机械开关和冰箱
【技术领域】
1.本实用新型涉及开关结构领域,具体涉及一种机械开关和冰箱。
背景技术:
2.冰箱,保持恒定低温的一种制冷设备,也是一种使食物或其他物品保持恒定低温冷态的民用产品。为了节省耗能,冰箱中一些负载需要其他机械开关进行控制,使负载在一定条件下开启或者关闭。但是,目前机械开关设计较复杂。
3.因此,有必要提供一种机械开关来解决上述问题。
技术实现要素:
4.本实用新型的目的在于提供一种机械开关,解决机械开关设计较复杂的问题。
5.本实用新型的技术方案如下:一种机械开关,应用于冰箱,所述机械开关包括:
6.壳体,所述壳体具有容纳空间;
7.触发件,所述触发件包括静触点和动触点,所述动触点与所述壳体活动连接,所述静触点与所述壳体固定连接;
8.金属弹片,所述金属弹片连接所述动触点;以及
9.驱动机构,所述驱动机构包括按钮和与所述按钮固定连接的顶杆,所述按钮穿设于所述壳体,并能够相对所述壳体移动,所述顶杆设置于所述容纳空间内并抵接所述金属弹片,所述顶杆能够跟随所述按钮移动以驱动所述金属弹片并带动所述动触点与所述静触点抵接或分离。
10.可选的,所述按钮与所述顶杆一体成型。
11.可选的,所述顶杆设置在所述按钮靠近所述金属弹片的一侧,且朝向所述金属弹片延伸。
12.可选的,所述壳体包括相互间隔设置的上盖和底座,所述按钮穿设于所述上盖,所述静触点固定设置于所述底座,
13.当所述按钮往靠近所述底座方向移动时,所述顶杆抵接所述金属弹片并带动所述动触点往所述静触点移动,以使所述动触点和所述静触点接触;
14.当所述按钮往远离所述底座方向移动时,所述顶杆跟随所述按钮移动以远离所述金属弹片,所述金属弹片根据弹性恢复力带动所述动触点往远离所述静触点方向移动,以使所述静触点和所述动触点分离。
15.可选的,所述机械开关还包括弹簧,所述弹簧的一端与所述按钮连接,所述弹簧的另一端与所述底座连接。
16.可选的,所述机械开关还包括:
17.第一插针,所述第一插针的一端与所述静触点连接,所述第一插针的另一端露出于所述壳体;
18.第二插针,所述第二插针与所述第一插针间隔设置,所述第二插针的一端与所述
金属弹片电连接,所述第二插针的另一端露出于所述壳体。
19.可选的,所述壳体内设置有导向槽,所述按钮设置于所述导向槽内,以使得所述按钮在所述导向槽内移动。
20.本技术实施例还提供一种冰箱,所述冰箱包括:
21.箱体;
22.门体,所述门体与所述箱体铰接;
23.功能模块,设置在所述箱体或所述门体上;以及
24.机械开关,如以上任一项所述的机械开关,所述机械开关安装于所述箱体或所述门体,所述机械开关与所述功能模块电连接,用于通过所述静触点与所述动触点的抵接状态控制所述功能模块的开启或关闭。
25.可选的,当所述门体相对于所述箱体打开时,所述动触点与所述静触点不连接,以使所述功能模块开启;
26.当所述门体相对于所述箱体关闭时,所述动触点与所述静触点连接,以使所述功能模块关闭。
27.本技术的有益效果在于:本技术中的按钮与顶杆固定连接,当按钮相对壳体移动时,带动顶杆移动,移动的顶杆驱动金属弹片上的动触点朝向或远离静触点移动,进而使得动触点与静触点电连接或断开。相比于现有技术中的开关设计,本技术中机械开关的按钮与顶杆固定连接,并且顶杆直接抵接金属弹片,使得顶杆能够跟随按钮移动以直接驱动金属弹片并带动动触点移动,实现动触点与静触点抵接或分离,顶杆可以直接驱动连接动触点的金属弹片,结构简洁,简化了机械开关的具体结构。
【附图说明】
28.图1为本技术实施例提供的冰箱的结构示意图;
29.图2为图1所示的冰箱中机械开关的第一种状态的结构示意图;
30.图3为图1所示的冰箱中机械开关的第二种状态的结构示意图;
31.图4为本技术实施例提供的冰箱的第一种俯视图;
32.图5为本技术实施例提供的冰箱的第二种俯视图;
33.图6为本技术实施例提供的冰箱的第三种俯视图。
【具体实施方式】
34.附图作为本技术的一部分,用来提供对本实用新型的进一步的理解,本实用新型的示意性实施例及其说明用于解释本实用新型,但不构成对本实用新型的不当限定。显然,下面描述中的附图仅仅是一些实施例,对于本领域普通技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。下面结合附图和实施方式对本实用新型作进一步说明。
