1.本发明涉及口腔种植技术领域,尤其涉及一种种植牙制备种植窝温度控制系统及方法。
背景技术:
2.种植牙技术采用人工材料(如金属、陶瓷等)制成种植体(一般类似牙根形态),经手术方法植入上下颌的种植窝内并获得骨组织牢固的固位支持,通过特殊的装置和方式连接支持上部的牙修复体。
3.种植牙与种植窝的良好骨结合是口腔种植成功的前提,而种植窝的中的骨组织的活性是良好骨结合的必需条件。口腔种植的临床研究表明,种植窝制备过程中若种植窝温度大于47℃并持续超过一分钟,就极有可能发生种植窝骨灼伤,引发种植窝骨组织活性丧失,导致口腔种植的失败,后续还会导致种植窝感染。因此,在种植窝制备过程中需要对种植窝温度进行严格准确地控制是亟需解决的技术问题。
4.而国内口腔种植领域仍广泛采用医生人工制备种植窝,对种植窝温度的控制主要依赖于医生的经验,来调节种植窝制备过程中参数,从而避免种植窝的温度过高。但是这种方式过于依赖医生的个人水平,并且,医生也无法精准地知晓温度的准确值,更不能精准地反馈温度控制的效果。
5.现有技术中还存在通过种植机器人来制备种植窝的技术,但是其温度控制的手段较为简单。首先,通过钻头中的探针检测温度,温度检测的准确度不高,无法获知种植窝中的最大温度。其次,温度控制的手段通常只是在检测到温度超过阈值时,提拉钻头,停止制备,喷射冷却水。这种温度控制手段导致种植窝的制备过程多次中断,从而影响种植窝的种植效率,大大延长口腔种植的总时长,造成病患的体验较差。
6.另外,随着国民生活水平的提高,越来越多的人开始进行口腔种植,而不同年龄段的人、甚至不同体质的人的牙槽骨的骨质是不同的。在种植窝制备过程中需要用钻头在牙槽骨中高速钻进,在温度控制的过程中需要对钻头的转速进行调节。但是,不同骨质对于钻头参数的耐受度是不同的,如果钻头转速过高、进给力过大,则可能对种植窝造成不可逆的损伤。因此,在种植窝温度控制的过程中如何考虑不同人的骨质情况,也是需要解决的问题。
技术实现要素:
7.发明目的:针对以上问题,本发明提出一种种植牙制备种植窝温度控制系统及方法。
8.技术方案:
9.为实现本发明的目的,第一方面,本发明所采用的技术方案是一种种植牙制备种植窝温度控制系统,包括:
10.种植装置和控制装置;所述种植装置包括第一处理模块、温度感测模块、驱动模
块、微型摄像模块、冷却模块、第一通信模块;
11.控制装置包括配置模块、第二通信模块、计时模块、第二处理模块;
12.第一处理模块分别与温度感测模块、驱动模块、微型摄像模块、冷却模块、第一通信模块通信连接;
13.第二处理模块分别与配置模块、第二通信模块、计时模块通信连接;
14.优选地,所述配置模块用于配置种植装置的配置参数;
15.所述计时器用于统计钻头工作的持续时长;
16.所述第二处理模块用于计算种植装置的工作参数;
17.所述温度感测模块设置在种植装置的钻头内部,用于获取温度采集数据,发送至第一处理模块;
18.第一处理模块用于对温度采集数据进行处理分析,获取实时检测温度值;
19.所述驱动模块用于根据第二处理模块计算得到的工作参数驱动种植装置的钻头的旋转和进给;
20.所述工作参数包括钻头转速和进给力。
21.优选地,控制装置还包括人机交互模块,可通过人机交互模块展示实时检测温度值、种植窝的当前钻进深度、钻进时长、钻头转速。
22.优选地,控制装置还包括提示模块,所述提示模块包括声学提示模块和光学提示模块,用于发出声光提示,提示种植窝制备完成。
23.优选地,所述第一通信模块和第二通信模块均为无线通信模块;
24.第一通信模块用于与第二通信模块进行数据的双向传输。
25.优选地,所述种植装置为智能种植机器人,所述冷却模块用于喷射冷却液。
26.第二方面,本发明还提供了一种种植牙制备种植窝温度控制方法,包括:
27.步骤一、上电启动控制系统,初始化;
28.通过配置模块设置种植装置的配置参数;
