1.本技术涉及餐具清洗设备的技术领域,尤其是涉及一种自动调节洗涤时间的高效节能洗碗机。
背景技术:
2.目前,洗碗机是一种能够对碗、筷、盘、碟、刀、叉等餐具进行自动清洗的设备。商用的洗碗机按结构可分为柜式、罩式、篮传式、带传式、超声波式等五大类,其自动化的清洗功能极大地减轻了人们的劳动强度,提高了人们做家务的效率。
3.现有的带传式洗碗机包括机体、清洗室、水箱、清洗机构、餐具框以及传送机构,传送机构用于将餐具框输送至清洗室内,从而便于清洗机构对餐具进行清洗。
4.洗碗机的主要功能是对餐具进行自动清洗,从而去除餐具上粘接的污渍。但是,相关技术中,一般是清洗人员根据餐具的数量和污垢的种类,人工设定清洗的时间和添加清洗剂,时间控制不准确,从而导致清洗不干净或者洗涤剂的浪费。
技术实现要素:
5.本技术提供一种自动调节洗涤时间的高效节能洗碗机,具有能够自动调节洗涤时间的功能。
6.本技术提供的一种自动调节洗涤时间的高效节能洗碗机,采用如下的技术方案:一种自动调节洗涤时间的高效节能洗碗机,包括用于为餐具提供清洗空间的清洗室、用于将餐具传入或传出清洗室的链道以及设置于清洗室内用于对餐具进行清洗的清洗机构,所述清洗室上设置有至少一个连通清洗室内外的通孔;还包括摄像头、餐具检测装置、控制器、门板以及驱动机构;所述摄像头设置于清洗室外,一个所述摄像头对应一个通孔,所述摄像头用于透过通孔采集清洗室内的餐具的图像信息;所述门板和通孔一一对应设置,所有的驱动机构用于驱动所有的门板移动;所述餐具检测装置用于检测餐具是否位于清洗室内;所述控制器与摄像头、链道、餐具检测装置、驱动机构以及清洗机构连接,所述控制器被配置为:当餐具检测装置检测到餐具位于清洗室内时,控制器控制驱动机构驱动门板移动使通孔打开,并控制摄像头开启;控制器根据摄像头采集所得的图像信息判断餐具上是否有污渍;若是,控制驱动机构驱动门板移动使通孔关闭,控制清洗机构启动预设时长,并重复上述过程;若否,控制驱动机构驱动门板移动使通孔关闭,并控制链道将清洗室内的餐具传出。
7.通过采用上述技术方案,本技术在保障对餐具的清洗效果的基础上,能够自动控制清洗机构的清洗时间;摄像头通过门板与清洗室内隔离,既实现了采集清洗室内餐具图
像的目的,也有利于避免清洗过程中污染摄像头,从而便于准确判断餐具的清洁程度,进而能够准确判断对餐具的清洗时间。
8.作为优选,所述摄像头至少设置有三组,设置于清洗室外至少三个不同的位置,用于从至少三个不同的角度对餐具图像进行采集。
9.通过采用上述技术方案,摄像头设置于清洗室的三个不同的位置,便于从三个不同的角度对餐具图像进行采集,从而便于使采集的污渍信息更加准确。
10.作为优选,所述通孔成对设置,成对的通孔相邻,所述驱动机构设置于成对的两个通孔之间,所述驱动机构包括安装于清洗室上的驱动电机、固接于驱动电机输出轴的齿轮以及位于齿轮两侧且相互平行的第一齿条和第二齿条,所述第一齿条的一端与成对门板中的一个的侧壁固定连接,所述第二齿条的一端与成对门板中的另一个的侧壁固定连接,所述第一齿条、第二齿条均与齿轮啮合,每个所述驱动电机均与控制器连接。
11.通过采用上述技术方案,当控制器控制驱动电机工作时,驱动电机的输出轴转动驱动齿轮转动,齿轮转动驱动第一齿条和第二齿条同时移动,从而驱动相邻两个门板同时移动,进而使相邻的两个通孔同时开启或关闭。
12.作为优选,所述第一齿条靠近清洗室的侧壁固定连接有第一燕尾条,所述第二齿条靠近清洗室的侧壁固定连接有第二燕尾条,所述清洗室的室壁上位于第一齿条的位置开设有第一燕尾槽,所述清洗室的室壁上位于第二齿条的位置开设有第二燕尾槽,所述第一燕尾槽、第二燕尾槽均与相邻两个通孔排列所在的直线平行,所述第一燕尾条滑移连接于第一燕尾槽,所述第二燕尾条滑移连接于第二燕尾槽。
13.通过采用上述技术方案,第一燕尾槽对第一燕尾条具有导向的作用,第二燕尾槽对第二燕尾条具有导向的作用,从而提高了相邻两个门板移动时的稳定性。
14.作为优选,每个所述门板靠近清洗室的侧壁均固接有密封垫,所述密封垫与清洗室的室壁抵接且相对滑移;所述第一燕尾槽、第二燕尾槽均与通孔不连通。
15.通过采用上述技术方案,密封垫的设置提高了门板的密封性能,第一燕尾槽、第二燕尾槽均与通孔不连通,从而降低了水花通过通孔进入第一燕尾槽或者第二燕尾槽内的概率。
