1.本实用新型涉及光学测距领域,尤其涉及激光雷达。
背景技术:
2.激光雷达是通过发射激光,并探测激光到达物体表面后反射的回波信号来计算物体距离的探测设备。测距性能是激光雷达的一项重要技术指标,其主要取决于激光雷达系统的信噪比水平,而环境光是影响激光雷达信噪比水平的一个重要噪声来源,因此减小环境光一直是激光雷达的光学系统设计中的重要环节。
3.目前的激光雷达的光学系统的抑制环境光的方式主要有两个方面:
4.一方面,需要设置合适的接收端(即探测器一侧)的光学系统焦距。具体是因为接收端光学系统焦距需要与发射焦距、激光器、光探测器有效尺寸相匹配。此外,光学系统焦距的长短会对激光雷达的总体积有较大影响。因此,无论是机械式雷达还是固态式雷达,目前大部分接收端光学系统焦距多在100mm以内。
5.比如,硅光电倍增管(sipm)在强环境光条件下容易饱和。通常需要限制sipm的视场角,以避免接收到更多的环境光。但是,这会产生矛盾。比如在接收端光学系统中,使用大尺寸的探测器且又要压缩到小视场角,则需要长焦距的光学系统;然而,采用长焦距的光学系统又不利于实现结构紧凑、体积小的激光雷达。
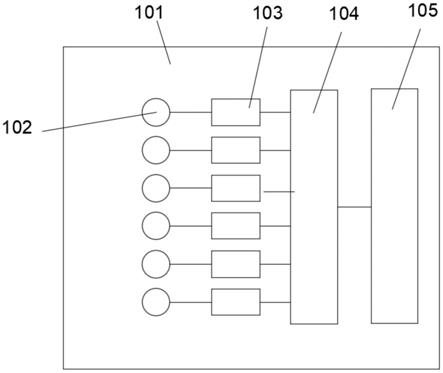
6.根据图1进行说明,图1中所展示探测器101的高度为l,f为接收透镜102(等效示意为凸透镜)焦距,θ为视场角。需说明的是,此处的视场角为瞬时视场角(instantaneous fieldofview,ifov),是指单个光探测器的受光角度或观测视野。可以得到视场角的计算公式为从该公式可见,如果采用大感光面的探测器101(比如采用sipm时),高度l会较大,而为了限制探测器101的视场角θ,以避免接收到更多环境光而使探测器101 饱和,那就需要增大接收端光学系统的焦距f。
7.为解决这一问题,如图2所示,现有技术中有通过在接收端光学系统中增加孔径光阑203 来抑制环境光。具体可如图中所示,通过在接收透镜202与探测器201之间设置孔径光阑203,孔径光阑203位于接收透镜202的焦点位置,并且使经过孔径光阑203的光覆盖探测器201 的全部有效区域(图中以覆盖高度l为示例)。从图中可见,通过孔径光阑203使与其所对应的视场角θ’内对应的光通过,而使其它视场角的光被阻挡,使得探测器201实际的视场角从θ压缩到θ’,且孔径光阑203使得经过的光覆盖探测器201全部有效区域,以达到长焦距光学系统的效果。
8.但是,对于激光雷达而言,孔径光阑属于需要额外增加的光学部件,一方面增加了额外的成本,另一方面也增加了安装与调试工作。
9.另一方面,有采用与激光波长对应的滤光片,以通过压缩滤光片带宽来对激光波长以外的环境光进行过滤。但滤光片的带宽受到激光器带宽、工作环境温度等因素影响。对于当前大部分选用半导体激光器作为光源的激光雷达来说,其滤光片带宽进一步压缩的空间较为有限,环境光仍无法控制到理想水平。
技术实现要素:
10.鉴于以上所述现有技术的缺点,本实用新型提供一种激光雷达,抑制环境光对探测器的影响、提高激光雷达探测时的动态范围,提高激光雷达的测距能力。
11.为实现上述目标及其他相关目标,本实用新型第一方面提供一种激光雷达,包括:光发射单元,用于发射探测光信号;光接收单元,用于接收由所述探测光信号产生的回波光信号;主光学系统,配置在光发射单元和光接收单元之间,用于接收所述探测光信号并向外传输;以及,用于接收所述回波光信号并向所述光接收单元传输;扩束单元,设于所述主光学系统和光接收单元之间,用于接收经过主光学系统的回波光信号并经扩束后向所述光接收单元传输;其中,所述主光学系统与扩束单元组合的等效焦距大于所述主光学系统的焦距,以压缩所述光接收单元的视场角。
12.在第一方面的实施例中,在激光雷达中所述探测光信号的传输路径与所述回波光信号的传输路径部分相同。