35.人们日常生活中使用的冰箱通常会设置机械开关以控制其他负载的开启或关闭,进而节省耗能。相关技术中,机械开关设计需要按钮向下移动一定行程后,推动转动块转动,并转动到一定角度后才能带动翘杆转动,翘杆转动后带动动触片移动,进而使得动触片与静触片接触,该机械开关的结构较复杂,造成用户使用不方便,不能满足用户的使用需
求。
36.因此,本实用新型提供了一种机械开关和冰箱来解决上述问题。其中,机械开关包括与壳体连接的静触点、动触点、按钮以及与按钮连接的顶杆,按钮穿设于壳体并能相对壳体运动,顶杆可以跟随按钮移动,当按钮朝向靠近静触点移动时,顶杆会直接抵接金属弹片,使得顶杆能够跟随按钮移动以直接驱动金属弹片,金属弹片带动动触点朝向静触点移动,并使得动触点与静触点抵接。当按钮朝向远离静触点移动时,顶杆会带动动触点远离静触点移动,使得动触点与静触点分离。相对于机械开关中需要按钮、转动块、翘杆和动触片的配合才能使动触片与静触片接触,采用本技术实施例中机械开关的按钮与顶杆固定连接,并且顶杆直接抵接金属弹片,使得顶杆能够跟随按钮移动以直接驱动金属弹片并带动动触点移动,实现动触点与静触点抵接或分离,结构简洁,简化了机械开关的具体结构,下面结合附图,对机械开关和冰箱进行详细说明。
37.请参阅图1,图1为本技术实施例提供的冰箱的结构示意图。本技术提供的冰箱1包括箱体10、门体20、控制模块30、功能模块40和机械开关50。其中,箱体10在门体20的连接端与门体20铰接,通过门体20以选择性的打开或关闭冰箱1。
38.控制模块30设置在箱体10上,控制模块30输出启动功能模块40的控制信号或输出关闭功能模块40的控制信号,通过控制信号控制功能模块40启动或关闭。具体的,控制模块30与机械开关50电连接,控制模块30通过检测机械开关50的导通或断开的状态,接受检测信号后控制模块30。控制模块30与功能模块40电连接,用于通过控制模块30输出控制信号控制功能模块40开启或关闭。
39.功能模块40设置在箱体10内。需要说明的是,功能模块40在实际应用过程中可以根据需要开启或关闭。示例性的,本实施例以功能模块40为照明灯为例进行说明。具体的,冰箱1箱体10内的照明装置一般由机械式开关和照明灯具组成,即由开关和照明灯简单串联而成。当冰箱1门体20打开时,机械开关50断开,控制模块30接收到电路不导通的信号,并输出控制信号控制照明灯亮。当冰箱1门体20关闭时,机械开关50闭合,控制模块30接收到电路导通的信号,并输出控制信号控制照明灯失电熄灭。通过设置在门体20打开时点亮照明灯,在门体20关闭时控制照明灯熄灭,在关门状态下不需要照明灯时,通过门体20的状态控制照明灯的关闭时,节省了耗能。
40.需要说明的是,功能模块40还可以为其他类型,这里仅以功能模块40为照明灯为例进行说明,而不应理解为对功能模块40的限制。
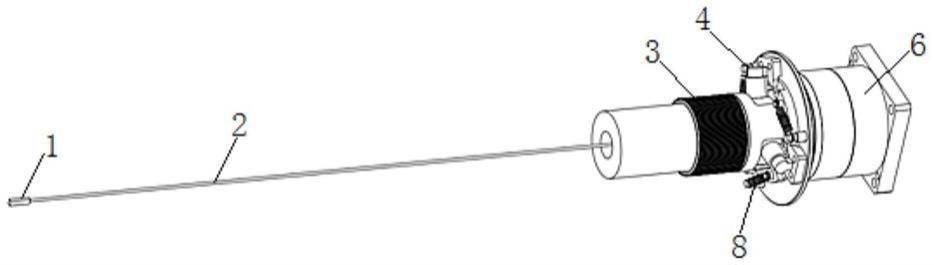
41.请继续参阅图2至图3,图2为图1所示的冰箱中机械开关的第一种状态的结构示意图;图3为图1所示的冰箱中机械开关的第二种状态的结构示意图。本技术实施例提供的机械开关50包括壳体510、触发件520和驱动机构530。其中,壳体510包括上盖513和底座514,上盖513和底座514连接形成具有容纳空间512的壳体510。
42.触发件520设置于容纳空间512内。触发件520包括静触点521和动触点522。静触点521设置在底座514上,且静触点521与底座514固定连接,动触点522与壳体510活动连接。在一些实施例中,静触点521与底座514固定连接,动触点522与上盖513活动连接。可以理解的是,静触点521和动触点522在壳体510内的具体位置可以任意设置,只需要满足动触点522在一定范围内可与静触点521接触即可,在此本技术对静触点521和动触点522的具体位置不作具体的限定。
43.驱动机构530包括按钮531和顶杆532,顶杆532与按钮531固定连接。其中,按钮531穿设在壳体510上,且壳体510内设置有导向槽,按钮531能在导向槽内朝向靠近底座514和远离底座514的方向移动,以保证按钮531能相对壳体510移动。在移动过程中,按钮531的部分结构移动至壳体510内。
