1.本实用新型涉及一种车辆用踏板装置,更详细而言,涉及一种能够防止因外部因素而错误地感测踏板的位置的车辆用踏板装置。
背景技术:
2.通常,配备于车辆的加速踏板是根据借助于驾驶员踩踏踏板的力而使踏板旋转的角度,调节吸入到发动机的空气量或喷射到发动机的燃料量来使车辆加速的装置。
3.加速踏板根据安装结构分为悬挂设置在前围板上的悬挂式和设置在地板上的风琴式,根据操作方式分为机械式和电子式。
4.在驾驶员踩踏踏板的情况以及驾驶员从踏板抬起脚的情况下,加速踏板将旋转并改变其位置,并且加速踏板的位置根据由配备于加速踏板的磁体而产生的磁场的强度来感测。
5.此时,在存在对配备于加速踏板的磁体的磁场造成影响的外部磁场的情况下,由磁体产生的磁场将变化,因此存在加速踏板的位置被异常地感测的可能。
6.因此,需要一种通过由磁体产生的磁场不受到外部磁场的影响来防止加速踏板的位置被异常感测的方法。
7.【现有技术文献】
8.【专利文献】
9.韩国公开专利公报第10-2020-0107671号(公开日:2020.09.16)
技术实现要素:
10.本实用新型是为了解决上述的问题而提出的,本实用新型期望解决的技术问题在于提供一种通过分别屏蔽由磁体产生的磁场和外部磁场的屏蔽部来防止由磁体产生的磁场和外部磁场之间发生相互干扰的车辆用踏板装置。
11.并且,提供一种在分别屏蔽由磁体产生的磁场和外部磁场的屏蔽部之间形成空气间隙来减小屏蔽部所占据的空间的车辆用踏板装置。
12.本实用新型的技术问题并不限于以上提及的技术问题,本领域技术人员可以通过下文的记载而明确理解未提及的其他技术问题。
13.为了实现所述目的,根据本实用新型的实施例的一种车辆用踏板装置可以包括:旋转臂,以旋转轴为中心可旋转地设置于踏板壳体,以借由施加于踏板垫的操作力而进行旋转;磁体,在所述旋转臂旋转时,位置发生变化;以及位置感测部,在所述旋转臂旋转时,感测所述旋转臂的位置,其中,所述位置感测部可以包括:传感器部,感测借由所述磁体而产生的磁场的强度;以及多个屏蔽部,布置成与所述磁体具有彼此不同的间隔,以屏蔽借由所述磁体及外部磁场产生源中的每一个而产生的磁场。
14.在所述多个屏蔽部之间可以形成有空气间隙(air gap)。
15.所述空气间隙的大小可以根据所述多个屏蔽部中的每一个的厚度而不同。
16.随着所述多个屏蔽部中的每一个的厚度变厚,所述空气间隙可以变小。
17.所述多个屏蔽部中的相邻的两个屏蔽部可以布置成彼此以预定间隔隔开,在所述多个屏蔽部中的相邻的两个屏蔽部之间可以布置有具有与所述隔开的间隔对应的厚度且利用非导电性材质构成的部件。
18.所述多个屏蔽部可以以所述传感器部为基准位于所述磁体的相反方向。
19.所述多个屏蔽部可以包括:第一屏蔽部,布置成与所述磁体具有第一间隔;以及第二屏蔽部,布置成与所述磁体具有大于所述第一间隔的第二间隔。
20.从所述磁体发出的磁力线中的至少一部分可以形成为沿着所述第一屏蔽部收敛于所述磁体,从所述外部磁场产生源发出的磁力线中的至少一部分可以形成为沿着所述第二屏蔽部收敛于所述外部磁场产生源。
21.所述第一屏蔽部可以屏蔽从所述磁体发出的磁力线朝向所述第二屏蔽部形成,所述第二屏蔽部可以屏蔽从所述外部磁场产生源发出的磁力线朝向所述第一屏蔽部形成。
22.在所述磁体可以沿着在所述旋转臂旋转时所述磁体的位置发生变化的位移方向及与所述位移方向垂直的方向中的至少一个方向布置有至少两个极性。
23.在所述旋转臂旋转时,所述磁体可以沿着所述旋转轴方向与所述位置感测部保持预定间隔的同时位置发生变化。
24.所述磁体可以布置成以所述旋转轴为基准沿放射方向与所述旋转轴隔开预定间隔。
25.所述磁体的中心可以布置成与所述旋转轴一致。
26.其他实施例的具体事项包括于详细的说明及附图。