13.在第一方面的实施例中,所述主光学系统包括:正透镜单元及分光单元;所述正透镜单元,用于从分光单元接收所述探测光信号并向外传输;以及用于接收所述回波光信号并向所述分光单元传输;所述分光单元,用于接收所述探测光信号并向所述正透镜单元传输;以及,用于从正透镜单元接收所述回波光信号并向所述光接收单元传输。
14.在第一方面的实施例中,所述扩束单元与正透镜单元之间的距离小于正透镜单元的焦距。
15.在第一方面的实施例中,所述光接收单元的感光面位于主光学系统与扩束单元组合的焦平面处。
16.在第一方面的实施例中,所述等效焦距还大于所述主光学系统的主平面与所述光接收单元的感光面之间的距离。
17.在第一方面的实施例中,所述分光单元包括:反射单元,包括反射部,用于反射回波光信号及探测光信号中的一者;所述反射单元还包括透射部或者所述反射单元配合有外部的空隙,以用于使所述探测光信号和回波光信号中的另一者通过。
18.在第一方面的实施例中,所述主光学系统还包括:偏振单元,设于所述正透镜单元背向分光单元的一侧,用于改变所述探测光信号和所述回波光信号的偏振态,以使输出的探测光信号处于第一偏振态,并使输出的回波光信号处于第二偏振态,所述第一偏振态不同于所述第二偏振态;所述分光单元,设于所述正透镜单元和所述扩束单元之间,配置成允许第二偏振态的回波光信号通过。
19.在第一方面的实施例中,所述的激光雷达,还包括:扫描单元,可一维或二维转动地设置,用于转动至预定姿态使所述探测光信号以对应的扫描角度向外传输,以及用于对应所述探测光信号的所述回波光信号向所述主光学系统传输。
20.在第一方面的实施例中,所述光接收单元包括:光探测器阵列;所述扩束单元包括子扩束单元阵列,其中每个子扩束单元对应于一个或多个光探测器设置。
21.在第一方面的实施例中,所述子扩束单元阵列的中部区域的各第一子扩束单元所对应的光探测器对应于激光雷达的视场的中心视场角度,各所述第一子扩束单元包括非偏心透镜;所述子扩束单元阵列的中部区域以外的周边区域的各第二子扩束单元所对应的光探测器对应于激光雷达的中心视场角度以外的边缘视场角度,各所述第二子扩束单元包括
偏心透镜。
22.在第一方面的实施例中,所述子扩束单元阵列为用于封装光探测器阵列的微透镜阵列。
23.在第一方面的实施例中,所述光探测器阵列包括:电路基板,具有设置所述光探测器阵列的第一表面;光学载件,具有设置所述微透镜阵列的第二表面,与所述电路基板封装为一体且使所述第二表面与第一表面相对,以使各所述微透镜对应于各所述光探测器设置。
24.在第一方面的实施例中,所述光接收单元包括:所述光接收单元包括:多个光探测器阵列,各所述光探测器阵列呈线阵排列;所述扩束单元包括至少一个柱面负透镜,所述柱面负透镜对应所述光接收单元中部分或全部所述光探测器阵列设置,所述柱面负透镜的延伸方向为所述光探测器阵列的长度方向。
25.本实用新型实施例中的激光雷达,达到有益效果:
26.通过主光学系统和扩束单元组合实现长焦距光学系统,应用于激光雷达中,可以在较为紧凑的体积内实现光接收单元的较长焦距。
27.一方面,长焦距光学系统可以在使用更大的感光面尺寸的探测器(如sipm)情况下,大幅度减小环境光对探测器的影响,且依然能保持激光雷达的结构紧凑。
28.另一方面,在相同的角分辨率情况下,使用更大的感光面尺寸的探测器(如sipm),从而可以拥有更多的感光单元个数,从而提高探测系统的动态范围。因此,本实用新型实施例中的光学系统不论是使环境光影响减少,还是使动态范围提高,都对激光雷达的测距性能起到至关重要的作用。
附图说明
29.图1展示一示例中探测器尺寸、视场角及焦距的关系原理示意图。
30.图2展示一示例中采用孔径光阑抑制环境光的激光雷达的原理示意图。
31.图3展示本实用新型一实施例中激光雷达的光学系统的结构示意图。
