1.本发明涉及自动化有机合成化工设备技术领域,具体涉及一种多功能反应智能监测系统。
背景技术:
2.随着自动化技术在生物、化学、医疗等领域的发展,自动化或半自动化操作已经呈现出逐步取代手动操作的趋势,成为高效生产必不可少的手段之一。自动化在有机化工合成领域的应用主要是指自动取样、移液、完成实验试剂稀释和实验用品的装配等操作,以上操作均应基于对实验反应的监测。
3.传统的反应监测是实验员根据自己的经验以及时间安排对反应液进行手动取样送检,随后实验员自己再根据实验结果做出判断是需要延长时间还是直接判定反应结束,整个监测过程对实验员的依赖性很大,因此人工成本较高,而且取样时间、判断依据也会存在个体差异性。目前,公开号为cn107402273a的中国发明专利公开了一种自动取样组件和三维自动取样系统,该自动取样组件可以快速、合理的压住样品瓶、实现取样,且取样针可以快速的脱离样品瓶;公开号为cn207119614u的中国实用新型专利公开了一种自动移液及清洗系统,有益效果是液体配制过程中移液、清洗、排废液及清洗液加注环节并行工作,消除或缩短了各环节相互等待的时间;然而,上述现有技术,仅仅能够实现单一的自动化功能,如自动取样或自动移液及清洗,功能较单一,无法综合实现不同温度、不同规模下,各种反应的快速取样、样品稀释、反应液移除以及岛津瓶组装等功能,且现有技术仅能够完成单一动作的实现,而没有逻辑支撑,无法实现对反应进行智能监测等功能。
4.因此,在本领域内,亟需开发一种反应智能检测系统,能够模拟实验人员对反应进程进行判断,并对机器下达指定指令,机器接收到信号后,能够及时、准确地操作,保证设备在无人参与的情况下,监测并完成实验,降低了人工成本,也使得化学合成智能化、自动化,提升工业生产效率。
技术实现要素:
5.为解决上述技术问题,本发明提供一种多功能反应智能监测系统,包括操作台、中控系统、机器人及其地轨装置、反应加热搅拌装置、取样移液稀释装置、电气控制装置和操作装置,所述中控系统、机器人及其地轨装置、反应加热搅拌装置、取样移液稀释装置、电气控制装置和操作装置均设置在操作台上,所述中控系统用于实验员进行反应登记,所述中控系统分别与所述机器人及其地轨装置和所述电气控制装置有线电信号连接,所述机器人及其地轨装置用于机器人的位置移动和动作执行,所述操作装置用于根据实验任务向电气控制装置发送指令,所述电气控制装置用于接收所述指令并控制取样移液稀释装置,所述取样移液稀释装置用于执行取样、稀释、移液、岛津瓶组装和针清洗任务,所述反应加热搅拌装置用于搅拌反应液并控制反应液的温度。
6.具体地,所述取样移液稀释装置包括x轴支撑架、x轴伺服电机、x轴伺服导轨、l型
连接块、z轴伺服电机、z轴伺服导轨、大连接板、第一小连接板、第二小连接板、岛津瓶外壳放置块、离心瓶放置块、反应瓶定位装置、甲醇槽、洗针槽、排废槽、岛津瓶组装装置、岛津瓶上样装置、反应瓶旋盖装置和反应瓶离心瓶交互装置,所述x轴伺服电和x轴伺服导轨均固定安装在x轴支撑架的顶端,所述l型连接块用于将x轴伺服导轨与z轴伺服导轨连接,所述l型连接块的中间位置设置有支撑块,所述z轴伺服电机与z轴伺服导轨固定连接,所述大连接板与所述z轴伺服导轨连接,所述岛津瓶外壳放置块用于取样时岛津瓶外壳的放置以及稀释时岛津瓶的放置,所述离心瓶放置块用于移液时离心瓶的放置,所述甲醇槽用于存放甲醇,所述洗针槽用于取样针、稀释针、移液针的清洗,所述排废槽用于针清洗后进行排废处理,所述岛津瓶上样装置用于托起岛津瓶外壳与岛津瓶内芯,所述反应瓶离心瓶交互装置,用于反应液移除完成后,反应瓶和离心瓶的放置以及干净离心瓶的放置。
7.具体地,所述大连接板上设置有取样针气缸、取样针气缸连接块、取样针固定块、取样针滑块、取样针滑轨、取样针和取样针导向块,所述取样针气缸连接块固定安装在取样针滑块上,所述取样针固定块固定安装在取样针气缸连接块的底端,所述取样针导向块固定安装在取样针滑轨的底部,所述取样针固定安装在取样针固定块与取样针导向块中,所述取样针气缸能够使取样针气缸连接块相对于取样针滑轨上下移动,所述取样针滑轨用于使得取样针上下移动。