44.顶杆532设置在容纳空间512内,顶杆532能够跟随按钮531移动以驱动动触点522与静触点521接触。顶杆532设置在按钮531靠近静触点521的一侧,且朝向静触点521延伸,顶杆532驱动动触点522朝向静触点521移动。顶杆532包括第一部分和第二部分,第一部分与按钮531固定连接,第二部分自第一部分向静触点521弯折延伸。第一部分和第二部分之间通过圆弧连接,使得顶杆532与金属弹片的接触面积更大,进而使得顶杆532与金属弹片的抵接效果更好。第一部分和第二部分可一体成型。在其他实施例中,顶杆532也可以是设在按钮531靠近静触点521的一侧,由第一部分直接向靠近静触点521的方向斜向设置。
45.其中,顶杆532与按钮531一体成型。通过一体成型设置的顶杆532和按钮531,在移动过程中,顶杆532直接随着按钮531一起移动,从而驱动动触点522与静触点521接触。相较于相关技术中机械开关50按动接通行程是靠按钮531挤压转动块来控制,转动块转动不稳定,导致开关接通行程误差较大。本实施例中按钮531和顶杆532的设计简化了机械开关50的接通行程。
46.可以理解的是,在其他一些实施例中,顶杆532与按钮531可通过其他方式固定连接,比如通过粘胶将顶杆532与按钮531粘接,可以通过卯榫结构固定顶杆532与按钮531,也可以通过卡扣结构固定顶杆532与按钮531。需要说明的是,顶杆532与按钮531的连接方式并不限于上述几种连接方式,还可以是其他连接方式,只需满足顶杆532可直接跟随按钮531移动即可,本技术实施例在此不作限定。
47.机械开关50还包括金属弹片550,金属弹片550与动触点522连接。金属弹片550可以用于带动动触点522朝向静触点521移动,直至动触点522与静触点521抵接。金属弹片550也可以用于给动触点522提供移动的力,使得动触点522向远离静触点521的方向移动。具体的,当按钮531向靠近底座514方向移动时,顶杆532抵接金属弹片550并带动动触点522往静触点521移动,以使动触点522和静触点521接触。当按钮531往远离底座514方向移动时,顶杆532跟随按钮531移动以远离金属弹片550,金属弹片550带动动触点522往远离静触点521方向移动,以使静触点521和动触点522分离。
48.需要说明的是,金属弹片550可以是普通的弹片,并在弹片的外表上铺设可以导电的金属物质,也可以是具有导电能力又有弹性功能的金属材料制成的弹片。金属弹片550的具体材料本技术实施例在此不作限定,金属弹片550只需要满足既可以导电又具有一定的弹性即可。
49.机械开关50还包括弹簧560,弹簧560的一端与按钮531连接,另一端设置在底座514。具体的,弹簧560的一端设置在按钮531的容纳腔内,当按钮531向靠近底座514的方向移动时,弹簧560压缩在按钮531的容纳腔内。通过将弹簧560压缩在按钮531内,可以节省装配空间,使得机械开关50的体积减小。需要说明的是,弹簧560的一端也可以直接与按钮531靠近底座514的一端连接,当按钮531朝靠近底座514移动时,弹簧560被压缩。在保证弹簧560被压缩具有弹力的情况下,按钮531不需要设置容纳腔用来容纳弹簧560,可以减小按钮531的加工流程,使得按钮531与弹簧560的安装更加简单方便。需要说明的是,弹簧560的另
一端可以与底座514固定连接,也可以只是与底座514接触连接,只需保证弹簧560的一端与按钮531连接即可,在此本技术不作具体的限制。
50.弹簧560可提供按钮531朝远离底座514方向移动的力,顶杆532跟随按钮531朝远离底座514的方向移动以远离金属弹片550,金属弹片550在自身弹力的作用下,会朝远离静触点521的方向移动,并带动动触点522往远离静触点521的方向移动,直至静触点521与动触点522分离。
51.需要说明的是,弹簧560被压缩后的大小需要满足以下条件:当弹簧560不能再被压缩时,顶杆532可以使静触点521与动触点522接触。
52.机械开关50还包括插针570,插针570具有一定的导电作用,插针570用于与控制模块接触,通过插针570的接通发送信号给控制模块,控制模块根据门体20的状态,发送控制信号至功能模块40,进而控制功能模块40的开启或关闭。
53.插针570包括第一插针572和第二插针571,第一插针572和第二插针571间隔设置。第一插针572的一端与静触点521连接,第一插针572的另一端设置于壳体510外。第二插针571的一端与金属弹片550电连接,第二插针571的另一端设置于壳体510外。
