1.本实用新型涉及起重机检测技术领域,具体是涉及一种起重机主梁形变安全检测装置。
背景技术:
2.随着经济高速发展,起重机械被广泛应用于各种物料的起重、运输、装卸等生产活动中,是一种现代工业生产不可缺少的设备,但是由于使用负载量大等,随着长期使用运行,起重机主梁形变而导致的故障也日益增加,这不仅影响到正常的生产活动,严重时将引发重大生产事故,威胁到人们的生命安全。所以,起重机械定期需要进行检验,如:塔式起重机、升降机、流动式起重机,每年1次,桥式起重机、门式起重机、门座式起重机、缆索式起重机、桅杆式起重机、机械式停车设备,每2年一次,其中涉及吊运熔融金属的起重机,每年1次。
3.目前针对起重机主梁形变检测,大多仍采用人工手持设备等方式进行形变检测,但由于起重机主梁位置高度等条件下,人工作业风险大,难度高,同时,也有采用现有检测装置进行起重机主梁形变检测,但其也仅限于在起重机主梁顶面进行检测等操作,难以对起重机主梁的多个侧面进行形变检测;因此,现需要一种有效解决上述问题的检测装置,以自行检查起重机主梁的形变等检测工作。
技术实现要素:
4.为解决上述技术问题,本实用新型提供了一种起重机主梁形变安全检测装置。
5.本实用新型的技术方案是:一种起重机主梁形变安全检测装置,包括:用于装载各构件的框体,用于驱动框体移动的前轮组件以及用于增强框体移动稳定性的导板,所述框体底部中空;
6.所述前轮组件为多组并排卡接的磁块转轮所组成的磁转轮组,所述磁块转轮上周向设有若干组活动磁块,所述活动磁块与磁块转轮上配设有的沉槽滑动配合,且活动磁块与沉槽内底面通过弹簧连接,位于前轮组件对应位置处的框体前端左右两侧各设有一个用于连接前轮组件的延伸板,两组所述延伸板分别设有用于与磁转轮组一端转动卡接的螺纹调节杆、以及与磁转轮组另一端卡接的驱动杆,位于所述驱动杆一侧的延伸板上设有驱动电机,所述驱动电机通过输出轴与驱动杆连接,
7.所述导板为磁性板件,其下底面设有若干组滚珠,导板左右两端分别通过转轴与框体后端左右两侧的延伸板进行转动连接,位于前轮组件与导板之间的框体底部内水平设有用于搭载检测组件的载板。
8.进一步地,所述框体上顶面呈类蛋壳结构,其上顶面以及左右侧面均设有用于缓冲坠落碰撞的气囊。通过类蛋壳结构设计可以提高框体意外中落的抗冲击强度,同时配设有多组气囊可以进一步防止意外坠落对装置造成损害。
9.进一步地,所述磁转轮组的各个相邻磁块转轮均相互交错角度设置。通过交错角
度的设置,能够使相邻两组磁块转轮在任意转动位置时均有活动磁块与起重机主梁进行磁吸吸附,从而提高磁转轮组的驱动效果。
10.进一步地,所述磁块转轮两侧侧面分别设有用于相邻磁块转轮卡接的十字形凸块、十字形凹槽,所述螺纹调节杆端面的转动块、驱动杆端面设有用于与磁块转轮对应卡接的十字形凸块、十字形凹槽。通过十字形凸块、十字形凹槽进行相互卡接,结构简单且连接强度高。
11.进一步地,所述螺纹调节杆与延伸板螺纹连接,且螺纹调节杆外端面设有用于转动的旋钮。通过螺纹调节杆的调节控制可以加装或减少磁块转轮的设置数量,并且也便于对磁块转轮进行更换维修等操作。
12.进一步地,所述活动磁块的外端面设有用于增大与起重机主梁接触面的类弧形磁片。通过类弧形磁片的设置,能够有效增强活动磁块与起重机主梁的磁吸效果,从而提高前轮组件的驱动效果。
