1.本实用新型涉及技术领域,特别涉及一种应用于潮汐车道的隔离护栏装置。
背景技术:
2.潮汐车道,又称可变车道,是指城市内部根据早晚交通流量不同情况,对有条件的道路设置一个或多个车辆行驶方向规定随不同时段变化的车道;具体情况为早高峰进城车辆多时,增加进城方向车道数,减少出城方向车道数,晚高峰出城车辆多时,增加出城方向车道数,减少进城方向车道数。
3.目前,我国许多城市都开始采用一种可变车道,将隔离护栏与机器人结合,这样可以根据交通流量的不同情况,通过变换车道的方式组织交通,防止车辆乱转弯、乱入车道,同时也防止行人、非机动车从隔离护栏之间横穿;目前,现有技术中,隔离护栏一般从路口起始端开始设置,终止与另一路口处,变换车道时只需将隔离护栏整体平移即可,而针对部分中间路段的车道变换,仍需具有过渡段隔离,因此,本实用新型研制了一种应用于潮汐车道的隔离护栏装置,以解决现有技术中存在的问题,经检索,未发现与本实用新型相同或相似的技术方案。
技术实现要素:
4.本实用新型目的是:提供一种应用于潮汐车道的隔离护栏装置,以解决现有技术中隔离护栏只适用于整体平移,而无法满足在中间路段的过渡问题。
5.本实用新型的技术方案是:一种应用于潮汐车道的隔离护栏装置,由路口处延伸至马路中间段,并对应将马路划分为潮汐路段、过渡路段及常规路段,包括若干马路机器人、设置在末端的动力输出器、连接相邻马路机器人的固定护栏、以及连接末端的马路机器人与动力输出器的转接护栏;所述马路机器人及固定护栏沿潮汐路段设置,且所述马路机器人可沿垂直于潮汐路段方向往复运动;所述动力输出器及转接护栏设置在过渡路段,且所述动力输出器可沿平行于潮汐路段方向往复运动,所述转接护栏可相对于两侧的马路机器人及动力输出器转动。
6.优选的,所述动力输出器下方配合设置有固定安装的导向座,并实现相对于导向座的滑动,所述导向座采用地脚螺栓与地面固定连接。
7.优选的,所述动力输出器包括底座、中心柱、采用轴承与中心柱连接的旋转柱;所述底座下端两侧设置有滚轮,所述导向座上端面设置有供滚轮沿平行于潮汐路段方向运动的导向槽;所述转接护栏一端与旋转柱外壁固定连接,另一端马路机器人外壁铰接。
8.优选的,处于潮汐路段两端部的所述马路机器人上分别固定安装有指示牌,所述马路机器人及动力输出器上端均安装有指示灯。
9.优选的,所述马路机器人及动力输出器占用的路面宽度为380mm~450mm,相邻所述马路机器人之间的中心距、以及末端马路机器人与动力输出器之间的中心距均控制为4200mm~4500mm。
10.与现有技术相比,本实用新型的优点是:
11.本实用新型主要应用于潮汐路段在不同时段车道的变换,由于结构终止于马路中间段,因此在传统结构中增设了动力输出器及转接护栏,实现潮汐路段与常规路段的过渡;过程中,随着马路机器人的运动,若干固定护栏始终平行运动,转接护栏呈现摆动状,由于动力输出器不沿马路宽度方向运动,因此在转接护栏摆动的情况下会发生沿马路长度方向的运动,因此导向座在其运动过程中起到有效的辅助作用。
附图说明
12.下面结合附图及实施例对本实用新型作进一步描述:
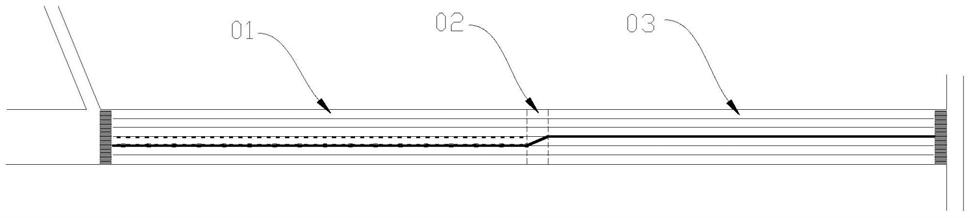
13.图1为本实用新型所述的一种应用于潮汐车道的隔离护栏装置设置于马路上的俯视图;
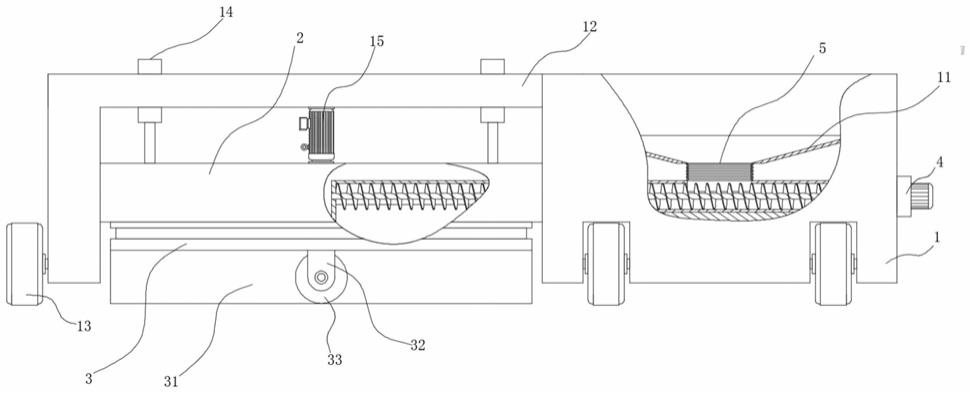
14.图2为本实用新型所述的一种应用于潮汐车道的隔离护栏装置的主视图;
15.图3为本实用新型所述动力输出器的主视图;
16.图4为本实用新型所述的一种应用于潮汐车道的隔离护栏装置的部分结构俯视图。
17.其中:01、潮汐路段,02、过渡路段,03、常规路段;
18.1、马路机器人,11、指示牌,12、指示灯;
19.2、动力输出器,21、导向座,22、导向槽,23、底座,24、滚轮,25、中心柱,26、轴承,27、旋转柱;
20.3、固定护栏;
21.4、转接护栏。
具体实施方式
22.下面结合具体实施例,对本实用新型的内容做进一步的详细说明:
23.如图1所示,一种应用于潮汐车道的隔离护栏装置,由路口处延伸至马路中间段,并对应将马路划分为潮汐路段01、过渡路段02及常规路段03,其具体结构包括若干马路机器人1、设置在末端的动力输出器2、连接相邻马路机器人1的固定护栏3、以及连接末端的马路机器人1与动力输出器2的转接护栏4。