29.通过种植装置的钻头中的温度感测模块获取采集数据,通过第一处理模块对采集数据进行处理分析,得到实时检测温度值;通过第一通信模块与第二通信模块将实时检测温度值发送至第二处理模块;
30.步骤二、进入种植窝制备的第一阶段,第二处理模块生成第一工作参数并发送至种植装置,种植装置以第一工作参数在牙槽骨中钻孔;第一阶段的持续时间长度为第一预设时长t1;其中,第一工作参数包括钻头转速n1,进给力f1;
31.通过驱动模块提拉种植装置的钻头,使其撤出种植窝,通过钻头侧的微型摄像模块采集种植窝图像,将种植窝图像传输至第一处理模块,第一处理模块对图像进行处理分析,获取种植窝制备的第一阶段的种植窝直径d1;
32.通过驱动模块获取钻头的进给速度实时值feed1,计算种植窝制备的第一阶段的钻取深度:
33.h1=∫(feed1*t1)dt;
34.第二处理模块根据钻取深度h1和种植窝直径d1计算牙槽骨的骨质系数:
35.c=1/(α*h1 β*d1)=1/(α*∫(feed1*t1)dt β*d1);
36.其中α、β均为标准化系数;
37.记录第一阶段结束时的温度检测值t0,进入步骤三;
38.步骤三、进入种植窝制备的第二阶段,第二处理模块生成第二工作参数并发送至种植装置,种植装置以第二工作参数在牙槽骨中继续钻孔;
39.其中,第二工作参数包括钻头转速n2,进给力f1;第二处理模块通过下式计算钻头转速n2:
40.n2=(1 γ c)*n1;
41.其中,γ为标准化系数,c为步骤二中计算获取的所述骨质参数;
42.实时监测种植窝的深度,判断深度是否达到目标深度h,若是,则进入步骤六;否则,通过种植装置的钻头中的温度感测模块实时检测温度值,当检测到所述实时温度检测值达到第一临界温度t1时,进入步骤四,若实时温度检测值未达到第一临界温度t1,则种植装置以第二工作参数在牙槽骨中继续钻孔;
43.步骤四、进入种植窝制备的第三阶段,第二处理模块生成第三工作参数并发送至种植装置,种植装置以第三工作参数在牙槽骨中继续钻孔;
44.其中,第三工作参数包括钻头转速n3,进给力f1;
45.第二处理模块通过下式计算钻头转速n3:
46.n3=d*n2;
47.其中,d为钻取进度系数,0≤d<1,按照下式计算:
48.d=λ*(h-h
1-h2)/h;
49.其中,λ为标准化系数,h为种植窝的目标制备深度,h1为第一阶段的钻取深度,h2第二阶段的钻取深度;
50.实时监测种植窝的深度,判断深度是否达到目标制备深度h,若是,则进入步骤六;否则,通过种植装置的钻头中的温度感测模块实时检测温度值,当检测到所述实时温度检测值达到第二临界温度t2时,进入步骤五,当检测到所述实时温度检测值未达到第二临界温度t2时,以第三工作参数在牙槽骨中继续钻孔;
51.步骤五、暂停钻头的工作,通过冷却模块喷射冷却液降温,等待温度降低到t0以下,返回步骤三继续制备种植窝;
52.步骤六、通过驱动模块提拉种植装置的钻头,使其撤出种植窝,通过提示模块发出声光提示,提示种植窝制备完成。
53.优选地,t0<第一临界温度t1<第二临界温度t2<47℃。
54.优选地,所述通过种植装置的钻头中的温度感测模块获取采集数据,通过处理模块对采集数据进行处理分析,得到实时检测温度值,包括:
55.对采集数据进行滤波处理,ad转换处理,标准化处理。
56.优选地,所述实时监测种植窝的深度,判断深度是否达到目标深度h,包括:
57.通过种植装置中的位移传感模块实时监测钻具的钻进深度,作为种植窝的深度。
58.第三方面,本发明还提供了一种种植牙制备种植窝温度控制装置,包括:
59.配置模块,用于设置种植装置的配置参数;
60.第二通信模块,用于与种植装置的第一通信模块通信连接,接收第一通信模块发送的实时检测温度值,所述实时检测温度值,是将种植装置的钻头中的温度感测模块获取的采集数据经过第一处理模块的处理分析后得到的;所述第二通信模块还用于将实时检测
温度值发送至第二处理模块;
