1.本实用新型涉及土木工程技术领域,尤其涉及一种边坡监测装置。
背景技术:
2.边坡指的是一种为保证路基稳定,在路基两侧做成的具有一定坡度的坡面。边坡的稳定性指标十分重要,直接影响到加固效果、公路安全等,所以边坡稳定性的监测必不可少。为了防止边坡因为短时间强降水导致的滑坡、落石和泥石流等灾害,有必要实时监测地面位移。现有技术使用搭载光学相机的飞行器进行航测以测量这种地面位移。然而,当从远距离测量山脉的坡度时精度不够,并且无法在夜间或多云的天气中收集信息。另外,基于人造卫星上的合成孔径雷达系统(sar)虽然精度较高,但是要花费一天的间隔才能用人造卫星观察地面上的同一位置,无法做到实时测量。
技术实现要素:
3.本实用新型目的在于针对现有技术的缺陷,提供用于监测边坡位移的高精度边坡监测装置系统。
4.为解决上述技术问题,本实用新型提供技术方案如下:
5.边坡监测装置,其特征在于:包括激光测距仪、雷达、处理单元和光学反射元件,所述激光测距仪和雷达均和所述处理单元电连接,所述光学反射元件设置在待监测的目标处,所述雷达包括主机和导轨,所述主机设置在所述导轨上并能沿导轨移动,主机上设置发送天线和接收天线,所述发送天线和接收天线用来向光学反射元件发送和接收无线电波,所述激光测距仪用来测量到光学反射元件的距离,激光测距仪和雷达测量到的数据传输到所述处理单元,处理单元将数据处理计算得到目标位移量。
6.进一步的,所述处理单元包括控制单元、存储单元、输入单元和输出单元,所述控制单元内包括校正处理单元和位移计算单元,所述激光测距仪、雷达、存储单元、输入单元和输出单元均和控制单元电连接。
7.进一步的,所述存储单元中包含气象校正信息单元。
8.进一步的,所述控制单元由中央处理器、数字信号处理器和微控制单元构成。
9.进一步的,所述雷达使用频率为12-18ghz,波长1.7-2.4cm的ku波段电磁波。
10.进一步的,光学反射元件是能够反射雷达电磁波信号的金属板、角反射器、平面镜、棱镜中的其中一种。
11.进一步的,所述光学反射元件处设置有gps信号接收器。
12.进一步的,所述存储单元为硬盘或只读存储器。
13.进一步的,所述输入单元为键盘或鼠标。
14.进一步的,所述输出单元为显示器或打印机。
15.与现有技术相比,本实用新型的有益效果是:1、雷达和激光测距仪的相互配合使用,提供了一种在无论白天、黑夜或恶劣天气下都可以监测的高精度测量系统,即使无法看
到目标点也可以监测边坡发生的位移。2、激光测距仪和雷达的安装位置不受地形的限制,既可以安装在同一位置,也可以安装在不同位置,可以提高测量精度。3、存储单元中包含的气象校正信息单元可以进一步校正由于日照程度,温度,大气压力,湿度等变化所带来的测量误差。4、在光学反射元件处设置gps信号接收器可以通过不受天气影响的手段来对目标距离进行测量,作为应急需要。
附图说明
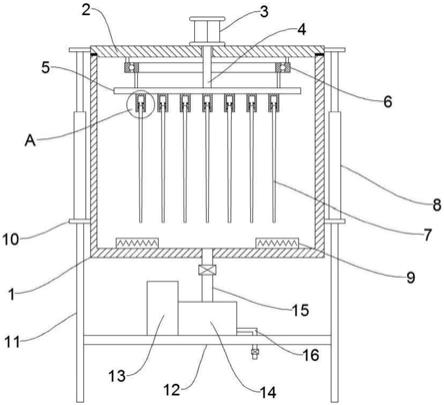
16.图1为本实用新型实施例结构示意图;
17.图2为雷达的结构示意图。
18.其中:1-光学反射元件,2-激光测距仪,4-雷达,6-处理单元,10-控制单元,12-存储单元,14-输入单元,16-输出单元,20-主机,22-导轨,24-发送天线,26-接收天线,30-校正处理单元,32-位移计算单元,40-气象校正信息单元。
具体实施方式
19.为了加深本实用新型的理解,下面我们将结合附图对本实用新型作进一步详述,该实施例仅用于解释本实用新型,并不构成对本实用新型保护范围的限定。