16.作为优选,还包括照明装置,所述照明装置设置于清洗室内或外;位于清洗室内的照明装置用于对清洗室内进行照明,位于清洗室外的照明装置用于在通孔处于打开状态时对清洗室内进行照明。
17.通过采用上述技术方案,照明装置的设置便于对清洗室内提供照明,从而便于使摄像头采集的餐具图像更加清晰。
18.作为优选,所述餐具检测装置为接近开关,所述接近开关位于清洗室内。
19.通过采用上述技术方案,接近开关的设置便于检测到餐具位于清洗室内。
20.作为优选,所述控制器被进一步配置为:根据摄像头采集所得的图像信息判断餐具上的污渍量,并基于污渍量与时长量的匹配关系,根据餐具上的污渍量确定预设时长的时长量。
21.通过采用上述技术方案,通过污渍量匹配时长量,从而便于使清洗机构工作的时长更加准确。
22.综上所述,本技术具有以下有益效果:
本技术在保障对餐具的清洗效果的基础上,能够自动控制清洗机构的清洗时间;摄像头通过门板与清洗室内隔离,既实现了采集清洗室内餐具图像的目的,也有利于避免清洗过程中污染摄像头,从而便于准确判断餐具的清洁程度,进而能够准确判断对餐具的清洗时间。
附图说明
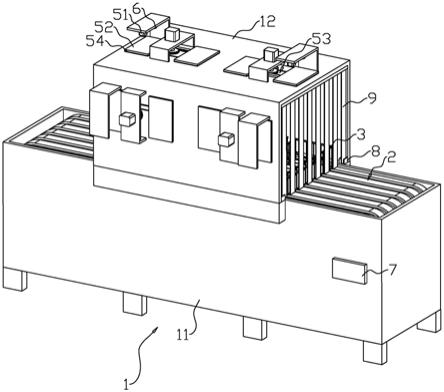
23.图1是本技术实施例的整体结构示意图。
24.图2是本技术实施例的清洗室的内部结构示意图。
25.图3是图2中a处的局部放大图。
26.附图标记说明:1、机体;11、工作台;12、清洗室;121、通孔;122、第一燕尾槽;123、第二燕尾槽;2、链道;3、餐具框;51、摄像头;52、门板;53、驱动机构;531、驱动电机;532、齿轮;533、第一齿条;534、第二齿条;535、第一燕尾条;54、密封垫;6、照明装置;7、控制器;8、餐具检测装置;9、遮水帘。
具体实施方式
27.本技术公开一种自动调节洗涤时间的高效节能洗碗机,参照图1和图2,自动调节洗涤时间的高效节能洗碗机包括机体1、链道2、餐具框3以及餐具检测装置8。
28.参照图1和图2,机体1包括工作台11和清洗室12,工作台11放置于地面,用于支撑清洗室12。清洗室12安装于工作台11顶部的中间位置,清洗室12用于为餐具提供清洗空间。清洗室12的内部中空设置,且清洗室12沿机体1的长度方向的端面与清洗室12的内部连通设置。清洗室12内设置有清洗机构,清洗机构用于对位于清洗室12内的餐具进行清洗。为了降低清洗机构泵压出的洗涤液(清洗剂与清水的混合液体或者单纯为清水)从清洗室12的端面喷出的概率,清洗室12两端的端面均安装有遮水帘9。
29.参照图1和图2,链道2转动连接于工作台11的顶部,链道2沿工作台11的长度方向延伸,且链道2贯穿清洗室12设置。餐具框3用于放置餐具,且餐具框3放置于链道2上。餐具检测装置8为接近开关,接近开关安装于清洗室12内,用于检测餐具到达清洗室12内。
30.参照图2和图3,清洗室12的室壁上开设有至少一个连通清洗室12内外的通孔121,通孔121成对设置,且成对的通孔121相邻。自动调节洗涤时间的高效节能洗碗机还包括摄像头51、控制器7、门板52以及驱动机构53。摄像头51、门板52以及通孔121三者一一对应设置,摄像头51通过安装架安装于清洗室12的外侧壁,用于透过通孔121采集清洗室12内餐具的图像信息。摄像头51至少设置有三组,本实施例中,摄像头51安装于清洗室12的顶部、前侧以及后侧。摄像头51也可以设置有四组,依次安装于清洗室12的顶部、底部、前侧以及后侧,并通过门板52进行遮挡,从而降低污渍或者水花粘接在摄像头51的镜头上的概率。
31.参照图2和图3,为了便于对清洗室12内进行照明,从而便于使摄像头51采集到的清洗室12内的餐具的图像信息更加清晰。清洗室12内或者清洗室12外还安装有照明装置6,位于清洗室12内的照明装置6为防水的led照明灯,从而便于直接对清洗室12内进行照明。位于清洗室12外的照明装置6为筒灯,用于在通孔121处于打开状态时透过通孔121为清洗室12内进行照明。
32.参照图2和图3,通孔121为方形孔,门板52为方形板,且门板52的边长大于通孔121
的边长。驱动机构53用于驱动门板52沿相邻两个通孔121排列所在的直线方向移动,从而便于使通孔121打开或者关闭。为了提高门板52的密封性能,门板52靠近清洗室12的侧壁固定连接有密封垫54,密封垫54由硫化橡胶制成。密封垫54与清洗室12的室壁抵接且相对滑移。