32.图4展示本实用新型实施例中光学系统的原理示意图。
33.图5a和图5b分别展示本实用新型不同实施例中基于偏振分光单元实现分光的二维扫描式激光雷达的光学系统的结构示意图。
34.图6和图7分别展示本实用新型不同实施例中基于反射单元实现分光的二维扫描式激光雷达的光学系统的结构示意图。
35.图8a展示本实用新型又一实施例中正-负透镜组合实现的结构示意图。
36.图8b展示图8a中正-负透镜组合的立体结构示意图。
37.图9a展示本实用新型实施例中光探测器阵列一种排布方式的结构示意图。
38.图9b展示本实用新型实施例中光探测器阵列又一种排布方式的结构示意图。
39.图10展示本实用新型实施例中负透镜阵列与光探测器阵列之间的排布结构示意图。
40.图11a和图11b分别展示本实用新型不同实施例中采用负透镜阵列作为扩束单元的光学系统的结构示意图。
41.图12a和图12b分别展示本实用新型不同实施例中负透镜阵列适配光探测器阵列
排布的结构示意图。
42.图13展示本实用新型实施例中光探测器阵列与微透镜阵列封装的结构示意图。
具体实施方式
43.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用系统,本说明书中的各项细节也可以基于不同观点与应用系统,在没有背离本实用新型的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
44.下面以附图为参考,针对本实用新型的实施例进行详细说明,以便本实用新型所属技术领域的技术人员能够容易地实施。本实用新型可以以多种不同形态体现,并不限定于此处说明的实施例。
45.为了明确说明本实用新型,省略与说明无关的器件,对于通篇说明书中相同或类似的构成要素,赋予了相同的参照符号。
46.在通篇说明书中,当说某器件与另一器件“连接”时,这不仅包括“直接连接”的情形,也包括在其中间把其它元件置于其间而“间接连接”的情形。另外,当说某种器件“包括”某种构成要素时,只要没有特别相反的记载,则并非将其它构成要素排除在外,而是意味着可以还包括其它构成要素。
47.当说某器件在另一器件“之上”时,这可以是直接在另一器件之上,但也可以在其之间伴随着其它器件。当对照地说某器件“直接”在另一器件“之上”时,其之间不伴随其它器件。
48.虽然在一些实例中术语第一、第二等在本文中用来描述各种元件,但是这些元件不应当被这些术语限制。这些术语仅用来将一个元件与另一个元件进行区分。例如,第一接口及第二接口等描述。再者,如同在本文中所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文中有相反的指示。应当进一步理解,术语“包含”、“包括”表明存在所述的特征、步骤、操作、元件、组件、项目、种类、和/或组,但不排除一个或多个其他特征、步骤、操作、元件、组件、项目、种类、和/或组的存在、出现或添加。此处使用的术语“或”和“和/或”被解释为包括性的,或意味着任一个或任何组合。因此,“a、b 或c”或者“a、b和/或c”意味着“以下任一个:a;b;c;a和b;a和c;b和c;a、 b和c”。仅当元件、功能、步骤或操作的组合在某些方式下内在地互相排斥时,才会出现该定义的例外。
49.此处使用的专业术语只用于言及特定实施例,并非意在限定本实用新型。此处使用的单数形态,只要语句未明确表示出与之相反的意义,那么还包括复数形态。在说明书中使用的“包括”的意义是把特定特性、区域、整数、步骤、作业、要素及/或成份具体化,并非排除其它特性、区域、整数、步骤、作业、要素及/或成份的存在或附加。
50.表示“下”、“上”等相对空间的术语可以为了更容易地说明在附图中图示的一器件相对于另一器件的关系而使用。这种术语是指,不仅是在附图中所指的意义,还包括使用中的装置的其它意义或作业。例如,如果翻转附图中的装置,曾说明为在其它器件“下”的某器件则说明为在其它器件“上”。因此,所谓“下”的示例性术语,全部包括上与下方。装置可以旋转90
