1.本实用新型涉及鱼类加工领域,尤其涉及一种鳗鱼自动加工设备。
背景技术:
2.现有技术中有通过钢针和导轨及切割器来处理鳗鱼,该设备可以同时对多条鳗鱼进行处理;还有利用强电流、传送带及导向装置将鳗鱼进行杀死和处理,而且剖背时鳗鱼固定不动,剖背处理效果优异,以及通过导料装置中的送料轮的转动带动鳗鱼往前移动,并从切割刀片上划过,完成鳗鱼下腹的切开,并通过转盘的转动带动刮刀从鳗鱼肚子中转过,完成鳗鱼内脏的去除,整体操作方便。但是现有技术中对鳗鱼的处理结构可靠性不高,机械结构较为繁琐,并且设计的机械结构成本高导致鳗鱼加工设备达不到节省总成本的预期,同时现有的鳗鱼加工效率不高,设备占地面积大,操作移动较为不便。
技术实现要素:
3.基于背景技术存在的问题,本实用新型提出了一种鳗鱼自动加工设备。
4.本实用新型采用了如下方案:一种鳗鱼自动加工设备,包括筛选机构、鳗鱼处理机构、清洗机构以及收集装置,所述筛选机构、鳗鱼处理机构、清洗机构以及收集装置通过输送链按顺序相互连接;所述筛选机构包括鳗鱼大小判断装置、第一电机以及分离板,通过鳗鱼大小判断装置进行鳗鱼大小的判断后通过第一电机驱动分离板实现鳗鱼大小的筛选;所述鳗鱼处理机构包括宰杀机构、破腹机构以及去除内脏机构;所述清洗机构包括成轴对称分布的由两侧向中间出水的出水管道。
5.优选地,所述鳗鱼大小判断装置包括进料口、轨道、挡板、时间传感器以及角位移传感器。
6.优选地,所述宰杀机构包括带红外传感器和钢刺,通过所述红外传感器判断鳗鱼到达预定位置后所述钢刺落下刺入鳗鱼头部进行宰杀;所述破腹机构包括破腹刀片;所述去除内脏机构包括转盘以及旋转刮刀。
7.优选地,所述互道包括第一轨道和第二轨道,所述时间传感器以及角位移传感器位于所述第一轨道中间部分的两侧,所述第一轨道和第二轨道的夹角为165度。
8.优选地,所述第一电机为型号为ys712-4型三相异步电机。
9.优选地,所述输送链链条的型号为20a-1,链轮齿数为17。
10.优选地,所述宰杀机构还包括轴对称分布的夹持机构,所述红外传感器位于所述夹持机构的正上方,所述夹持机构用于固定鳗鱼的头部。
11.优选地,所述所述钢刺和所述破腹刀片均采用304不锈钢。
12.优选地,所述旋转刮刀具有3个关于中心成120度分布的刮脚。
13.优选地,所述轴对称分布的出水管道的出水口之间的距离为150mm。
14.通过采用上述技术方案,本实用新型可以取得以下技术效果:本实用新型提供了一种鳗鱼自动加工设备,设计的机械结构可靠性高,机械结构简单易操作;设计的机械结构
成本低,能够达到节省总成本的预期;具有较高的加工效率,否则在鳗鱼大量上市的情况下能够快速加工鳗鱼;设备占地面积小,操作移动方便。
附图说明
15.为了更清楚地说明本实用新型实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
16.图1是本实用新型的立体示意图1。
17.图2图1的a处的放大示意图。
18.图3是本实用新型的立体示意图2。
19.图4是本发明的加工鳗鱼的流程图。
20.图5是本发明筛选机构的示意图。
21.图6是本发明破腹机构的示意图。
22.图7是本发明去除内脏机构的示意图1。
23.图8是本发明去除内脏机构的示意图2。
24.图9是本发明清洗机构的示意图。
25.图中:1-进料口;2-支撑脚;3-角位移传感器;4-第一电机;5-红外传感器;6-钢刺;7-第二电机;8-出料处;9-传送带;10-去内脏机构;11-清洗机构;12-夹持机构;13-第一轨道;14-第二轨道;15-时间传感器;16
‑ꢀ
破腹刀片;17-转盘;18-旋转刮刀;19-出水管道。
具体实施方式
26.为使本实用新型实施方式的目的、技术方案和优点更加清楚,下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。因此,以下对在附图中提供的本实用新型的实施方式的详细描述并非旨在限制要求保护的本实用新型的范围,而是仅仅表示本实用新型的选定实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
27.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