8.具体地,所述大连接板上还设置有稀释针气缸、稀释针气缸连接块、稀释针固定块、稀释针滑块、稀释针滑轨、稀释针和稀释针导向块,所述稀释针气缸连接块固定安装在稀释针滑块上,所述稀释针固定块固定安装在稀释针气缸连接块的底端,所述稀释针导向块固定安装在稀释针滑轨的底部,所述稀释针固定安装在稀释针固定块与稀释针导向块中,所述稀释针气缸能够使稀释针气缸连接块相对于稀释针滑轨上下移动,所述稀释针滑轨用于使得稀释针上下移动。
9.具体地,所述大连接板上还设置有移液针气缸、移液针气缸连接块、移液针滑块、移液针滑轨、移液针固定块、移液针、移液针导向块和储液仓,所述移液针气缸连接块固定安装在移液针滑块上,所述移液针固定块固定安装在移液针气缸连接块的底端,所述移液针导向块固定安装在移液针滑轨的底部,所述移液针固定安装在移液针固定块与移液针导向块中,所述移液针气缸能够使移液针气缸连接块相对于移液针滑轨上下移动,所述移液针滑轨用于使得移液针上下移动,所述储液仓固定安装在移液针气缸的一侧,且所述移液针的内部通过软管与储液仓的内部连通。
10.具体地,所述大连接板上还设置有固体花洒气缸、固体花洒气缸连接块、固体花洒滑块、固体花洒滑轨、固体花洒导向块和固体花洒,所述固体花洒气缸连接块固定安装在固体花洒滑轨上,所述固体花洒气缸固定安装在固体花洒气缸连接块的顶部,所述固体花洒气缸用于带动固体花洒上下移动,所述固体花洒导向块固定安装在固体花洒气缸连接块的底部,所述固体花洒固定安装在固体花洒导向块中,所述固体花洒滑块能够使得固体花洒相对于固体花洒滑轨上下移动。
11.具体地,所述大连接板上还设置有放气针气缸、放气针气缸连接块、放气针滑块、放气针滑轨和放气针导向块,所述放气针气缸连接块固定安装在放气针滑轨上,所述放气针气缸固定安装在放气针气缸连接块的顶部,所述放气针导向块固定安装在放气针气缸连接块的底部,所述放气针固定安装在放气针导向块中,所述放气针滑块能够使得放气针相
对于放气针滑轨上下移动。
12.具体地,所述第一小连接板固定安装在取样针气缸连接块上,所述第一小连接板上固定安装有取样枪气缸,所述取样枪气缸的底部固定安装有取样枪,所述取样枪的内部通过软管与取样针的内部连通。
13.具体地,所述第二小连接板固定安装在稀释枪气缸连接块上,所述第二小连接板上固定安装有稀释枪气缸,所述稀释枪气缸的底部固定安装有稀释枪,所述稀释枪的内部通过软管与稀释针的内部连通。
14.具体地,所述反应瓶定位装置用于放置反应瓶,进行取样与移液任务,所述反应瓶定位装置包括磁力搅拌器、反应瓶定位槽,反应瓶定位器杠和无杆气缸,所述无杆气缸固定安装在操作台的顶部,所述无杆气缸的外载上设置有第一直板,所述第一直板上设置有磁力搅拌器,所述第一直板上设置有连接柱,所述连接柱远离第一直板的一端设置有第二直板,所述第二直板的中间位置开设有通孔,所述反应瓶定位槽设置在第二直板上,且所述反应瓶定位槽位于所述通孔上方,所述反应瓶定位气缸固定安装在第二直板的两侧。
15.具体地,所述反应瓶旋盖装置用于旋开和旋回反应瓶的瓶盖,所述反应瓶旋盖装置包括旋盖系统气缸、旋盖步进电机、旋盖滑环和旋盖三爪气缸,所述旋盖步进电机固定安装在操作台上,所述旋盖系统气缸固定安装在旋盖步进电机的顶端,所述旋盖滑环固定安装在旋盖步进电机的底端,所述旋盖三爪气缸固定安装在旋盖滑环的底部。
16.具体地,所述岛津瓶组装装置用于组装岛津瓶外壳与岛津瓶内芯,所述岛津瓶组装装置包括岛津瓶组装定位点、岛津瓶组装抱紧气缸和岛津瓶组装气缸,所述岛津瓶组装抱紧气缸固定安装在操作台上,所述岛津瓶组装抱紧气缸的底部设置有岛津瓶组装定位点,所述岛津瓶组装气缸固定安装在操作台上,且所述岛津瓶组装气缸与岛津瓶组装抱紧气缸之间有间隔。
17.具体地,所述反应加热搅拌装置包括加热磁力搅拌器、九孔反应盘和四孔低温槽,所述加热磁力搅拌器设置有八个,所述九孔反应盘设置有七个,所述四孔低温槽设置有一个。