°
或其它角度,代表相对空间的术语也据此来解释。
51.虽然未不同地定义,但包括此处使用的技术术语及科学术语,所有术语均具有与本实用新型所属技术领域的技术人员一般理解的意义相同的意义。普通使用的字典中定义的术语追加解释为具有与相关技术文献和当前提示的内容相符的意义,只要未进行定义,不得过度解释为理想的或非常公式性的意义。
52.激光雷达的光学系统存在环境光干扰的问题,尤其在基于激光雷达的测距能力考量的情形下,会选择尺寸更大的光探测器(例如sipm),相应的视场角就更大,也就意味着能接收到干扰的环境光的角度就更多。为此,在目前的激光雷达中已进行了前述两方面的抑制环境光的改善,但是激光雷达产品体积会受到限制使得难以设置到合适的焦距,而且还需要增加孔径光阑等光学器件来实现光学系统的焦距延长。另外一种是通过压缩滤光片的带宽来压缩光探测器的视场角,但是存在受限于激光雷达物理配置参数的问题。
53.鉴于此,本实用新型实施例中提供改进的激光雷达的结构。
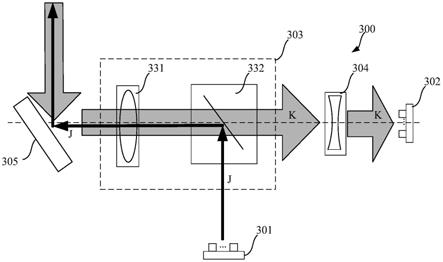
54.如图3所示,展示本实用新型一实施例中激光雷达的光学系统的结构示意图。所述激光雷达300包括:光发射单元301、光接收单元302、主光学系统303及扩束单元304。
55.所述光发射单元301,用于发射探测光信号,也可以称为发射端。在一些实施例中,所述光发射单元301可以包括光发射器阵列,其中包含多个按二维面阵排布或一维线阵排布的光发射器。每个光发射器可以为边缘发射激光器(edge-emitting semiconductor lasers,eel) 或垂直腔面发射激光器(vertical-cavity surface-emitting laser,vcsel)。
56.所述光接收单元302,用于接收由所述探测光信号产生的回波光信号,所述探测光信号可以照射在障碍物表面并反射形成所述回波光信号;所述光接收单元302也可以被称为接收端。在一些实施例中,所述光接收单元302可以包括光探测器阵列,其中包含多个按二维面阵排布或一维线阵排布的光探测器。每个光探测器可以为硅光电倍增管(sipm)或单光子雪崩二极管(spad)等。
57.所述主光学系统303,配置在光发射单元301和光接收单元302之间,用于接收所述探测光信号并向外传输;以及,用于接收所述回波光信号并向所述光接收单元302传输。
58.在图示中,所述探测光信号的第一传输路径j与所述回波光信号的第二传输路径k部分相同,即所述主光学系统303为收发同轴的光学系统。所述主光学系统303包括正透镜单元 331和分光单元332。所述正透镜单元331与分光单元332之间的光束传输路径为第一传输路径j和第二传输路径k所共用,其中j由沿较细黑色实线箭头所指示,k由较粗阴影箭头所指示。
59.所述正透镜单元331用于从分光单元332接收所述探测光信号并向激光雷达300外的方向传输,以及用于接收回波光信号并向所述分光单元332传输。具体的,所述正透镜单元331 可以对接收到的探测光信号进行汇聚以准直后向外传输,具体可如图示中向扫描单元305输出并经扫描单元305向激光雷达300外传输;并且,所述正透镜单元331还可以对回波光信号进行汇聚后向光接收单元302传输,具体可如图示中从扫描单元305接收回波光信号。在一些示例中,所述扫描单元305可一维或二维转动地设置,用于转动至预定姿态使所述探测光信号以对应的扫描角度向外传输,以及用于对应所述探测光信号的所述回波光信号向所述主光学系统303传输。示例性地,扫描单元305可以包括振镜、mems反射镜、转镜中的任意一种。