13.作为本实用新型的一种技术方案,所述检测组件为四组距离测定杆,四组所述距离测定杆分别设置在载板的四个边角处,距离测定杆包括支架、活动接触块以及直线位移传感器,所述直线位移传感器设于支架底部的空腔内,并通过其上端连接的触发杆穿过支架中部管体与活动接触块底面连接,所述活动接触块通过若干组弹簧杆与支架上端法兰环连接,所述活动接触块与起重机主梁接触一侧端面设有滚珠。通过直线位移传感器以及距离测定杆其余构件的配合,能够有效方便的测定载板至起重机主梁之间的距离,并根据不同位置与起重机主梁的测定距离分析起重机主梁是否形变等。
14.作为本实用新型的另一种技术方案,所述检测组件为四组红外线测距传感器,四组所述红外线测距传感器分别设置在载板的四个边角处。通过红外线测距传感器能够有效方便的测定载板至起重机主梁之间的距离,并根据不同位置与起重机主梁的测定距离分析起重机主梁是否形变等。
15.本实用新型的有益效果是:
16.(1)本实用新型的起重机主梁形变安全检测装置,能够针对起重机主梁的不同侧面进行形变等的检测工作,并且无需人工检测作用,其具有操作简单,稳定性好,安全性高的优点。
17.(2)本实用新型的起重机主梁形变安全检测装置,其利用磁转轮组进行磁吸及驱动,能够满足在起重机主梁形变检测中的位移驱动工作,并且采用拼组式构组,便于进行检修更换、加装等操作。
附图说明
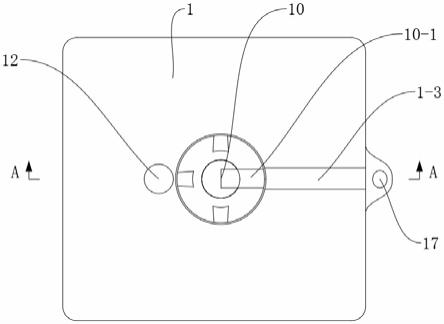
18.图1是本实用新型实施例1的整体结构示意图。
19.图2是本实用新型实施例1的整体底部结构示意图。
20.图3是本实用新型实施例1的距离测定杆结构示意图。
21.图4是本实用新型实施例2的整体结构示意图。
22.图5是本实用新型实施例2的整体底部结构示意图。
23.图6是本实用新型框体的底部结构示意图。
24.图7是本实用新型磁块转轮的结构示意图。
25.其中,1-框体、11-延伸板、12-螺纹调节杆、13-驱动杆、14-载板、15-气囊、2-前轮组件、21-磁块转轮、211-活动磁块、212-沉槽、213-弹簧、214-类弧形磁片、3-导板、4-检测组件、41-距离测定杆、42-支架、43-活动接触块、44-直线位移传感器、45-触发杆、46-弹簧杆、47-红外线测距传感器、5-驱动电机。
具体实施方式
26.下面结合具体实施方式来对本实用新型进行更进一步详细的说明,以更好地体现本实用新型的优势。
27.实施例1
28.一种起重机主梁形变安全检测装置,包括:用于装载各构件的框体1,用于驱动框体1移动的前轮组件2以及用于增强框体1移动稳定性的导板3,框体1底部中空;框体1上顶面呈类蛋壳结构,其上顶面以及左右侧面均设有用于缓冲坠落碰撞的气囊15,通过类蛋壳结构设计可以提高框体1意外中落的抗冲击强度,同时配设有多组气囊15可以进一步防止意外坠落对装置造成损害;
29.前轮组件2为10组并排卡接的磁块转轮21所组成的磁转轮组,磁转轮组的各个相邻磁块转轮21均相互交错角度7.5
°
设置,通过交错角度的设置,能够使相邻两组磁块转轮21在任意转动位置时均有活动磁块211与起重机主梁进行磁吸吸附,从而提高磁转轮组的驱动效果,磁块转轮21两侧侧面分别设有用于相邻磁块转轮21卡接的十字形凸块、十字形凹槽,
30.磁块转轮21上周向设有24组活动磁块211,活动磁块211的外端面设有用于增大与起重机主梁接触面的类弧形磁片214,通过类弧形磁片214的设置,能够有效增强活动磁块211与起重机主梁的磁吸效果,从而提高前轮组件2的驱动效果,活动磁块211与磁块转轮21上配设有的沉槽212滑动配合,且活动磁块211与沉槽212内底面通过弹簧213连接,