18.具体地,所述中控系统还设置有信息记录模块,所述信息记录模块用于记录各时间节点下的时间及谱图信息。
19.本发明还提供一种基于多功能反应智能监测系统的监测方法,所述方法包括:
20.根据实验员登记的反应温度,中控系统为反应分配对应的反应盘位置,实验员将装有反应液的反应瓶放置在对应的反应盘位置上,根据实验员登记的反应时间,中控系统对反应进行逻辑分析与判断,并发出指令,命令机器人及其地轨装置与取样移液稀释装置动作;
21.中控系统判断反应开始后,机器人将反应瓶放至反应瓶定位装置中,反应瓶抱紧气缸抱紧反应瓶,进行取样,取样完成后,反应瓶抱紧气缸松开,中控系统指令机器人将反应瓶放回原来的位置;
22.中控系统判断反应完成后,机器人将反应瓶夹到反应瓶定位装置,再夹取离心瓶到离心瓶放置块,反应瓶旋盖装置将反应瓶瓶盖旋开,将其反应液全部移到离心瓶中,涮洗反应瓶2次,将涮洗液一并移到离心瓶,移液完成后,将反应瓶瓶盖再旋紧,机器人将离心瓶和空的反应瓶放到反应瓶离心瓶交互区;
23.中控系统判断反应液浓度偏大时,机器人将岛津瓶放置到岛津瓶外壳放置块,岛津瓶抱紧气缸抱紧岛津瓶,取样针将原有的反应液取出部分,然后加入等量的稀释液,再将样品瓶放回指定位置,重复稀释动作直到中控系统判断反应液浓度到达合适范围。
24.与现有技术相比,本发明的有益效果在于:
25.1.本发明提供的多功能反应智能检测系统,能够实现-78℃以上所有温度的反应,通过中控系统的设置,中控系统可以根据实验员的登记情况,分配反应瓶的位置,判断反应逻辑,从而控制运行程序对机器人和电气控制装置传达任务指令,根据登记的反应温度,中控系统可以自动分配合适温度的反应盘,根据登记的反应时长,中控系统能够在指定时间发送取样指令,并根据检测结果,只能判断是否需要自动下次取样,是否需要进行自动稀释,当判断反应完成后,中控系统可以发送移液指令完成移液,还可以进一步设置取样频次、稀释频次、移液频次、洗针频次以及蠕动泵运行流速与时间,在整个反应的监测过程中,无需实验员参与,系统及时、准确的进行自动判断、自动生成任务、自动进行相应动作,因此降低了化学合成对人的依赖性,反应判断逻辑是模拟经验丰富的实验员进行判断,消除了实验员自身化学水平参差不齐的差异性,提高了反应判断的准确率;
26.2.反应加热搅拌装置和取样移液稀释装置,取代了实验员的手动操作,能够自动完成反应液的取样、样品的稀释、反应液的移除、岛津瓶的组装、针的清洗等操作,结合对反应的智能监测,实现不同温度、不同规模反应的快速取样、移液、反应液移除和岛津瓶组装的功能,使化学合成过程自动化、智能化,还降低了人工成本,还提高了实验精确度和稳定性;
27.3.本发明提供的多功能反应智能监测系统占用空间小,能够有效提高空间利用率,解决了传统反应占用空间大的问题;
28.4.本发明提供的多功能反应智能监测系统能够24小时连续运转,且中控系统、机器人及其地轨装置和电气控制装置能够保证每个动作结点都有准确的时间记录,有利于提高生产效率。
附图说明
29.图1是本发明的反应加热搅拌装置的结构示意图;
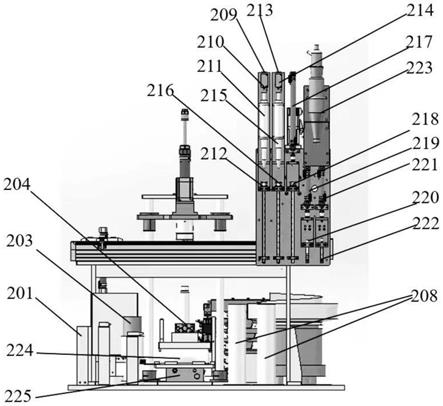
30.图2是本发明的取样移液稀释装置的结构示意图;
31.图3是本发明的取样移液稀释装置的俯视图;
32.图4是本发明的反应瓶旋盖装置的结构示意图;
33.图5是本发明的岛津瓶组装装置的结构示意图;
34.图中,101、加热磁力搅拌器;102、九孔反应盘;103、四孔低温槽;201、岛津瓶外壳放置块;202、岛津瓶抱紧气缸;203、离心瓶放置块;204、反应瓶定位装置;205、反应瓶抱紧气缸;206、甲醇槽;207、洗针槽;208、排废槽;209、取样针气缸;210、取样枪气缸;211、取样枪;212、取样针;213、稀释针气缸;214、稀释枪气缸;215、稀释枪;216、稀释针;217、移液针气缸;218、移液针;219、固体花洒气缸;220、固体花洒;221、放气针气缸;222、放气针;223、储液仓;224、磁力搅拌器;225、无杆气缸;301、旋盖系统气缸;302、旋盖步进电机;303、旋盖滑环;304、旋盖三爪气缸;401、岛津瓶组装定位点;402、岛津瓶组装抱紧气缸;403、岛津瓶组装气缸。
