1.本实用新型涉及进料装置领域,特别涉及人形机器人底盘。
背景技术:
2.机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。
3.对于自主导航的机器人来说,因为机器人是我们人事前编程好的程序去让机器执行,但是机器是没有眼睛的,这样机器就不知道避让遮挡物,趋避危险,这样我们在制作机器人的时候就需要在机器人的底座上安装大量的传感器去检测周围的环境,然后通过信号处理器将数据处理好,传递给控制器,控制器再做出相应的举动,实现机器人的自主导航移动,但是现有的机器人在在遇到透明的物体的时候很难检测到距离,这样就是的机器人很容易就会发生碰撞,在现有的机器人底座往往都是两个轮子加一个万向轮辅助,这样就使得机器人的平衡型不稳定,以及机器人都没有保护措施,这样就会使得机器人在发生碰撞的时候容易损坏。
技术实现要素:
4.本实用新型的主要目的在于提供人形机器人底盘,可以有效解决背景技术中的问题。
5.为实现上述目的,本实用新型采取的技术方案为:
6.人形机器人底盘,包括底盘主体,所述底盘主体底部设置有底部滚轮,所述底盘主体上在位于底部滚轮的外侧位置设置有环形橡胶圈,所述底盘主体的侧面位置设置有若干个侧面安装管,所述侧面安装管内设置有侧面伸缩杆,所述侧面伸缩杆的外侧端设置有内侧弧形杆,所述内侧弧形杆的两端设置有侧面连接杆,所述侧面连接杆的另一端设置有外侧弧形橡胶杆,所述侧面安装管内部底面位置设置有内部滑动板,所述侧面安装管内在位于内部滑动板的上方位置设置有内部滑动杆,所述底盘主体的上方位置设置有上部连接杆,所述侧面伸缩杆的底面对应内部滑动板的位置设置有板型活动槽,所述侧面伸缩杆的底面在位于板型活动槽的上方位置设置有圆形活动槽。
7.优选的,所述板型活动槽与圆形活动槽的长度相同,且板型活动槽和圆形活动槽相互连通。
8.优选的,所述内部滑动板活动安装在板型活动槽,所述内部滑动杆活动安装在圆形活动槽。
9.优选的,所述侧面安装管、侧面伸缩杆、内侧弧形杆和外侧弧形橡胶杆的数量均为三个。
10.优选的,所述内侧弧形杆上对应侧面连接杆的位置设置有侧面通孔,所述侧面连接杆活动安装在侧面通孔内,所述侧面连接杆上设置有侧面弹簧,所述侧面弹簧位于内侧
弧形杆和外侧弧形橡胶杆之间位置,所述侧面连接杆的内侧端设置有防脱帽头,且防脱帽头位于内侧弧形杆的侧面位置。
11.优选的,所述侧面安装管的外端侧面位置设置有螺孔,且该螺孔活动安装有侧面螺栓,所述侧面伸缩杆的侧面对应侧面螺栓的位置设置有若干个侧面螺孔,且侧面螺孔等距离分布排列。
12.与现有技术相比,本实用新型具有如下有益效果:
13.本实用新型中,通过设置的内侧弧形杆和外侧弧形橡胶杆等结构,在底盘主体外侧形成一个保护杆,当发生碰撞的时候,外侧弧形橡胶杆向内移动,侧面弹簧进行压缩,从而缓冲部分撞击力,且避免底盘主体之间发生接触碰撞,尽可能的减少碰撞中底盘主体发生损坏的可能性,且通过侧面伸缩杆等结构,能够活动调节内侧弧形杆和外侧弧形橡胶杆的距离,从而便于用户自我调节,使用更为灵活,底部设置的环形橡胶圈,能够一定程度上将底部滚轮移动过程中的部分固体阻挡物推开,避免其影响底部滚轮进行移动。
附图说明
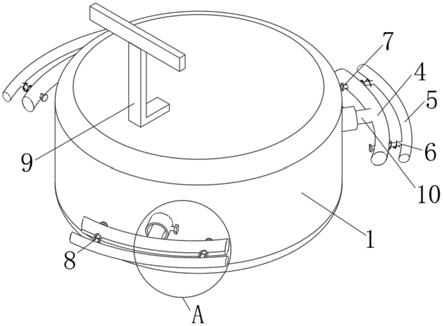
14.图1为本实用新型的整体结构示意图;
15.图2为本实用新型的整体倒立结构示意图;
16.图3为图1中a处的放大图;
17.图4为本实用新型的侧面安装管的结构示意图;
18.图5为本实用新型的侧面伸缩杆的结构示意图。