61.所述第二处理模块包含第一阶段处理单元,用于控制种植装置进入种植窝制备的第一阶段;第一阶段处理单元还用于生成第一工作参数并发送至种植装置,使种植装置以第一工作参数制备种植窝;其中,第一阶段的持续时间长度为第一预设时长t1;所述第一工作参数包括钻头转速n1,进给力f1;
62.第一阶段处理单元还用于在第一阶段的持续时长达到第一预设时长t1时,发送撤离指令至种植装置,令种植装置通过驱动模块提拉种植装置的钻头,使其撤出种植窝,并通过钻头侧的微型摄像模块采集种植窝图像,令第一处理模块对图像进行处理分析,获取种植窝制备的第一阶段的种植窝直径d1;通过驱动模块获取钻头的进给速度实时值feed1,计算种植窝制备的第一阶段的钻取深度h1:h1=∫(feed1*t1)dt;
63.第二处理模块还包括骨质系数计算单元,用于根据钻取深度h1和种植窝直径d1计算牙槽骨的骨质系数c,并记录第一阶段结束时的温度检测值t0;其中,c=1/(α*h1 β*d1)=1/(α*∫(feed1*t1)dt β*d1);α、β均为标准化系数;
64.第二处理模块还包括第二阶段处理单元,用于控制种植装置在第一阶段结束后进入种植窝制备的第二阶段,并生成第二工作参数并发送至种植装置,令种植装置以第二工作参数制备种植窝;其中,第二工作参数包括钻头转速n2,进给力f1;第二阶段处理单元通过下式计算钻头转速n2:n2=(1 γ c)*n1;γ为标准化系数;
65.第二处理模块还包括第三阶段处理单元,用于当检测到所述实时温度检测值达到第一临界温度t1时,控制种植装置进入种植窝制备的第三阶段,并生成第三工作参数并发送至种植装置,令种植装置以第三工作参数制备种植窝;其中,第三工作参数包括钻头转速n3,进给力f1;第三阶段处理单元通过下式计算钻头转速n3:n3=d*n2;d为钻取进度系数,0≤d<1,按照下式计算:d=λ*(h-h
1-h2)/h;λ为标准化系数,h为种植窝的目标制备深度,h1为第一阶段的钻取深度,h2第二阶段的钻取深度;
66.第二处理模块还包括冷却处理单元,用于在检测到实时温度检测值达到第二临界温度t2时,生成冷却控制指令并发送至种植装置,暂停钻头的工作,通过冷却模块喷射冷却液降温,等待温度降低到t0以下后,再进入第一阶段;
67.第二处理模块还包括深度监测单元,用于实时监测种植窝的深度,当监测到深度达到目标深度h时,则生成撤离指令至种植装置,通过驱动模块提拉种植装置的钻头,使其撤出种植窝,通过第二处理模块中的提示模块发出声光提示,提示种植窝制备完成。
68.优选的,t0<第一临界温度t1<第二临界温度t2<47℃。
69.优选的,控制装置还包括初始化模块,用于向种植装置发送初始化指令。
70.优选的,控制装置还包括故障诊断模块,用于对控制装置进行故障自检,以及对种植装置进行故障诊断。
71.优选的,控制装置还包括人机交互模块、提示模块;所述人机交互模块用于展示实时检测温度值、种植窝的当前钻进深度、钻进时长、钻头转速;所述提示模块包括声学提示模块和光学提示模块,用于发出声光提示,提示种植窝制备完成。
72.本发明相对于现有技术具有以下有益效果:
73.1、本发明的种植窝温度控制系统和方法,能够分多个阶段地对种植窝的制备过程进行温度控制,动态地调节种植装置的工作参数,温度控制准确,不依赖医生经验。并且,设
置了多个临界温度进行分阶段的温度控制,能够避免温度骤然上升超过最大阈值,能够保证种植窝的温度处于安全范围内,避免对骨组织产生不可逆的损伤,安全性高。
74.2、本发明的种植窝温度控制系统和方法,能够根据温度实时检测值,并根据温度值适应性地调节钻头的参数,针对不同的情况,自适应地调节钻头的工作参数,而不是简单地暂停制备种植窝,能够避免种植窝制备过程的频繁中断,大大提高了种植窝的制备效率。
75.3、本发明的种植窝温度控制系统和方法,充分考虑了不同用户的骨质情况。能够通过第一阶段的钻取结果,自动地获取用户的骨质情况。在后续阶段中需要提高钻头的工作参数等级时,根据自动获取的骨质情况,调节后续阶段的工作参数。能够避免工作参数的等级过高而对骨质较差的牙槽骨造成损伤。