60.所述分光单元332使所述探测光信号和回波光信号在所述光发射单元301、光接收单元 302以及正透镜单元331之间传输。如图4所示,一方面探测光信号沿较细黑色实线箭头所指示的第一传输路径j方向传输,分光单元332接收光发射单元301的探测光信号并向所述正透镜单元331传输;以及另一方面,回波光信号沿较粗阴影箭头所指示的第二传输路径k 方向传输,分光单元332从正透镜单元331接收回波光信号并向光接收单元302传输。示例性地,所述分光单元332可以通过偏折或透射以对探测光信号和回波光信号进行分光。比如在图4示例中,分光单元332令回波光信号透射通过,而将探测光信号偏折(如反射)后传输。在其他实施例中,光学系统也可以配置成分光单元332对所接收的回波光信号偏折后传输,对所接收的探测光信号透射通过。
61.所述扩束单元304,设于所述主光学系统303和光接收单元302之间,用于接收经过主光学系统303的回波光信号并经扩束后向所述光接收单元302传输。在具体示例中,所述扩束单元304对应于图3实施例中的负透镜单元,可以是负透镜或者负透镜组实现。通过正透镜单元331和负透镜单元的组合作用,使激光雷达300中的接收端光学系统的焦距拉长。
62.在一些实施例中,所述分光单元332可以是对特定偏振态的光信号通过的光学部件,其余偏振态的光信号不会通过。具体示例中,可以通过令探测光信号和回波光信号具有不同的偏振态,从而由分光单元332让特定偏振态的回波光信号通过,而不让其它偏振态的探测光信号通过。
63.为使探测光信号和回波光信号处于不同的偏振态,在可能的示例中,所述主光学系统303 还包括偏振单元,设于所述正透镜单元331背向分光单元332的一侧,用于改变所述探测光信号和所述回波光信号的偏振态,以使输出的探测光信号处于第一偏振态,并使输出的回波光信号处于第二偏振态,所述第一偏振态不同于所述第二偏振态;相应的,所述分光单元332,设于所述正透镜单元331和所述扩束单元304之间,配置成允许第二偏振态的回波光信号通过。
64.在又一些实施例中,所述分光单元332也可以通过反射单元实现,所述反射单元可包括反射部用于反射回波光信号及探测光信号中的一者,所述反射单元还包括透射部(具体可参考图7实施例)或者所述反射单元配合有外部的空隙(具体可参考图6实施例),以用于使所述探测光信号和回波光信号中的另一者通过,例如透射。
65.以下再从光路结构的角度,具体说明正透镜单元303及扩束单元304配合以实现长焦距光学系统的原理。
66.需说明的是,以下图4、图5a、图5b、图6、图7实施例中所展示的视场角为瞬时视场角,即通过单个光探测器的受光角度或观测视野来更加清楚直观地说明本实用新型技术方案的原理。
67.如图4所示,展示本实用新型实施例中一种光学系统的结构示意图。图4中的光学系统可应用于激光雷达的接收端。具体的,所述光学系统包括正透镜401和负透镜402的组合。其中,正透镜401的焦距为f1,视场角为α,焦点为a。负透镜402视场角为γ。经正透镜 401的光线本应汇聚于a点,但在正透镜401的主平面和正透镜401的焦点a之间设置负透镜402之后,由于负透镜402对光线的扩张作用,使得光线的汇聚点从a远移至b点,且视场角变为γ,γ小于α。正透镜401和负透镜402组合形成等效透镜的主平面和汇聚点b之间的间距为f,即等效透镜的焦距为f。
502对应接收。其中,所述反射镜507用于折叠光路,使整体的光路结构更为紧凑,但其并非必要器件,例如可以省略反射镜507,而经过四分之一波片506而发生偏振态变化后的光束直接被扫描器508扫描。
78.在可能的实施例中,所述负透镜可以是单个,也可以是沿光路前后排列的多个,以进一步延长焦距。
79.在具体实施例中,基于上述实施例所展示的光路系统中,接收端由通过正-负透镜组合的光学系统焦距范围可以达到例如100mm-300mm。激光雷达的发射端和接收端可以共用正透镜,而偏振分光器件位于正、负透镜之间,负透镜单独位于接收端而对应光探测器阵列设置,实现长焦距的接收端光学系统。