19.图中:1、底盘主体;2、底部滚轮;3、环形橡胶圈;4、内侧弧形杆;5、外侧弧形橡胶杆;6、侧面连接杆;7、防脱帽头;8、侧面弹簧;9、上部连接杆;10、侧面伸缩杆;11、侧面通孔;12、侧面安装管;13、侧面螺栓;14、内部滑动板;15、内部滑动杆;16、板型活动槽;17、圆形活动槽;18、侧面螺孔。
具体实施方式
20.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
21.如图1-5所示,人形机器人底盘,包括底盘主体1,底盘主体1底部设置有底部滚轮2,底盘主体1上在位于底部滚轮2的外侧位置设置有环形橡胶圈3,底盘主体1的侧面位置设置有若干个侧面安装管12,侧面安装管12内设置有侧面伸缩杆10,侧面伸缩杆10的外侧端设置有内侧弧形杆4,内侧弧形杆4的两端设置有侧面连接杆6,侧面连接杆6的另一端设置有外侧弧形橡胶杆5,侧面安装管12内部底面位置设置有内部滑动板14,侧面安装管12内在位于内部滑动板14的上方位置设置有内部滑动杆15,底盘主体1的上方位置设置有上部连接杆9,侧面伸缩杆10的底面对应内部滑动板14的位置设置有板型活动槽16,侧面伸缩杆10的底面在位于板型活动槽16的上方位置设置有圆形活动槽17。
22.在本实施例中,为了便于板型活动槽16和圆形活动槽17组合起来使用,板型活动槽16与圆形活动槽17的长度相同,且板型活动槽16和圆形活动槽17相互连通。
23.在本实施例中,为了便于活动安装内部滑动板14和内部滑动杆15,内部滑动板14活动安装在板型活动槽16,内部滑动杆15活动安装在圆形活动槽17。
24.在本实施例中,为了便于从三个方面防护底盘主体1,侧面安装管12、侧面伸缩杆10、内侧弧形杆4和外侧弧形橡胶杆5的数量均为三个。
25.在本实施例中,为了便于外侧弧形橡胶杆5向内移动,能够进行缓冲,内侧弧形杆4上对应侧面连接杆6的位置设置有侧面通孔11,侧面连接杆6活动安装在侧面通孔11内,侧面连接杆6上设置有侧面弹簧8,侧面弹簧8位于内侧弧形杆4和外侧弧形橡胶杆5之间位置,侧面连接杆6的内侧端设置有防脱帽头7,且防脱帽头7位于内侧弧形杆4的侧面位置。
26.此外,侧面安装管12的外端侧面位置设置有螺孔,且该螺孔活动安装有侧面螺栓13,侧面伸缩杆10的侧面对应侧面螺栓13的位置设置有若干个侧面螺孔18,且侧面螺孔18等距离分布排列,为了便于调节侧面伸缩杆10。
27.需要说明的是,本实用新型为人形机器人底盘,当底盘主体1发生碰撞时,侧面外侧弧形橡胶杆5碰触的物体后向内移动,使得侧面连接杆6同步向内移动,使得侧面连接杆6上的侧面弹簧8受到压力,开始被移动的外侧弧形橡胶杆5进行压缩,通过侧面弹簧8的压缩,对撞击力进行部分缓冲,避免底盘主体1距离震动,且当用户需要调节内侧弧形杆4和外侧弧形橡胶杆5的距离位置的时,通过拧动侧面螺栓13,将侧面螺栓13取下,然后向外抽动侧面伸缩杆10,侧面伸缩杆10通过板型活动槽16、圆形活动槽17在侧面安装管12的内部滑动板14、内部滑动杆15上进行移动,当移动到合适的位置时,将侧面螺栓13拧入,卡入侧面伸缩杆10上对应位置的侧面螺孔18内,从而将侧面伸缩杆10固定住,通过该结构,便于用户自我调节距离,灵活使用,通过设置的环形橡胶圈3等结构,便于推开部分地面上的阻挡物,防止影响底部滚轮2移动。
28.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。仅为本实用新型的较佳实施例,其描述较为具体和详细,但并不能因此而理解为本实用新型的范围限制,本行业的技术人员应该了解,本实用新型不受上述实施例的限制,在不脱离本实用新型的原理和宗旨下可以对实施例进行多种变化、修改、替换和变形,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