28.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
29.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
30.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
31.实施例
32.以下仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于下述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。
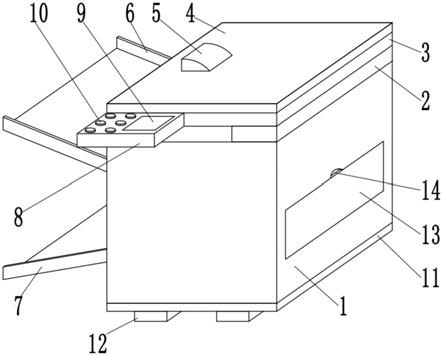
33.参考说明书附图1-3,一种鳗鱼自动加工设备,包括筛选机构、鳗鱼处理机构、清洗机构以及收集装置,所述筛选机构、鳗鱼处理机构、清洗机构以及收集装置通过输送链按顺序相互连接。
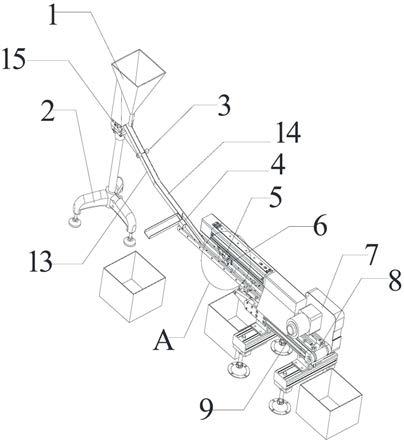
34.参考说明书附图4,为本设备加工鳗鱼的流程图,在本设备中鳗鱼位置可移动,加工装置固定。将鳗鱼放入设备中,鳗鱼通过改变其位置来按照筛选、宰杀、破腹、去除内脏、清洗这五个工序的顺序进行加工,所述五个工序的加工工具固定在相应的工作位置,类似于工厂的流水线模式。
35.参考说明书附图5,本设备的筛选机构是利用角位移传感器3和时间传感器15来测算鳗鱼长度及大小,当鳗鱼沿向下倾斜的轨道运动时,鳗鱼触发位于轨道上的挡板,时间传感器15可以根据公式测算出鳗鱼的长度而角位移传感器可以测算出鳗鱼的大小(宽度),最终达到鳗鱼大小筛选的目的。该筛选机构具体为包括鳗鱼大小判断装置、第一电机4以及分离板,通过鳗鱼大小判断装置进行鳗鱼大小的判断后通过第一电机4驱动分离板实现鳗鱼大小的筛选;所述鳗鱼大小判断装置包括进料口1、轨道、挡板、时间传感器3以及角位移传感器15;所述轨道包括第一轨道13和第二轨道 14,所述时间传感器15以及角位移传感器3位于所述第一轨道中间部分的两侧,所述第一轨道13和第二轨道14的夹角为165度。
36.鳗鱼的宰杀方式通常是人工将鳗鱼头部抓住,然后直接砍掉,再破腹去除内脏,最终留下身子,但鳗鱼的头部富有许多蛋白质及人体所需的氨基酸,是及其富有营养,很多人也视其为珍馐美味,这样去除实在可惜,而且人工处理鳗鱼太过于伤手和费时,为了提高鳗鱼宰杀的效率,采用固定式三角形刀片,鳗鱼会由刺入头部的钢刺带着向前运动,鳗鱼整体会从刀具上划过,从而达到破腹效果。鳗鱼内脏含有脏物,不可食用,故要将其去除,人工去除内脏通常是用手将内脏扯出,较为费时,去除内脏效率不高。为了提高去除效率,减轻劳力,将选用某一简单机械结构来替代人工去除内脏,采用一种可旋转式的刮刀,当鳗鱼运动至指定位置,通过转盘的转动带动刮刀从鳗鱼肚子中转过,完成鳗鱼内脏的去除。因此所述鳗鱼处理机构包括宰杀机构、破腹机构以及去除内脏机构10。
37.所述宰杀机构机构包括红外传感器5和钢刺6,当红外传感器5探测到鳗鱼头部到
达预定位置时,钢刺6落下刺入鳗鱼头部,直接刺断鳗鱼中枢神经将鳗鱼杀死并固定住鳗鱼头部,将鳗鱼带入下一个工位。该钢刺6要刺入鳗鱼,所以需要具有一定的防腐性能和一定的强度以及能够避免污染产品,因此选择材料304不锈钢。所述宰杀机构还包括轴对称分布的夹持机构,所述红外传感器位于所述夹持机构的正上方,所述夹持机构用于固定鳗鱼的头部。
38.所述破腹机构是要将宰杀固定好的鳗鱼腹部割开,以便于后续鳗鱼加工工序的完成。参考说明书附图6,所述破腹机构包括有三角状的破腹刀片 16,当鳗鱼随着钢刺由水平运动时,此时破腹刀片16会鳗鱼从头沿腹部至尾部全部割开,该型破腹机构需有一定的防腐蚀性能,破腹刀片16也需要有一定的锋利性,故材料上选择防腐蚀性能较好、硬度较高的304不锈钢,可以确保鳗鱼的破腹效果和水产加工品的安全性。
39.鳗鱼在宰杀跟破腹过后,需要将鳗鱼体内的内脏清除干净,采用一种可旋转式的刮刀。因此,所述去除内脏机构10包括转盘17以及旋转刮刀 18;当鳗鱼运动至指定位置,通过转盘17的转动带动旋转刮刀18从鳗鱼肚子中转过,完成鳗鱼内脏的去除。参考说明书附图7-8,所述旋转刮刀 18具有3个关于中心成120度分布的刮脚。该机构能刮除内脏,需要由一定的强度,避免污染食品,需具有防锈性能。因此选择材料304不锈钢,以此保证刮刀强度和产品安全性。