80.在可选示例中,发射端可选择实现相对短焦距的光学系统,保证激光均能有效出射;而接收端可选择实现相对长焦距的光学系统;从而可以用较大尺寸感光面的光探测器(例如 sipm探测器)进行接收。如此,对于sipm来说,具有更小的视场角,对应就能接收更少的环境光。同时,在相同的角分辨率情况下,使用更大的感光面尺寸,可以拥有更多的感光单元个数,从而提高激光雷达的动态范围。
81.激光雷达可以选择采用光发射器阵列和光探测器阵列。光探测器阵列可以设置在光学系统的焦平面上,即光探测器阵列的感光面位于主光学系统与扩束单元组合的焦平面处。所述光发射器阵列、光探测器阵列可以一维线阵或二维面阵,二维面阵可以是呈矩阵式排布或多列交错式排布,一个或多个光发射器与对应的一个或多个光探测器构成探测通道,同一探测通道中的光发射器和光探测器对应进行探测光信号的发送及其产生的回波光信号的接收。
82.在一些实施例中,激光雷达工作时光发射器阵列、光探测器阵列可以每列逐个探测通道进行发光。在一种示例中,各列之间可以逐列轮巡发光,即一列完成发光,轮到下一列中各探测通道的光发射器逐个发光。或者,在另一种示例中,也可以各列线阵同时发光,即各列线阵的第一个通道同时发光,之后每列的其它探测通道按列的排布顺序依次同时发光。又或者,在还有一种示例中,还可以在同一列上多个线阵的对应探测通道同时发光,比如同一列上多个线阵的第一个探测通道同时发光,之后同样地,多个线阵的其它探测通道按列的排布顺序依次同时发光,在同一列的上多个线阵完成发光之后,逐列轮巡发光,即一列多个线阵完成发光,轮到下一列多个线阵按上述过程进行发光。光探测器阵列中的各光探测器也依循配合同一探测通道的光发射器进行工作的方式,以按上面的任何一种进行相应回波光信号的接收。
83.需说明的是,在其他实施例中,光发射单元也可以实现为单个的激光器,光接收单元也可以实现为单个的光探测器等,并非以上述为限。
84.在另外的一些实施例中,除了上述基于偏振分光单元来实现分光以外,所述分光单元还可以通过反射单元实现,所述反射单元具有用于反射探测光信号及回波光信号中一者的反射部,并可具有透射部或配合外部空隙来实现反射探测光信号及回波光信号中另一者的透射,从而实现分光。并且,同样可以适用上述正-负透镜组合来延长接收端的焦距。
85.如图6和图7所示,分别展示本实用新型不同实例中基于反射单元实现分光的二维扫描式激光雷达的光学系统的结构示意图。
86.如图6和图7所示,激光雷达包括:光发射器阵列601、光探测器阵列602、正透镜
603、负透镜604、反射单元、反射镜606及扫描器607。需说明的是,其中的正透镜603和负透镜 604依然是等效表示。
87.图6和图7实施例的差异在于反射单元的实现存在差异,以及发送端和接收端的位置发生相应变化。
88.与图5a和图5b的差异在于,图6中的反射单元实现为尺寸相对正透镜603较小的反射镜605a,而图7中的反射单元实现为小孔反射镜605b。
89.图6中光发射器阵列601输出的探测光信号被反射镜605a反射至正透镜603,由正透镜 603准直后经反射镜606反射至扫描器607,被扫描器607反射后射出激光雷达;对应的回波光信号进入激光雷达,被扫描器607和反射镜606反射至正透镜603,正透镜603对回波光信号进行汇聚,并且回波光信号通过反射镜605a周侧的空隙传输至所述负透镜604,经负透镜604入射至光探测器阵列602。