24.具体的,马路机器人1及固定护栏3沿潮汐路段01设置,且马路机器人1可沿垂直于潮汐路段01方向往复运动,进而实现车道的变换;如图2所示,两端部的马路机器人1上分别固定安装有指示牌11,所有马路机器人1上端安装有指示灯12,均用于提醒来往行驶车辆,保证行驶安全。
25.动力输出器2及转接护栏4设置在过渡路段02,且动力输出器2可沿平行于潮汐路段01方向往复运动;如图3所示,动力输出器2下方配合设置有固定安装的导向座21,并实现相对于导向座21的滑动,导向座21采用地脚螺栓与地面固定连接,上端面设置有平行于潮汐路段01方向的导向槽22;动力输出器2包括底座23、中心柱25、采用轴承26与中心柱25连接的旋转柱27、固定在旋转柱27上端的指示灯12;底座23下端两侧设置有滚轮24,该滚轮24设置于导向槽22内,并可沿导向槽22运动;转接护栏4可相对于两侧的马路机器人1及动力输出器2转动,其一端与旋转柱27外壁固定连接,另一端马路机器人1外壁铰接。
26.本实施例中,马路机器人1及动力输出器2占用的路面宽度为380mm~450mm,具体可设定为400mm;相邻马路机器人1之间的中心距、以及末端马路机器人1与动力输出器2之间的中心距均控制为4200mm~4500mm,具体可设定为4400mm。
27.本实用新型工作时,结合图4所示,隔离护栏装置具有两种状态,其一,马路机器人1及动力输出器2处在同一隔离线上;其二,马路机器人1沿马路宽度方向运动,此时若干固定护栏3平行移动,转接护栏4发生摆动,处于导向座21上的动力输出器2沿导向槽22运动,补偿转接护栏4摆动时产生的沿马路行进方向的距离差。
28.上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型,因此无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
技术特征:
1.一种应用于潮汐车道的隔离护栏装置,由路口处延伸至马路中间段,并对应将马路划分为潮汐路段、过渡路段及常规路段,其特征在于:包括若干马路机器人、设置在末端的动力输出器、连接相邻马路机器人的固定护栏、以及连接末端的马路机器人与动力输出器的转接护栏;所述马路机器人及固定护栏沿潮汐路段设置,且所述马路机器人可沿垂直于潮汐路段方向往复运动;所述动力输出器及转接护栏设置在过渡路段,且所述动力输出器可沿平行于潮汐路段方向往复运动,所述转接护栏可相对于两侧的马路机器人及动力输出器转动。2.根据权利要求1所述的一种应用于潮汐车道的隔离护栏装置,其特征在于:所述动力输出器下方配合设置有固定安装的导向座,并实现相对于导向座的滑动,所述导向座采用地脚螺栓与地面固定连接。3.根据权利要求2所述的一种应用于潮汐车道的隔离护栏装置,其特征在于:所述动力输出器包括底座、中心柱、采用轴承与中心柱连接的旋转柱;所述底座下端两侧设置有滚轮,所述导向座上端面设置有供滚轮沿平行于潮汐路段方向运动的导向槽;所述转接护栏一端与旋转柱外壁固定连接,另一端马路机器人外壁铰接。4.根据权利要求1所述的一种应用于潮汐车道的隔离护栏装置,其特征在于:处于潮汐路段两端部的所述马路机器人上分别固定安装有指示牌,所述马路机器人及动力输出器上端均安装有指示灯。5.根据权利要求1所述的一种应用于潮汐车道的隔离护栏装置,其特征在于:所述马路机器人及动力输出器占用的路面宽度为380mm~450mm,相邻所述马路机器人之间的中心距、以及末端马路机器人与动力输出器之间的中心距均控制为4200mm~4500mm。
技术总结
本实用新型涉及一种应用于潮汐车道的隔离护栏装置,包括若干马路机器人、设置在末端的动力输出器、连接相邻马路机器人的固定护栏、以及连接末端的马路机器人与动力输出器的转接护栏;所述马路机器人及固定护栏沿潮汐路段设置,且所述马路机器人可沿垂直于潮汐路段方向往复运动;所述动力输出器及转接护栏设置在过渡路段,且所述动力输出器可沿平行于潮汐路段方向往复运动,所述转接护栏可相对于两侧的马路机器人及动力输出器转动;本实用新型主要应用于潮汐路段在不同时段车道的变换,由于结构终止于马路中间段,因此在传统结构中增设了动力输出器及转接护栏,实现潮汐路段与常规路段的过渡。路段的过渡。路段的过渡。
技术研发人员:马健
受保护的技术使用者:苏州天合智慧信息科技有限公司
技术研发日:2021.09.18
技术公布日:2022/3/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。