31.位于前轮组件2对应位置处的框体1前端左右两侧各设有一个用于连接前轮组件2的延伸板11,两组延伸板11分别设有用于与磁转轮组一端转动卡接的螺纹调节杆12、以及与磁转轮组另一端卡接的驱动杆13,位于驱动杆13一侧的延伸板11上设有驱动电机5,驱动电机5通过输出轴与驱动杆13连接,驱动电机5选用市售驱动电机或对其进行外形调整以适配安装于本装置,螺纹调节杆12端面的转动块、驱动杆13端面设有用于与磁块转轮21对应卡接的十字形凸块、十字形凹槽,通过十字形凸块、十字形凹槽进行相互卡接,结构简单且连接强度高,螺纹调节杆12与延伸板11螺纹连接,且螺纹调节杆12外端面设有用于转动的旋钮,通过螺纹调节杆12的调节控制可以加装或减少磁块转轮21的设置数量,并且也便于对磁块转轮21进行更换维修等操作,
32.导板3为磁性板件,其下底面设有若干组滚珠,导板3左右两端分别通过转轴与框体1后端左右两侧的延伸板11进行转动连接,位于前轮组件2与导板 3之间的框体1底部内水平设有用于搭载检测组件4的载板14,
33.检测组件4为四组距离测定杆41,四组距离测定杆41分别设置在载板14 的四个边角处,距离测定杆41包括支架42、活动接触块43以及直线位移传感器44,直线位移传感器44选用上海希敏自动化设备有限公司xm-d13电阻式带回弹位移传感器,直线位移传感器44设于支架42底部的空腔内,并通过其上端连接的触发杆45穿过支架42中部管体与活动接触块
43底面连接,活动接触块43通过若干组弹簧杆46与支架42上端法兰环连接,活动接触块43与起重机主梁接触一侧端面设有滚珠。通过直线位移传感器44以及距离测定杆41其余构件的配合,能够有效方便的测定载板14至起重机主梁之间的距离,并根据不同位置与起重机主梁的测定距离分析起重机主梁是否形变等。
34.上述起重机主梁形变安全检测装置的工作方法为:
35.将本装置磁吸吸附在待检测的起重机主梁侧面,随后遥控板等远程启动驱动电机5,使其驱动驱动杆13转动,进而使其带动前轮组件2的磁转轮组进行转动,期间通过各个磁块转轮21的活动磁块211对起重机主梁进行磁吸,并且通过弹簧213等构件作用使磁块转轮21进行差量补偿,从而保持时刻稳定的磁吸效果,避免因为局部高低不平造成,磁吸不稳等情况,运动期间通过导板3 进行辅助磁吸稳固,避免在行进过程中磁吸不稳造成脱落的问题,
36.在起重机主梁侧面移动的过程中,通过直线位移传感器44以及距离测定杆 41其余构件的配合,能够有效方便的测定载板14至起重机主梁之间的距离,并根据不同位置与起重机主梁的测定距离分析起重机主梁是否形变等,
37.当需要进行更换磁块转轮21或调整磁块转轮21的数量时,操纵螺纹调节杆12使其放松对磁转轮组的夹持,从而取放或更换部分磁块转轮21。
38.实施例2
39.本实施例与实施例1基本相同,与其不同之处在于,检测组件4为四组红外线测距传感器47,红外线测距传感器47选用基恩士cmos激光位移传感器,四组红外线测距传感器47分别设置在载板14的四个边角处。通过红外线测距传感器47能够有效方便的测定载板14至起重机主梁之间的距离,并根据不同位置与起重机主梁的测定距离分析起重机主梁是否形变等。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。