90.图7中光发射器阵列601输出的探测光信号从小孔反射镜605b中部的小孔穿过,经过正透镜603、反射镜606、扫描器607出射;对应的回波光信号进入激光雷达,经扫描器607、反射镜606、正透镜603以及小孔反射镜605b,经小孔反射镜605b反射至负透镜604,并传输至光探测器阵列602。需说明的是,图7实施例中反射镜的透射部为小孔,以用于使光线通过;在其它实施例中,透射部还可以为其它形状,并非以小孔为限制;或者透射部还可以为其它形式实现,例如透明材质的玻璃等。
91.正-负透镜组合中的正、负透镜的实现可以加以选择。
92.在一些实施例中,所述正透镜可以实现为双凸透镜,负透镜可以实现为双凹透镜。
93.在又一些实施例中,正透镜可以是双凸透镜,而负透镜的类型可以是柱面负透镜。如图 8a和图8b所示,与正透镜801组合的柱面负透镜可以是平凹柱透镜802,图8b是图8a的立体视图以利于理解其结构。通过采用柱面负透镜,可以使正-负透镜组合在一个方向上保持短焦距(例如图8b中y方向所示,即柱面负透镜的延伸方向),而另一个方向上实现长焦距(例如图8b中z方向,即利用柱面负透镜在z方向上具有的凹面实现长焦距)。需说明的是,在其他实施例中,所述柱面负透镜也可以是双凹柱面负透镜,并非以此实施例为限。
94.由于光接收单元,如光探测器阵列,其排布图案可以是非中心对称的,即其在不同方向之间排布的探测器的数量、尺寸、排布方式等可能不同,因此上述柱面负透镜方案可适用于光接收单元的尺寸受限的场景。当光接收单元在某个方向上感光面尺寸受限,或不宜采用长焦距系统时,则可以采用该柱面负透镜方案。比如,图9a中,光探测器阵列中的长度方向上多个光探测器901(例如sipm)为间隔排列。
95.然而,如果光探测器阵列是按如图9b的排列方式,各个光探测器901之间无间隔,整体呈长条状线阵排布,其长度方向(即图中横向)可参考图8b中的y方向,或者也可以参考图10、图12a、图12b中的行方向。激光雷达的回波光斑(可看作圆形)需要尽量覆盖整个长条状线阵探测器。光探测器阵列中可以包含:沿与所述长度方向垂直的宽度方向(可参考图8b中的z方向)排布的多个所述长条状的光探测器线阵,光探测器901的排布可参考图 10中多行的光探测器1001。可以理解的是,在图9b中,由于长度方向上相邻光探测器901 之间的间距可能很小,假如在长度方向上增大焦距,很容易发生线阵中的光探测器901之间的串扰,因此对于长度方向上不适合采用长焦距系统,然而对于宽度方向而言,多条线阵之间的间距可能较大,即使拉长焦距,相对不容易发生串扰。因此,可以采用例如图8a、图 8b中的柱
面负透镜方案,维持长度方向的焦距,并在宽度方向上实现长焦距,抑制环境光,提高信噪比。
96.如图10所示,展示本实用新型实施例中负透镜阵列与光探测器阵列之间的排布结构示意图。光探测器1001展示为方形,负透镜阵列中的每个负透镜1002对应一个光探测器1001设置,图中覆盖每个光探测器1001的圆形为回波光信号的光斑1003的简单表示。所述负透镜 1002可以实现为凹微透镜。所述凹微透镜可以是非球面镜,具体可以为柱面负透镜或一般的凹透镜,也可以为平凹透镜或双凹透镜。如图所示,示例性的,各负透镜可分别与各光探测器(如sipm)对应地设置,各负透镜1002之间可以相互分离地单独设置,例如图中虚线框所表示;或者,多个负透镜1002之间也可以一体成型,即负透镜阵列中的全部(或部分)负透镜连结形成一个光学器件等,如图中框1004所示,整体化的负透镜阵列的光学器件可以实现大视场角(比如10
°
~20
°
)。
97.在一些实施例中,通过设置负透镜阵列中的各个凹微透镜的类型,可以校正不同视场角的像差。具体例如,由于边缘视场像差大于中心视场像差,可以通过将负透镜阵列的中部区域(对应激光雷达的中心视场角度)的各凹微透镜设置为非偏心透镜,并将中部区域以外的周边区域(对应激光雷达的边缘视场角度)的各凹微透镜设置为偏心透镜。具体的,偏心透镜可以使光束发生偏折,即使边缘位置的光束向中部区域偏折。从而,此种结构有助于减小光探测器之间的间隔和尺寸。