27.根据如上所述的本实用新型的车辆用踏板装置,具有如下所述的一个或其以上的效果。
28.由于形成由磁体产生的磁场的磁力线和形成外部磁场的磁力线分别沿着彼此隔开地布置的多个屏蔽部而形成,因此,具有能够防止由磁体产生的磁场与外部磁场之间发生相互干扰的效果。
29.并且,在分别屏蔽由磁体产生的磁场和外部磁场的多个屏蔽部之间形成有空气间隙,因此,与多个屏蔽部一体形成的情况相比,具有能够减小所需的空间的效果。
30.本实用新型的效果并不限于以上提及的效果,本领域技术人员可以通过权利要求书的记载而明确理解未提及的其他效果。
附图说明
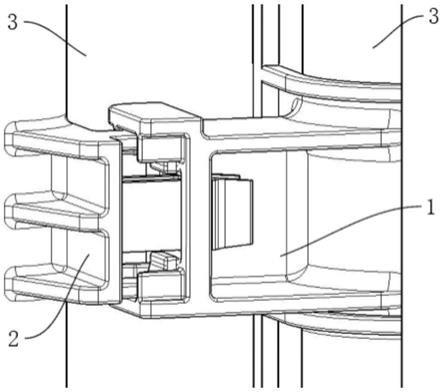
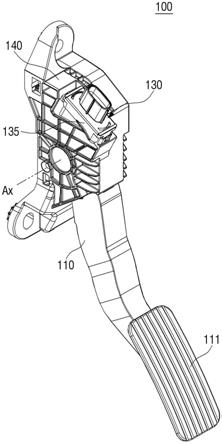
31.图1是示出根据本实用新型的实施例的车辆用踏板装置的立体图。
32.图2是示出根据本实用新型的实施例的车辆用踏板装置的分解立体图。
33.图3是示出根据本实用新型的实施例的车辆用踏板装置的侧视图。
34.图4至图7是示出根据本实用新型的实施例的磁体的示意图。
35.图8是示出借由施加于根据本实用新型的实施例的踏板垫的操作力而旋转的旋转臂的示意图。
36.图9是示出在根据本实用新型实施例的旋转臂旋转时位置发生变化的磁体的示意图。
37.图10是示出根据本实用新型的实施例的位置感测部的剖视图。
38.图11是示出根据本实用新型的实施例的位置感测部的立体图。
39.图12是示出在根据本实用新型的实施例的磁体的位置发生变化时借由位置感测部而被感测的磁力的强度的示意图。
40.图13是示出借由根据本实用新型的实施例的磁体而形成的磁力线的示意图。
41.图14是示出借由根据本实用新型的实施例的磁体及外部磁场而形成的磁力线的示意图。
42.图15是示出根据本实用新型的另一实施例的位置感测部的剖视图。
43.图16是示出根据本实用新型的另一实施例的车辆用踏板装置的侧视图。
44.附图标记说明:
45.110、220:旋转臂
46.111、210:踏板垫
47.211:连接杆
48.120、230:磁体
49.130、240:位置感测部
50.131:传感器
51.132:基板
52.133:第一屏蔽部
53.134:第二屏蔽部
54.135:壳体
55.140、250:踏板壳体
具体实施方式
56.参照与附图一起详细后述的实施例,可以明确本实用新型的优点和特征以及达成这些的方法。然而,本实用新型可以实现为彼此不同的多样的形态,并不限于以下公开的实施例,提供本实施例仅用于使本实用新型的公开完整并向本实用新型所属技术领域中具有普通知识的人完整地告知实用新型的范围,本实用新型仅由权利要求书的范围所定义。在整个说明书中,相同附图标记指代相同构成要素。
57.因此,在若干实施例中,为了避免本实用新型被模糊解释,不具体说明公知的工序步骤、公知的结构以及公知的技术。
58.本说明书中使用的术语用于说明实施例而非旨在限制本实用新型。在本说明书中,除非在语句中特别提到,否则单数型也包括复数型。说明书中使用的“包括(comprises)”和/或“包括(comprising)”表示不排除除了所提及的构成要素、步骤和/或操作之外的一个以上的其他构成要素、步骤和/或操作的存在或添加。此外,“和/或”包括上述项目中的每一个和一个以上的所有组合。
59.并且,参照作为本实用新型的理想的示例图的立体图、剖视图、侧视图和/或示意图对本说明书中描述的实施例进行说明。因此,示例图的形态可以根据制造技术和/或允许误差等而变形。因此,本实用新型的实施例不限于图示的特定形态,还包括根据制造工艺产生的形态的变化。并且,对于本实用新型所示的各个附图,考虑到说明的方便性,各个构成
要素可能被有所放大或缩小而示出。