20.图1-2示出了一种边坡监测装置的实施例,包括激光测距仪2、雷达4、处理单元6和光学反射元件,激光测距仪2和雷达4均和处理单元6电连接,光学反射元件1设置在待监测的目标处,雷达4包括主机20和导轨22,主机20设置在导轨22上并能沿导轨22移动,主机20上设置发送天线24和接收天线16,发送天线24和接收天线26用来向光学反射元件1发送和接收无线电波,激光测距仪2用来测量到光学反射元件1的距离,激光测距仪2和雷达4测量到的数据传输到处理单元6,处理单元6将数据处理计算得到目标位移量。
21.优选的,处理单元6包括控制单元10、存储单元12、输入单元14和输出单元16,控制单元10内包括校正处理单元30和位移计算单元32,激光测距仪2、雷达4、存储单元12、输入单元14和输出单元16均和控制单元10电连接。存储单元12中包含气象校正信息单元40。控制单元10由中央处理器、数字信号处理器和微控制单元构成。雷达4使用频率为12-18ghz,波长1.7-2.4cm的ku波段电磁波。光学反射元件1是能够反射雷达电磁波信号的金属板、角反射器、平面镜、棱镜中的其中一种。光学反射元件1处设置有gps信号接收器。存储单元12为硬盘和只读存储器,输入单元14为键盘、鼠标,输出单元16为显示器和打印机。
22.激光测距仪2通过向目标处的光学反射元件1发射和接收激光来测量距离。雷达4的主机20在测量期间沿着导轨22移动,并且在导轨22上的不同位置处向光学反射元件1发送和接收无线电波以实现合成孔径。雷达4需要几分钟的时间移动主机20并完成一次扫描。雷达4并不直接测量距离,而是测量位移量。位移测量的上限根据雷达4发射的无线电波的波长来确定,如果要基于雷达4采集的数据计算距离,要在不超过上限的时间间隔内测量位移量并进行累加。因此,需要将雷达4设置为比激光测距仪2的距离测量更频繁地测量位移量。
23.本实施例的雷达4使用ku波段的电磁波,频率为12-18ghz,波长1.7-2.4cm,从而可以照射到约4km的距离。除此之外,本领域技术人员能够理解,雷达4还可以选择l波段,c波段,x波段,毫米波等频段。
24.如果激光测距仪2和雷达4可以直接看到测量目标区域,则可以远程安装在平坦稳定的地面。激光测距仪2和雷达4可以安装在同一位置,也可以安装在不同的位置。通过将激光测距仪2安装在两个位置并且从不同方向观察目标处的光学反射元件1,可以提高对目标位置测量的精度。
25.控制单元10通过从存储单元12读取程序并执行来控制校正处理单元30和位移计算单元32中的测量值。雷达4发射的电磁波从光学反射元件1处反射,校正处理单元30利用反射波强度的测量值和存储单元12中的气象校正信息单元40来测量激光距离。位移计算单元32基于由校正处理单元30校正的距离测量值和由雷达4测量的位移量或距离,计算光学反射元件1的距离和位移量。存储单元12是诸如硬盘、rom(只读存储器)之类的存储单元,其中的气象校正信息单元40存储有气象校正信息。气象校正信息是用于基于雷达4电磁波的反射波的强度来校正激光测距仪2的距离测量值的信息。气象校正信息是开始对激光测距仪2进行测距值的观测之前的激光测距仪2或雷达4与光学反射元件1之间的距离和来自光学反射元件1的电磁波的反射信号的强度。气象校正信息是通过预先测量大气条件的影响而获得的。
26.输入设备14是键盘、鼠标等,用来操作系统。输出设备16是显示器、打印机等,用于在屏幕上显示测量的光学反射元件1的距离和位移,以通过打印等向用户显示。此外,可以将测量结果作为数据输出,以便可以在另一系统中使用。