76.4、本发明的种植窝温度控制系统和方法,建立种植窝制备过程的牙槽骨温度场模型,获取对应的牙槽骨最大温度值,作为实时检测温度值。因此,本发明能够准确计算种植窝的最大温度值,避免种植窝的温度过高而产生不可逆的损伤。
77.5、本发明的种植窝温度控制系统和方法,能够根据种植窝制备的当前深度,调整种植装置的工作参数,从而在降低温升速度的同时,尽可能提高种植窝的制备效率。
附图说明
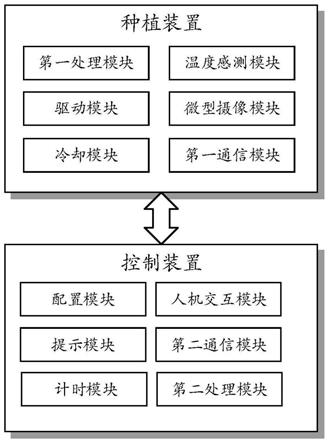
78.图1是种植牙制备种植窝温度控制系统结构示意图;
79.图2是种植牙制备种植窝温度控制方法流程图。
具体实施方式
80.下面结合附图和实施例对本发明的技术方案作进一步的说明。
81.实施例一:
82.如图1所示,本发明中的一种种植牙制备种植窝温度控制系统,包括:
83.种植装置和控制装置;所述种植装置包括第一处理模块、温度感测模块、驱动模块、微型摄像模块、冷却模块、第一通信模块;
84.控制装置包括配置模块、第二通信模块、计时模块、第二处理模块;
85.第一处理模块分别与温度感测模块、驱动模块、微型摄像模块、冷却模块、第一通信模块通信连接;
86.第二处理模块分别与配置模块、第二通信模块、计时模块通信连接;
87.所述配置模块用于配置种植装置的配置参数;
88.所述计时器用于统计钻头工作的持续时长;
89.所述第二处理模块用于计算种植装置的工作参数;
90.所述温度感测模块设置在种植装置的钻头内部,用于获取温度采集数据,发送至第一处理模块;
91.第一处理模块用于对温度采集数据进行处理分析,获取实时检测温度值;
92.所述驱动模块用于根据第二处理模块计算得到的工作参数驱动种植装置的钻头的旋转和进给;
93.所述工作参数包括钻头转速和进给力。
94.控制装置还包括人机交互模块,可通过人机交互模块展示实时检测温度值、种植
窝的当前钻进深度、钻进时长、钻头转速。
95.控制装置还包括提示模块,所述提示模块包括声学提示模块和光学提示模块,用于发出声光提示,提示种植窝制备完成。
96.所述第一通信模块和第二通信模块均为无线通信模块;
97.第一通信模块用于与第二通信模块进行数据的双向传输。
98.所述种植装置为智能种植机器人,所述冷却模块用于喷射冷却液。
99.实施例二:
100.如图2所示,本发明中的一种种植牙制备种植窝温度控制方法,包括:
101.步骤一、上电启动控制系统,初始化;
102.通过配置模块设置种植装置的配置参数;
103.通过种植装置的钻头中的温度感测模块获取采集数据,通过第一处理模块对采集数据进行处理分析,得到实时检测温度值;通过第一通信模块与第二通信模块将实时检测温度值发送至第二处理模块;
104.控制装置建立种植窝制备过程的牙槽骨温度场模型,根据温度场模型获取多组采集数据与牙槽骨最大温度值,基于最小二乘法拟合采集数据与牙槽骨最大温度值的拟合曲线;而后,根据通过种植装置的钻头中的温度感测模块获取采集数据,获取对应的牙槽骨最大温度值,作为实时检测温度值。
105.步骤二、进入种植窝制备的第一阶段,第二处理模块生成第一工作参数并发送至种植装置,种植装置以第一工作参数在牙槽骨中钻孔;第一阶段的持续时间长度为第一预设时长t1;其中,第一工作参数包括钻头转速n1,进给力f1;
106.通过驱动模块提拉种植装置的钻头,使其撤出种植窝,通过钻头侧的微型摄像模块采集种植窝图像,将种植窝图像传输至第一处理模块,第一处理模块对图像进行处理分析,获取种植窝制备的第一阶段的种植窝直径d1;
107.通过驱动模块获取钻头的进给速度实时值feed1,计算种植窝制备的第一阶段的钻取深度:
108.h1=∫(feed1*t1)dt;
109.第二处理模块根据钻取深度h1和种植窝直径d1计算牙槽骨的骨质系数:
110.c=1/(α*h1 β*d1)=1/(α*∫(feed1*t1)dt β*d1);
111.其中α、β均为标准化系数;