60.以下,根据本实用新型的实施例,参照用于说明车辆用踏板装置的附图对本实用新型进行说明。
61.图1是示出根据本实用新型的实施例的车辆用踏板装置的立体图,图2 是示出根据本实用新型的实施例的车辆用踏板装置的分解立体图,图3是示出根据本实用新型的实施例的车辆用踏板装置的侧视图,图2是省略图1的踏板壳体140的一部分的情况的一示例。
62.参照图1至图3,根据本实用新型的实施例的车辆用踏板装置100可以包括旋转臂110、磁体120和位置感测部130。
63.在本实用新型的实施例中,车辆用踏板装置1是悬挂于前围板而设置的悬挂式,并以用于车辆的加速的用途而使用的情况为例进行说明,但并不限于此,本实用新型的车辆用踏板装置1也可以作为用于车辆的减速的用途而使用,也可以类似地应用于设置于车辆的地板的风琴式。
64.旋转臂110的一端部可以配备有踏板垫111,以使驾驶员用脚踩踏而施加用于使旋转臂110旋转的操作力(踏板力),并且旋转臂110可旋转地设置于踏板壳体140,以在驾驶员踩踏踏板垫111或从踏板垫111抬起脚的情况下,使得旋转臂110以旋转轴ax为中心进行旋转。
65.在本实用新型的实施例中,以车辆用踏板装置1为悬挂式的情况为例进行说明,因此,可以理解为,踏板垫111可以配备于在旋转臂110中靠近车辆的地板的一端部,旋转臂110的另一端部可旋转地设置于踏板壳体140,从而在驾驶员踩踏踏板垫111或从踏板垫111抬起脚的情况下,旋转臂110 以旋转轴ax为中心进行旋转。
66.在旋转臂110进行旋转时,磁体120的位置可以发生变化,并且在本实用新型的实施例中,以如下情形为例进行说明:磁体120设置为在旋转臂110 的靠近旋转轴ax的另一端部以旋转轴ax为基准沿放射方向与旋转轴ax隔开预定间隔,并以旋转轴ax为中心与旋转臂110一体地旋转而改变位置,但并不限于此,也可以设置为磁体120的中心与旋转轴ax一致。
67.在磁体120中,两个以上的极性可以沿着至少一个方向交替地布置,并且,两个以上的极性交替地布置意味着包括n极和s极的极性的总数为两个以上,并且n极和s极交替地布置。
68.例如,两个极性交替地布置可以理解为以n极、s极的顺序或以s极、 n极的顺序布置,三个极性交替地布置可以理解为以n极、s极、n极的顺序或以s极、n极、s极的顺序布置,四个极性交替地布置可以理解为以n 极、s极、n极、s极的顺序或以s极、n极、s极、n极的顺序布置。
69.图4至图7是示出根据本实用新型的实施例的磁体的示意图,图4至图 6是示出在磁体120的位置发生变化的位移方向为x轴方向时的磁体120的极性布置方向的一示例,图7是磁体120的中心布置成与旋转轴ax一致的情况的一示例。
70.图4是沿着与作为在旋转臂110旋转时磁体120的位置发生变化的位移方向的x轴方向垂直的z轴方向交替地布置单个n极和s极的情况的示例,图5是沿着作为在旋转臂110旋转时磁体120的位置发生变化的位移方向的 x轴方向交替地布置单个n极和s极的情况的一示例,图6是沿着作为在旋转臂110旋转时磁体120的位移方向的x轴方向和与x轴方向垂直的z轴方向分别布置两个极性的情况的一示例。
71.如上所述,形成磁力线的方向可以根据布置磁体120的极性的方向而彼此不同,使得磁力线从磁体120发出并由磁体120收敛。
72.例如,在磁体120的位移方向为x轴方向时,在图4中可以沿着z轴方向形成磁力线gz,在图5中可以沿着x轴方向形成磁力线gx,在图6中可以沿着x轴方向形成磁力线gx、-gx的同时可以沿着z轴方向形成磁力线gz、
ꢀ‑
gz。
73.此时,磁力线具有正值和负值是为了表示磁力线的方向性,在两个方向中的一个方向具有正值的情况下,可以理解为其相反方向具有负值。