33.参照图2和图3,驱动机构53设置于相邻两个通孔121之间,用于驱动相邻两个门板52同时移动。驱动机构53包括驱动电机531、齿轮532、第一齿条533以及第二齿条534,驱动电机531通过安装支架安装于清洗室12的室壁,齿轮532与驱动电机531的输出轴同轴固定连接。第一齿条533的一端固定连接于成对的一个门板52靠近驱动电机531的一端,第二齿条534的一端固定连接于成对的另一个门板52靠近驱动电机531的一端。第一齿条533与第二齿条534相互平行且位于齿轮532的两侧,第一齿条533、第二齿条534均与齿轮532啮合。
34.参照图2和图3,为了提高成对的两个门板52移动时的稳定性,第一齿条533靠近清洗室12的侧壁固定连接有第一燕尾条535,第二齿条534靠近清洗室12的侧壁固定连接有第二燕尾条。清洗室12的室壁位于第一齿条533的位置开设有第一燕尾槽122,清洗室12的室壁位于第二齿条534的位置开设有第二燕尾槽123。第一燕尾槽122、第二燕尾槽123均与相邻两个通孔121排列所在的直线平行,第一燕尾条535滑移连接于第一燕尾槽122,第二燕尾条滑移连接于第二燕尾槽123。第一燕尾槽122、第二燕尾槽123均与通孔121不连通,从而降低进入通孔121内的水花进入第一燕尾槽122或者第二燕尾槽123内的概率。
35.参照图2和图3,驱动机构53、门板52、第一燕尾条535、第二燕尾条、第一燕尾槽122、第二燕尾槽123可以设置于清洗室12的内侧室壁,也可以设置于清洗室12的外侧室壁。当驱动机构53设置于清洗室12内时,通过密封盒对驱动电机531进行密封。
36.参照图2和图3,控制器7安装于机体1上,摄像头51、链道2、餐具检测装置8、驱动电机531、以及清洗机构均与控制器7连接。控制器7被配置为:控制器7先启动链道2工作,操作人员依次将盛装有餐具的餐具框3放置在链道2上随链道2移动。当餐具检测装置8检测到餐具位于清洗室12内时,控制器7控制链道2停止,从而使餐具停留在清洗室12内。控制器7控制驱动机构53驱动门板52移动,从而使通孔121打开,同时使照明装置6打开,对清洗室12内进行照明,并控制摄像头51开启。
37.参照图2和图3,控制器7根据摄像头51采集所得的图像信息判断餐具上是否有污渍。若是,控制驱动机构53驱动门板52移动使通孔121关闭,控制清洗机构启动预设时长,并重复上述过程;若否,控制驱动机构53驱动门板52移动,从而使通孔121关闭,并控制链道2将清洗室12内的餐具传出。同时,控制器7根据摄像头51采集所得的图像信息判断餐具上的污渍量,并基于污渍量与时长量的匹配关系,根据餐具上的污渍量确定预设时长的时长量。
38.本实施例中,餐具上的污渍量具体通过餐具上污渍的总面积确定,控制器7内预存储有第一面积阈值和第二面积阈值,第一面积阈值小于第二面积阈值,通过特征识别技术,根据清洗室12内的图像信息确定餐具上的污渍的总面积,污渍的总面积处于不大于第一面积阈值的总面积范围对应第一时长,污渍的总面积大于第一面积阈值但不大于第二面积阈值对应第二时长,污渍的总面积大于第二面积阈值对应第三时长,控制器7通过判断餐具的污渍的总面积处于的范围,对应预设时长为第一时长、第二时长或第三时长。
39.本实施例的实施原理为:当餐具检测装置8检测到餐具位于清洗室12内时,控制器7控制链道2停止,从而使餐具停留在清洗室12内。控制器7控制驱动机构53驱动门板52移动,从而使通孔121打开,同
时使照明装置6打开,对清洗室12内进行照明,并控制摄像头51开启。
40.控制器7根据摄像头51采集所得的图像信息判断餐具上是否有污渍。若是,控制驱动机构53驱动门板52移动使通孔121关闭,控制清洗机构启动预设时长,并重复上述过程;若否,控制驱动机构53驱动门板52移动,从而使通孔121关闭,并控制链道2将清洗室12内的餐具传出。
41.本技术中,将摄像头51安装在清洗室12的外侧,且通过门板52的遮挡作用,有效降低了相关技术中将摄像装置放置在清洗室12内,污渍或水花等会污染摄像装置的镜头的概率。因此,采集的图像信息更加清晰。
42.其次,通过设置第一时长、第二时长或第三时长,且第一时长、第二时长或第三时长为动态值,从而便于餐具在对应时长内尽可能清洗干净,从而更加省时且高效。
43.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。