27.光学反射元件1反射由激光测距仪2发出的激光和由雷达4发出的电磁波。具体地,将测量光学反射元件1安装在距测量目标点离地面预定高度处。空气的折射率会在温度,压力和湿度等天气影响下发生变化。具体来说,白天的变化、季节性波动和天气差异都会对空气的折射率产生影响。另外,激光测距仪2、雷达4和光学反射元件1之间的相对位置关系(例如,各自的高度)和进行观察的地方的地形也会产生影响。因此,气象校正信息是通过将激光测距仪2、雷达4和光学反射元件1安装在观测地点并通过边坡监测装置进行初步观察而生成的。在初步观察中,通过激光测距仪2测量光学反射元件1的距离,并测量雷达4的反射波的强度。优选在激光测距仪2和雷达4的安装位置记录测量日期和时间,日照程度,温度,大气压力,湿度等。
28.此外,还需要通过不受天气影响的手段来测量光学反射元件1的距离作为参考距离。参考距离使用gps(全球定位系统)来获取。由于gps信号接收器需要电源,因此很难永久安装,只能作为应急措施在有限的时间内通过电池作为电源进行操作。
29.通过将激光测距仪2的距离测量值与参考距离进行比较,可以掌握天气对距离测量值的影响。在雷达4与目标8之间来回的路径中,电磁波会因水蒸气等的吸收/散射而衰减。因此,湿度、雾、云和雨等天气影响会影响电磁波的强度。通过使用获得距离测量值时的距离测量值和反射波的强度,由距离测量值与参考距离之比的值和反射波的衰减率所定义的校正因子r获得a,并且将在初步观察时段中获得的校正率r和衰减率a相关联并存储在存储单元12中的气象校正信息单元40中作为气象校正信息。这里仅r与a相关联,也就是说,r可以被定义为仅依赖于a的函数,但是也可以定义其中r与包括a的多个条件相关联的天气校正信息。例如,除a以外的条件可以包括在激光测距仪2或雷达4的安装位置处的测量时间,日照度,温度,大气压力,湿度等。为了获取反射波的强度,可以使用雷达4多次扫描的平均值。
30.上述实施例的操作方法如下所示:首先使用激光测距仪2和雷达4测量距离和位移量,并且传输给处理单元6。校正处理单元30计算相对于雷达4电磁波的透射强度的反射波的强度,并计算反射波的强度衰减率a。从气象校正信息单元40中读出与衰减率a相对应的校正率r,并且将雷达4的测距值除以r以进行校正。
31.然后,控制单元10中的位移计算单元32进行动作,通过对在前步骤中校正后的距离测量值和通过雷达4进行的位移量进行积分来计算光学反射元件1的距离和位移。
32.当在时刻tn获得激光测距仪2的距离测量值don时,在时刻tn的前后求出位移计算单元32。获取雷达4的距离测量值dr,以计算时间tn的距离drn然后,可以根据测量精度对don和drn进行加权平均,以确定在时间tn处光学反射元件1的距离dn。
33.此外,在直到通过激光测距仪2获得下一个距离测量值do
(n 1)
的时间t
n 1
为止的时间为止,位移计算单元32获得在该时间期间的雷达4的距离测量值。可以输出值dr',该值是通过将dr乘以dn/drn而获得的校正值。
34.当由于夜间或恶劣的天气而无法从激光测距仪2准直测量光学反射元件1的距离时,或者当无法在激光测距仪2与光学反射元件1之间收发激光时,激光测距仪2的距离测量值do可能在相当长的一段时间内不可用。在该时间段内,位移计算单元32也可以基于临时校正距离dr以适当的精度监视地面位移。当重新开始获取激光测距仪2的测距值do时,计算出在精度和连续性方面更适当校正的距离dr例如,将其记录为观察数据。
35.如上所述,通过将激光测距仪2和雷达4的测量结果进行积分,本实用新型可以全天候高精度地监测边坡的位移变化。
36.上述具体实施方式,仅为说明本实用新型的技术构思和结构特征,目的在于让熟悉此项技术的相关人士能够据以实施,但以上内容并不限制本实用新型的保护范围,凡是依据本实用新型的精神实质所作的任何等效变化或修饰,均应落入本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。