74.此时,图4至图6以磁体120的极性沿着磁体120的位移方向和垂直于磁体120的位移方向的方向中的至少一个方向布置的情况为例进行说明,但是并不限于此,在磁体120的中心位于旋转臂110的旋转轴ax的情况下,磁体120的位移方向可以理解为如图7所示的以旋转轴ax为中心旋转的方向,在此情况下,在磁体120中,两个以上的极性可以沿着旋转轴ax方向和以旋转轴ax为中心的旋转方向中的至少一个方向布置,图7的磁体120是两个极性沿着以旋转轴ax为中心的旋转方向布置的情况的一示例。
75.位置感测部130感测由其位置根据旋转臂110的旋转而发生变化的磁体 120产生的磁场强度,并且输出基于感测到的磁场强度的感测信号,并且从位置感测部130输出的感测信号可以用于车辆的ecu等判断旋转臂110的位置并根据所判断的位置而控制燃烧量。
76.例如,在驾驶员踩踏踏板垫111的情况下,旋转臂110如图8所示地进行旋转,在此情况下,如图9所示,位置感测部130可以通过感测由在旋转臂110旋转时位置发生变化的磁体120所产生的磁场的强度来判断旋转臂110 的位置。
77.在本实用新型的实施例中,以如下的情况进行了说明:位置感测部130 沿着与旋转臂110的旋转轴ax平行的方向位于磁体120的一侧,在旋转臂 110旋转时磁体120与位置感测部130保持预定间隔并且位置发生变化,但是这仅是用于帮助理解本实用新型的一示例,并不限于此,磁体120的位置可以沿着旋转轴ax的方向、垂直于旋转轴ax的方向或这些组合的方向发生变化,并且可以根据磁体120的位置发生变化的方向,磁体120与位置感测部130之间的间隔将保持一致或发生变化。
78.图10是示出根据本实用新型的实施例的位置感测部的剖视图,图11是示出根据本实用新型的实施例的位置感测部的立体图,图11是省略图10的壳体135的情况的一示例。
79.参照图10和图11,根据本实用新型的实施例的位置感测部130可以包括至少一个传感器131、设置有至少一个传感器131的基板132以及多个屏蔽部133、134,其中,至少一个传感器131、基板132及多个屏蔽部133、 134可以布置为收容在壳体135内,并且可以布置为与配备于旋转臂110的磁体120相邻。
80.至少一个传感器131可以利用能够感测磁场的强度的诸如霍尔传感器等的传感器构成,并且至少一个传感器131可以包括多个传感器,以防止感测错误。
81.例如,在至少一个传感器131包括多个传感器的情况下,多个传感器中的每一个可以根据磁体120的位置而输出彼此不同的大小的感测信号,在从多个传感器中的每一个输出的感测信号之间的大小差在预定范围内的情况下,车辆的ecu可以根据相对较大的感测信号来控制燃烧量,否则可以根据相对较小的感测信号来控制燃烧量。
82.如图12所示,至少一个传感器131可以根据在旋转臂110旋转时根据磁体120的位置而变化的磁场强度来感测旋转臂110的旋转方向和旋转角度。
83.例如,在从磁体120开始进入至少一个传感器131的感测范围到磁体120 脱离至少一个传感器131的感测范围为止位置沿着一方向改变情况下,由至少一个传感器131感测到的磁场强度逐渐增加,直到磁体120到达至少一个传感器131的感测范围的中心,然后逐渐减小,直到磁体120脱离至少一个传感器131的感测范围,因此可以实现根据磁场的强度的变化来判断旋转臂 110的旋转方向和旋转角度。
84.在上述的至少一个传感器131中,在本实用新型的踏板装置1不受因外部磁场产生源而产生的外部磁场的影响的情况下,如图13所示,可以形成为从磁体120发出并重新向磁体120收敛的磁力线g1能够由至少一个传感器 131感测,但是,在存在由外部磁场产生源而产生的外部磁场的情况下,由磁体120产生的磁场受到外部磁场的影响,从而有可能发生异常感测。