40.由于宰杀、去除内脏后鳗鱼整体会有残留的血液和杂质,所以需要用清水将鳗鱼冲洗干净,人工通常是将处理好的鳗鱼直接用水龙头冲洗,效率不高而且浪费水资源,为了提高效率,采用射水流由两侧向中间对鳗鱼进行冲洗,可以冲洗地更加干净。因此,所述清洗机构包括成轴对称分布的由两侧向中间出水的出水管道19。为了更加有效地去除杂质,故设计出了说明书附图9所示的清洗机构。该型清洗机构由两侧向中间对鳗鱼进行冲水清洗,通过较快的射水流将残余的血液和杂质冲洗下来。根据先前测到的鳗鱼体的相关数据,设定两出水口之间的距离=150mm。为了保障水产食品的安全性,考虑到降低设备成本,故材料上选择尼龙。
41.根据有润滑的工作条件,预估滚子的直径小于65mm,查表1,取f1=0.16。查设计手册得输送链张力的计算方法。
42.计算因输送鳗鱼的所需的链条张力:
[0043][0044]
计算为输送鳗鱼钢板所需的链条张力:
[0045][0046]
计算使链条自身转动所需的链条张力:
[0047]
试选20a链条的质量:3.91kg/m
[0048][0049]
鳗鱼自动化加工设备工作时链条承受的最大张力:
[0050]fmax
=t1 t2 t3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0051]
式中:m——单位长度载荷的质量(kg/m);m1——钢板单位长度质量 (kg/m):
m2——链条以及附件单位长度质量(kg/m);l—链轮中心距(m); f1——链条与轨道之间摩擦系数;g——重力加速度取9.8m/s;t1——输送负载时链条所需张力(kn);t2——输送夹持机构时链条所需张力(kn);t3——链条自身转动所需张力(kn);经计算得:f≈1.2kn。
[0052][0053]
表1链条与轨道之间的摩擦系数f1[0054]
综合考虑现实使用情况跟环境、静强度、磨损等工况因素,选取链条型号为20a-1,链轮齿数为17。
[0055]
鳗鱼自动加工设备在运行过程中,链条因张力而发生弹性变形。从链轮到输送链的力以一定的速度逐渐传递到链条上,所以整个输送链的速度是不一样的。参与加速运动的链的质量只是链和负载的一部分,这是输送链自由振动的原因。
[0056]
当外部激励频率接近或等于链的固有频率时,鳗鱼自动加工设备的传动链会产生共振现象。由于共振,链条张力会增大,严重时会损坏输送链,影响鳗鱼自动加工设备的正常运行。因此,有必要对链条的共振现象进行分析,找出产生共振的原因。
[0057]
(1)鳗鱼自动化加工设备输送链条强迫振动的扰动频率
[0058]
鳗鱼自动化加工设备输送链所受链轮带来的扰动力主要是是周期性变化,影响扰动频率因素种类众多,主要有链轮的角速度、齿数等。当链轮的转速为ω/2π,链轮齿数为z时,扰动周期为:
[0059][0060]
扰动频率:
[0061][0062]
(2)弹性波速度
[0063]
加工输送过程中,载重部分与空载部分参与的单位长度质量为:
[0064]
qc=q0 ξ
×qꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0065]
qc=q0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0066]
其中:q0——单位长度夹持机构、链条与附件质量;q——单位长度载荷的质量;ξ——周期运动系数,取0.3~o.5;
[0067]
输送链条受到周期性变化的扰动力后,链条的弹性变形在截面上依次传递下去,传递的速度设为v,链条的弹性变形沿着弹性波方向传递。
[0068][0069]
式中:ε——链条弹性应变;
[0070]
输送链单位长度变化值:
[0071]
δqc=q
c-q'c≈εqcꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0072]
在δt时间段,自动化加工设备输送链发生变形的长度为:
[0073]
δl=vδt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0074]