112.记录第一阶段结束时的温度检测值t0,进入步骤三;
113.第一工作参数的等级较低,不会产生很高的热量,所以温度的上升是相对比较缓慢的,因此第一阶段结束时的温度检测值是远远小于第一临界温度的,并且钻取深度也是远远不及目标深度的。
114.步骤三、进入种植窝制备的第二阶段,第二处理模块生成第二工作参数并发送至种植装置,种植装置以第二工作参数在牙槽骨中继续钻孔;
115.其中,第二工作参数包括钻头转速n2,进给力f1;第二处理模块通过下式计算钻头转速n2:
116.n2=(1 γ c)*n1;
117.其中,γ为标准化系数,c为步骤二中计算获取的所述骨质参数;
118.实时监测种植窝的深度,判断深度是否达到目标深度h,若是,则进入步骤六;否则,通过种植装置的钻头中的温度感测模块实时检测温度值,当检测到所述实时温度检测值达到第一临界温度t1时,进入步骤四,若实时温度检测值未达到第一临界温度t1,则种植装置以第二工作参数在牙槽骨中继续钻孔;
119.第二工作参数的等级明显高于第一工作参数,可以是第一工作参数的n倍,这么设置的目的在于以较高的转速钻孔,提高种植窝的制备效率。但是,转速的提高并不是无限制的,一方面收到温度控制的限制,另一方面还根据客户的牙槽骨的骨质参数进行转速的调整,兼顾了安全、质量和效率。
120.步骤四、进入种植窝制备的第三阶段,第二处理模块生成第三工作参数并发送至种植装置,种植装置以第三工作参数在牙槽骨中继续钻孔;
121.其中,第三工作参数包括钻头转速n3,进给力f1;
122.第二处理模块通过下式计算钻头转速n3:
123.n3=d*n2;
124.其中,d为钻取进度系数,0≤d<1,按照下式计算:
125.d=λ*(h-h
1-h2)/h;
126.其中,λ为标准化系数,h为种植窝的目标制备深度,h1为第一阶段的钻取深度,h2第二阶段的钻取深度;
127.实时监测种植窝的深度,判断深度是否达到目标制备深度h,若是,则进入步骤六;否则,通过种植装置的钻头中的温度感测模块实时检测温度值,当检测到所述实时温度检测值达到第二临界温度t2时,进入步骤五,当检测到所述实时温度检测值未达到第二临界温度t2时,以第三工作参数在牙槽骨中继续钻孔;
128.当达到第一临界温度时,表明此时的种植窝温度已经较高了,此时若仍然以转速n2继续钻进,则会导致温度继续快速上升,从而导致温度快速达到47℃,为了避免这种情况,需要进入下一个阶段,即第三阶段,并将转速下调至n3从而降低温度上升的速度。
129.此处n3的具体调整规则是依据当前的种植窝制备进度而调整的,例如,若h1 h2=0.2h,则d=λ*(h-h
1-h2)/h=0.8λ,则n3=d*n2=0.8λ*n2;即,表明第一阶段和第二阶段的钻取进度较小时,需要n3以较快的转速工作,从而提高效率。
130.若h1 h2=0.7h,则d=λ*(h-h
1-h2)/h=0.3λ,则n3=d*n2=0.3λ*n2;即,表明第一阶段和第二阶段的钻取进度较高时,则n3以较低的转速工作,即可兼顾温度和效率两方面因素。
131.对于极限情况h1 h2=h,则d=λ*(h-h
1-h2)/h=0,则n3=d*n2=0;即,表明在第二阶段的结束的时候,已经达到了目标制备深度,种植窝制备完毕,则计算出n3=0,说明无需继续钻取了。
132.这种方式,既能够避免温度上升过快,又能够控制转速在合理范围继续工作,提高种植窝的效率,并且还能准确计算出制备完毕的状态,避免过度钻孔而对口腔造成损伤。
133.步骤五、暂停钻头的工作,通过冷却模块喷射冷却液降温,等待温度降低到t0以下,返回步骤三继续制备种植窝;
134.步骤六、通过驱动模块提拉种植装置的钻头,使其撤出种植窝,通过提示模块发出声光提示,提示种植窝制备完成。
135.其中,t0<第一临界温度t1<第二临界温度t2<47℃。
136.所述通过种植装置的钻头中的温度感测模块获取采集数据,通过处理模块对采集数据进行处理分析,得到实时检测温度值,包括:
137.对采集数据进行滤波处理,ad转换处理,标准化处理。
138.所述实时监测种植窝的深度,判断深度是否达到目标深度h,包括:
139.通过种植装置中的位移传感模块实时监测钻具的钻进深度,作为种植窝的深度。
140.实施例三:
141.本发明还提供了一种种植牙制备种植窝温度控制装置,包括:
142.配置模块,用于设置种植装置的配置参数;
143.第二通信模块,用于与种植装置的第一通信模块通信连接,接收第一通信模块发送的实时检测温度值,所述实时检测温度值,是将种植装置的钻头中的温度感测模块获取的采集数据经过第一处理模块的处理分析后得到的;所述第二通信模块还用于将实时检测温度值发送至第二处理模块;
144.所述第二处理模块包含第一阶段处理单元,用于控制种植装置进入种植窝制备的第一阶段;第一阶段处理单元还用于生成第一工作参数并发送至种植装置,使种植装置以第一工作参数制备种植窝;其中,第一阶段的持续时间长度为第一预设时长t1;所述第一工作参数包括钻头转速n1,进给力f1;
145.第一阶段处理单元还用于在第一阶段的持续时长达到第一预设时长t1时,发送撤离指令至种植装置,令种植装置通过驱动模块提拉种植装置的钻头,使其撤出种植窝,并通过钻头侧的微型摄像模块采集种植窝图像,令第一处理模块对图像进行处理分析,获取种植窝制备的第一阶段的种植窝直径d1;通过驱动模块获取钻头的进给速度实时值feed1,计算种植窝制备的第一阶段的钻取深度h1:h1=∫(feed1*t1)dt;
146.第二处理模块还包括骨质系数计算单元,用于根据钻取深度h1和种植窝直径d1计算牙槽骨的骨质系数c,并记录第一阶段结束时的温度检测值t0;其中,c=1/(α*h1 β*d1)=1/(α*∫(feed1*t1)dt β*d1);α、β均为标准化系数;
147.第二处理模块还包括第二阶段处理单元,用于控制种植装置在第一阶段结束后进入种植窝制备的第二阶段,并生成第二工作参数并发送至种植装置,令种植装置以第二工作参数制备种植窝;其中,第二工作参数包括钻头转速n2,进给力f1;第二阶段处理单元通过下式计算钻头转速n2:n2=(1 γ c)*n1;γ为标准化系数;
148.第二处理模块还包括第三阶段处理单元,用于当检测到所述实时温度检测值达到第一临界温度t1时,控制种植装置进入种植窝制备的第三阶段,并生成第三工作参数并发送至种植装置,令种植装置以第三工作参数制备种植窝;其中,第三工作参数包括钻头转速n3,进给力f1;第三阶段处理单元通过下式计算钻头转速n3:n3=d*n2;d为钻取进度系数,0≤d<1,按照下式计算:d=λ*(h-h
1-h2)/h;λ为标准化系数,h为种植窝的目标制备深度,h1为第一阶段的钻取深度,h2第二阶段的钻取深度;
149.第二处理模块还包括冷却处理单元,用于在检测到实时温度检测值达到第二临界温度t2时,生成冷却控制指令并发送至种植装置,暂停钻头的工作,通过冷却模块喷射冷却液降温,等待温度降低到t0以下后,再进入第一阶段;
150.第二处理模块还包括深度监测单元,用于实时监测种植窝的深度,当监测到深度
达到目标深度h时,则生成撤离指令至种植装置,通过驱动模块提拉种植装置的钻头,使其撤出种植窝,通过第二处理模块中的提示模块发出声光提示,提示种植窝制备完成。
151.其中,t0<第一临界温度t1<第二临界温度t2<47℃。
152.控制装置还包括初始化模块,用于向种植装置发送初始化指令。
153.控制装置还包括故障诊断模块,用于对控制装置进行故障自检,以及对种植装置进行故障诊断。
154.控制装置还包括人机交互模块、提示模块;所述人机交互模块用于展示实时检测温度值、种植窝的当前钻进深度、钻进时长、钻头转速;所述提示模块包括声学提示模块和光学提示模块,用于发出声光提示,提示种植窝制备完成。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