85.此时,外部磁场产生源意味着能够产生足以与由磁体120产生的磁场发生相互干扰的程度的外部磁场的对象,诸如位于车辆内的具有磁性的物体或用作电动车辆的动力源的马达等。
86.在本实用新型的实施例中,通过布置成与磁体120具有彼此不同间隔的多个屏蔽部133、134,磁体120的磁场和外部磁场彼此分别屏蔽,使得由至少一个传感器131感测到的磁体120的磁场强度不受外部磁场的影响,从而防止在磁体120的磁场与外部磁场之间发生相互干扰。
87.在本实用新型的实施例中,以多个屏蔽部133、134以基板132为基准布置于磁体120的相反方向而防止磁体120的磁场与外部磁场之间发生相互干扰的情况为例进行说明,但是多个屏蔽部133、134的排列方向可以根据外部磁场所产生的方向而不同。
88.多个屏蔽部133、134可以利用具有高磁导率的材料构成,从而可以起到诱导形成磁场的磁力线的作用,以下,在本实用新型的实施例中,将多个屏蔽部133、134称为布置成与磁体120具有第一间隔d1的第一屏蔽部133和布置成与磁体120具有大于第一间隔d1的第二间隔d2的第二屏蔽部134。
89.多个屏蔽部133、134可以包括布置成与磁体120具有第一间隔d1的第一屏蔽部133和布置成与磁体120具有大于第一间隔d1的第二间隔d2的第二屏蔽部134。
90.第一屏蔽部133可以起到防止由磁体120形成的磁场对外部磁场产生影响的屏蔽作用,第二屏蔽部134可以起到防止外部磁场对由磁体120形成的磁场产生影响的屏蔽作用。
91.图14是示出借由根据本实用新型的实施例的磁体及外部磁场产生源而形成的磁力线的示意图。
92.参照图14,可以看出,在不布置多个屏蔽部133、134的情况下,从磁体120发出的磁力线g1受到外部磁场的磁力线g2的影响,从而从磁体120 发出的磁力线g1与上述的图13的情况相比,从至少一个传感器131朝向磁体120的方向移动而形成,在此情况下,由于不仅磁体120的磁场被至少一个传感器131感测,外部磁场也被至少一个传感器131感测,从而可能发生异常感测,因此存在发生针对旋转臂110的位置的错误感测的可能性。
93.在本实用新型的实施例中,第一屏蔽部133和第二屏蔽部134分别布置成与磁体120具有彼此不同的间隔,以防止由于外部磁场引起的针对旋转臂 110的位置的错误感测,在此情况下,从磁体120发出的磁力线g1的一部分形成为沿着第一屏蔽部133收敛于磁体
120,与此类似地,从外部磁场产生源发出的磁力线g2中的一部分形成为沿着第二屏蔽部134收敛于外部磁场产生源,从而防止由磁体120产生的磁场与外部磁场之间发生相互干扰。
94.在本实用新型的实施例中,第一屏蔽部133和第二屏蔽部134可以以在第一屏蔽部133与第二屏蔽部134之间形成空气间隙(air gap)a的方式以预定间隔隔开而布置,这是因为与第一屏蔽部133和第二屏蔽部134一体形成的情况相比,可以减小所需的空间。
95.即,在第一屏蔽部133和第二屏蔽部134一体地形成并且在第一屏蔽部 133与第二屏蔽部134之间没有形成空气间隙a的情况下,用于防止由磁体 120形成的磁场与外部磁场之间发生相互干扰的厚度需要相对变得更大,但是在本实用新型的实施例中,由于以在第一屏蔽部133和第二屏蔽部134以预定间隔隔开,使得在第一屏蔽部133与第二屏蔽部134之间形成空气间隙 a,因此能够使将第一屏蔽部133及第二屏蔽部134的厚度和空气间隙a的厚度相加的总厚度形成得相对较小。
96.在第一屏蔽部133与第二屏蔽部134之间形成的空气间隙a的大小可以根据第一屏蔽部133和第二屏蔽部134的厚度而不同,并且由于随着第一屏蔽部133和第二屏蔽部134的厚度增加,磁力线穿过第一屏蔽部133和第二屏蔽部134的可能性降低,因此第一屏蔽部133与第二屏蔽部134之间的空气间隙a可以相对减小。