所承载的质量:
[0075]
δm=δlqc=vδtεqcꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0076]
根据动量定理可知:
[0077]
δmv=v2δtεqcꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0078]
输送链的刚度:
[0079][0080]
因此弹性力为:
[0081]
s=εe0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0082]
所以弹性力冲量为:
[0083]
sδt=εe0δt
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0084]
整理前面的公式可得链条的弹性变形传递速度为:
[0085][0086]
负载时链条弹性变形的传递速度为:
[0087][0088]
空载时链条弹性变形的传递速度为:
[0089][0090]
因此弹性波的平均传播时间为:
[0091][0092]
式中:l一鳗鱼自动化加工设备输送链条的铺设长度;
[0093]
弹性波平均传播速度:
[0094][0095]
(3)链的共振速度和共振长度
[0096]
链的固定振动频率为:
[0097]
[0098]
式中i取值为1,2,3等的正整数;
[0099]
令δ=δi:
[0100][0101][0102]
所以输送链的共振速度为:
[0103][0104]
输送链的共振长度为:
[0105][0106]
据上述公式分析可知,鳗鱼自动加工设备输送链的弹性振动主要由两种振动组成,即自由振动和强迫振动。当两者的振动频率越来越接近时,输送链会产生共振,导致链条受到很大的张力甚至对链条造成损坏,这将影响鳗鱼自动加工设备的正常运行。为了避免输送链的共振现象,输送链在运行过程中产生的外部激励频率应尽量避开其固有频率。根据上述计算和分析,链速应避开共振速度,链长度应避开共振长度。
[0107]
考虑设备的实际使用情况,选取输送链、去腮机构、切割机构的驱动机为电动机。
[0108]
(1)驱动输送链的主电机
[0109]
设定该型鳗鱼自动化加工设备加工处理鳗鱼的能力为15只/mi n,输送链的转速约为5r/mi n。链速公式为:
[0110][0111]
式中:v——链速:z1——主动链轮齿数;p——链轮的节距;n1——主动轮的转速;z1=17,p=31.75mm,可得v=0.045m/s。
[0112][0113]
根据上文得知:f=1.2kn,可得p=0.054kw,查机械设计手册,选取功率为0.37kw,型号为ys712-4型三相异步电机。同理:宰杀装置和去除内脏装置的电机与上同样采用ys712-4型三相异步电机,而分离板的电机则采用功率较小为0.18kw,ys632-4型号三相异步电机。
[0114]
本实用新型是一种能自动完成对鳗鱼的大小筛选、宰杀、破腹、去除内脏、清洗的水产品加工设备。按照以下三点原则进行设计,是为了更好的确保此设备的可靠性。
[0115]
(1)符合国家相关食品机械设计制造安全标准的原则。由于该型设备是用于加工水产品,材料方面需要有一定的防腐蚀性能,不能污染水产加工品,并且不能有毒性,需保证水产品的安全性。
[0116]
(2)满足水产企业实际需求的原则。每只鳗鱼的长度是不一致的,不管生长在自然水域还是人工养殖下的鳗鱼都大小不均,加工设备要尽可能的满足一定范围内鳗鱼的大小长度。当前对日本鳗的加工在水产企业占比较高,加工设备要尽可能适应日本鳗的加工。因
此,为了保证加工设备的可靠性和生产效率,可以通过适应生产车间的应用环境,满足水产企业关于加工过程的需求这两者来验证,方可体现加工设备的高生产效率和高可靠性。
[0117]
(3)采用柔性设计的原则。关于加工设备的机械结构参数和关键机械结构的位置都可根据具体情况进行适当的调整以满足企业的需要。由于当前对此设备的研究处于初步阶段,还有很多尚未考虑到的因素,后续可能需要进行进一步地调整和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。