.但脐带缆3断裂时,水下机器人主控台2与水下机器人4断开连接,此时水下机器人
4通过串口向应答机5发送切换为应答模式的指令,应答机5接收到该指令后转为应答模式,在该模式下,水下机器人4根据导引换能器11的位置进行返航,如图5所示,具体为:
41.导引机1的信号产生电路产生电信号,经过功率放大电路放大后传输给导引换能器11,导引换能器11将该电信号转换为全向导引脉冲声信号,由多个具有较强指向性的接收换能器组成的测向换能器52接收来自不同方向的脉冲声信号,由于不同接收换能器接收到的信号的强度比值不同,将信号强度比值与查找表进行对比,就能查询出导引脉冲声信号的具体入射方向(即得到导引换能器11的方位),水下机器人4根据入射方向进行返航。
42.具体地,查找表的制作方法如下:
43.在消声水池按1
°
的分辨率,对水平360
°
方向范围内每个入射方向对应的接收信号强度比值进行校准,通过校准后获得每个入射方向上的接收换能器接收信号的强度比值,记录下每个入射方向上的信号的强度比值即可。
44.以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。