97.在上述实施例中,以第一屏蔽部133和第二屏蔽部134的各自的两端滑动插入于壳体135而结合,并且在第一屏蔽部133与第二屏蔽部134之间形成空气间隙a的情况为例进行说明,但并不限于此,根据第一屏蔽部133和第二屏蔽部134的结合方式,即使在第一屏蔽部133与第二屏蔽部134之间没有形成空气间隙a的情况下,也可以防止由磁体120产生的磁场与外部磁场之间发生相互干扰。
98.图15是示出根据本实用新型的另一实施例的位置感测部的剖视图。
99.参照图15,在根据本实用新型的另一实施例的位置感测部130中,第一屏蔽部133的两端滑动插入于壳体135而结合,第二屏蔽部134可以通过嵌件成型而与壳体135一体地形成。
100.在第二屏蔽部134嵌件成型到壳体135的情况下,在第一屏蔽部133与第二屏蔽部134之间不形成空气间隙a,但是由于壳体135利用非导电性树脂等的材质构成,因此,即使在第一屏蔽部133与第二屏蔽部134之间不形成空气间隙a的情况下,如图14所示,从磁体120发出的磁力线g1的一部分也可以形成为沿着第一屏蔽部133收敛于磁体120,从外部磁场产生源发出的磁力线g2中的一部分可以形成为沿着第二屏蔽部134收敛于外部磁场产生源,从而可以防止由磁体120产生的磁场与外部磁场之间发生相互干扰。
101.在图15中,以在第一屏蔽部133与第二屏蔽部134之间布置有利用非导电性材质构成的壳体135的一部分的情况为例进行说明,但并不限于此,也可以布置有利用具有与第一屏蔽部133和第二屏蔽部134之间的隔开间隔对应的厚度的非导电性材质构成的单独的部件。
102.在上述的实施例中,以本实用新型的车辆用踏板装置1为悬挂式的情况为例进行了说明,但并不限于此,也可以类似地应用于本实用新型的车辆用踏板装置1为风琴式的情况。
103.图16是示出根据本实用新型的另一实施例的车辆用踏板装置的侧视图。
104.参照图16,根据本实用新型的另一实施例的车辆用踏板装置200可以包括踏板垫210、旋转臂220、磁体230及位置感测部240。
105.根据本实用新型的另一实施例的车辆用踏板装置200为风琴式,施加于踏板垫210的操作力通过连接杆211传递至位于踏板壳体250内部的旋转臂 220,随着旋转臂220旋转,配备于旋转臂220的旋转轴ax'附近的磁体230 的位置发生变化。
106.此时,与磁体230相邻地布置的位置感测部240可以根据磁体230的位置而感测磁力的强度,从而可以判断旋转臂220的旋转角度。
107.在本实用新型的另一实施例中,位置感测部240除了在位置上与上述实施例的位置感测部130存在一部分差异之外,位置感测部240可以起到与上述实施例的位置感测部130相同的作用,并且将省略其详细说明。
108.如上所述,即使在本实用新型的车辆用踏板装置1为风琴式的情况下,类似于上述的悬挂式,多个屏蔽部也为了形成空气间隙而以预定间隔布置,以防止在由磁体230形成的磁场和由外部磁场产生源形成的外部磁场之间发生相互干扰,从而如图14所示地防止在由磁体230形成的内部磁场和由外部磁场生成源形成的外部磁场之间发生干扰。
109.在本实用新型所属技术领域中具有普通知识的人员可以理解的是,本实用新型可以在不改变其技术思想或者必要特征的情况下以其他具体形态实施。因此,以上记载的实施例应当理解为在所有方面均为示例性的,而不是限定性的。本实用新型的范围通过权利要求范围来表示,而不是上述的详细说明,并且应当解释为从权利要求范围的含义及范围以及其等同概念导出的所有变更或变形的形态均包含于本实用新型的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。