54.第一插针572设置于壳体510外的另一端和第二插针571设置于壳体510外的另一端可插设于插电座,插电座与其他功能模块40直接电连接,用于控制其他负载的接通或断开。具体的,第二插针571的一端与金属弹片550电连接,金属弹片550与动触点522连接,静触点521与第一插针572的一端连接,当静触点521和动触点522连接时,第一插针572的一端和第二插针571的一端导通,从而可以接通电路。当静触点521和动触点522分离时,第一插针572的一端和第二插针571的一端断开,从而电路断开。
55.请结合图2和图3,当按钮531还未移入壳体510内时,弹簧560在按钮531内未被压缩,且静触点521与动触点522分离,第一插针572的一端和第二插针571的一端断开。当按钮531朝靠近底座514方向移动时,弹簧560部分被压缩,顶杆532与金属弹片550抵接,使得动触点522与静触点521接触,第一插针572的一端和第二插针571的一端接通。
56.在其他一些实施例中,当静触点521与动触点522完全抵接时,按钮531可全部移动到壳体510内,即门体20与箱体10完全接触,门体20与箱体10之间不存在间隙,可以节省耗能,进而使得冰箱1更好的工作。
57.请继续参阅图4至图5,图4为本技术实施例提供的冰箱的第一种俯视图;图5为本技术实施例提供的冰箱的第二种俯视图。本技术实施例提供的机械开关50设置在箱体10上,且机械开关50中的按钮531凸出设置于箱体10外。当门体20相对于箱体10打开时,动触点522与静触点521不连接,以使功能模块40开启;当门体20相对于箱体10关闭时,动触点522与静触点521连接,以使功能模块40关闭。
58.具体的,当门体20相对于箱体10关闭时,门体20可抵接机械开关50的按钮531。按钮531沿着导向槽向靠近底座514的方向相对于壳体510移动,当部分按钮531移入壳体510内,弹簧560在底座514上逐渐被压缩,顶杆532跟随按钮531一起向靠近底座514的方向运动,顶杆532接触金属弹片550后带动金属片朝向静触点521移动,金属片的移动带动动触点522朝向静触点521移动,直至动触点522和静触点521连接或抵接。当动触点522与静触点521连接,第一插针572和第二插针571导通,则控制系统检测到机械开关50的导通后,会发出控制信号至功能模块40,控制功能模块40的开启或关闭。
59.当门体20相对于箱体10打开时,在底座514上被压缩的弹簧560逐渐释放弹性,给按钮531提供向远离底座514方向移动的力,使得按钮531沿着导向槽向远离底座514的方向相对于壳体510移动,直至按钮531凸出设置于箱体10外。按钮531带动顶杆532向远离底座514的方向移动,金属弹片550在自身弹力的作用下向远离静触点521的方向移动,金属弹片550带动动触点522朝远离静触点521的方向移动,直至静触点521与动触点522远离。当静触点521与动触点522断开设置时,第一插针572和第二插针571不导通,则控制系统检测到机械开关50断开后,控制系统发出控制信号至功能模块40,控制功能模块40的开启或关闭。
60.请继续参阅图6,图6为本技术实施例提供的冰箱的第三种俯视图。机械开关50也可以设在门体20上,当门体20关闭时,通过门体20与机械开关50接触,从而触动机械开关50的开启;当门体20打开时,通过门体20与机械开关50断开,从而触动机械开关50关闭。
61.可以理解的是,机械开关50可以作为一个独立的装置设置在任意位置,即机械开关50可以设置在冰箱1的门体20上也可以设置在冰箱1的箱体10上,本技术对机械开关50设置的具体位置不进行限制。
62.该机械开关50在常态下属于闭合状态,且是利用机械传动实现的,故该机械开关50属于常闭型的机械开关50,实现了与干簧管开关一样的逻辑和功能,通过此开关可以实现冰箱1其他负载开关的多元选择。即同一款冰箱1可以同时使用干簧管开关和按钮开关,而不用更改软件在开关上的逻辑控制,相比较现有的按钮开关,提高了通用性。
63.以上对本技术实施例提供的一种机械开关和冰箱进行了详细介绍。本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术。同时,对于本领域的技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。