98.在一些实施例中,对于光探测器阵列中的每个光探测器,所述扩束单元可以包括子扩束单元阵列,其中每个子扩束单元对应于一个或多个光探测器设置。示例性地,所述扩束单元可以是负透镜阵列,其中的每个子扩束单元为负透镜。
99.如图11a和图11b所示,展示本实用新型不同实例中采用负透镜阵列1102作为扩束单元的光学系统的结构示意图。图11a、图11b中的z轴、x轴方向可以与图8b中一致。
100.如图11a所示,展示了适用于机械式激光雷达的光学系统,即带有旋转结构而在工作时旋转的激光雷达。光学系统包括正透镜1101、负透镜阵列1102。对应于光探测器阵列1103,每个负透镜1121可以对应于一个或多个光探测器1131以传输相应探测通道的回波光信号。
101.再如图11b所示,展示了适用于扫描式激光雷达的光学系统。光学系统包括:正透镜1101、负透镜阵列1102、扫描器1104,负透镜阵列1102对应光探测器阵列1103设置;所述扫描器 1104可以一维或二维旋转,以选择对应探测通道的光信号传输。此实施例的光学系统可应用于例如图5a、图5b、图6、图7实施例中。
102.从图11a和图11b实施例可见,本实用新型实施例中的正-负透镜组合的光学系统,可灵活适用于不同类型的激光雷达中,以延长接收端的焦距来压缩视场角,从而抑制环境光干扰。由此,通过此光学系统,可以使不同类型的激光雷达产品的抗干扰性能提升,以达到提升不同多种类型的激光雷达产品的测距性能的目的。
103.在一些实施例中,负透镜阵列的排布也可以与光探测器阵列相适配。例如,图12a展示了一种实施例中的负透镜阵列的结构,所述负透镜阵列1200a可以是相适配地包括多个条形的凹微透镜1201a(如柱面凹透镜)的沿特定方向连续排布,每个凹微透镜1201a可对应覆盖一行光探测器、一行若干光探测器构成的光探测器阵列或者包括光探测器与所述光探测器阵列间隔排列构成的一行光探测器,其中光探测器阵列例如呈现为图9b中的光探测
器阵列,每行中各光探测器、各光探测器阵列或者各光探测器与光探测器阵列之间的间隔可尽量小。或者,如图12b所示,展示又一种实施例中负透镜阵列的结构,负透镜阵列1200b包括间隔设置的多个凹微透镜1201b,每个凹微透镜1201b可对应覆盖一个光探测器或若干光探测器构成的光探测器阵列,例如呈现为图9b中的光探测器阵列。图12a和图12b的负透镜阵列的结构可以根据光探测器的间隔来选择使用。
104.在一些实施例中,所述负透镜阵列也易于与光探测器阵列封装,以与各光探测器对准。由于其精度达到毫米级,故不易影响拉长焦距的效果。
105.如图13所示,展示本实用新型实施例中光探测器阵列与微透镜阵列(即多个凹微透镜构成的阵列)封装的结构示意图。
106.图中展示有电路基板1301及光学载件1302。
107.所述电路基板1301,例如印刷电路板(pcb),具有设置所述光探测器阵列的第一表面。图中示例性地展示了光探测器阵列中的两列或两行光探测器1303,但其数量并非以此为限。可以对照图8、图11a、图11b中的x、y、z方向来参考图13中的z、x方向。
108.所述光学载件1302,具有设置所述微透镜阵列的第二表面。所述光学载件与所述电路基板封装为一体且使所述第二表面与第一表面相对,以使各所述微透镜1305(即微凹透镜)对应于各所述光探测器1303设置,例如图11、图12a、图12b中的位置对应关系。
109.在此实施例中,所述电路基板可包括侧壁1306,凸出于所述电路基板1301围绕所述光探测器阵列设置,所述光学载件1302与所述侧壁1306连接,形成容纳所述光探测器阵列的空腔。其中,电路基板1301与侧壁1306之间可以为一体成型结构,也可以互为独立部件。
110.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。