具体实施方式
35.下面将对本发明的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。以下实施例中所使用的材料、仪器和试剂等,如无特殊说明,均可从商业途径得到。实施例中所使用的技术手段,如无特殊说明,均为本领域技术人员所熟知的常规手段。
36.本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内,同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
37.实施例一
38.如图1所示,反应加热搅拌装置包括加热磁力搅拌器101,九孔反应盘102和四孔低温槽103,加热磁力搅拌器101,共有8台,通过定位块固定在操作台上,按照实验需求设定不同的反应温度;9孔反应盘102固定在加热磁力搅拌器101上,用于常温及以上反应的反应瓶放置;四孔低温槽103固定安装在加热磁力搅拌器101上,用于低温反应的反应瓶的放置,九孔反应盘102的每个孔位都可以搅拌良好,且每个孔位都可以达到相同的温度,四孔低温槽103的每个孔位都可以搅拌良好,每个孔位可以达到相同的温度,在-78-0℃的范围内,四孔低温槽103可以保温3-5小时。
39.如图2-5所示,取样移液稀释装置包括岛津瓶外壳放置块201,岛津瓶抱紧气缸202、离心瓶放置块203,反应瓶定位装置204,反应瓶抱紧气缸205、甲醇槽206,洗针槽207,排废槽208,取样针气缸209,取样枪气缸210,取样枪211,取样针212,稀释针气缸213,稀释枪气缸214,稀释枪215,稀释针216,移液针气缸217,移液针218,固体花洒气缸219,固体花洒220,放气针气缸221,放气针222,储液仓223,磁力搅拌器224,移载机构225,旋盖系统气缸301,旋盖步进电机302,旋盖滑环303,旋盖三爪气缸304,岛津瓶组装定位点401,岛津瓶组装抱紧气缸402和岛津瓶组装气缸403,取样枪211的量程设置为20-200μl,稀释枪的量程设置为100-1000μl,所述取样针212设置有两根,一根用于取稀释液,另一根用于取反应液,两个取样针212的量程不相同,在取样的过程中,两根针不会滴液,且完成取样后,会立即对取样针212进行清洗,保证反应液不会交叉感染。
40.本发明提供的一种基于多功能反应智能监测系统的监测方法包括:
41.根据实验员登记的反应温度,中控系统为反应分配对应的反应盘位置,实验员将装有反应液的反应瓶放置在对应的反应盘位置上,根据实验员登记的反应时间,中控系统对反应进行逻辑分析与判断,并发出指令,命令机器人及其地轨装置与取样移液稀释装置动作;
42.中控系统判断反应开始后,机器人将反应瓶放至反应瓶定位装置204中,反应瓶抱紧气缸205抱紧反应瓶,进行取样,取样完成后,反应瓶抱紧气缸205松开,中控系统指令机器人将反应瓶放回原来的位置;
43.中控系统判断反应完成后,机器人将反应瓶夹到反应瓶定位装置204,再夹取离心瓶到离心瓶放置块,反应瓶旋盖装置将反应瓶瓶盖旋开,将其反应液全部移到离心瓶中,涮洗反应瓶2次,将涮洗液一并移到离心瓶,移液完成后,将反应瓶瓶盖再旋紧,机器人将离心瓶和空的反应瓶放到反应瓶离心瓶交互区;
44.中控系统判断反应液浓度偏大时,机器人将岛津瓶放置到岛津瓶外壳放置块,岛津瓶抱紧气缸202抱紧岛津瓶,取样针212将原有的反应液取出部分,然后加入等量的稀释液,再将样品瓶放回指定位置,重复稀释动作直到中控系统判断反应液浓度到达合适范围。
45.在一个具体的实施例中,操作步骤如下:
46.(一)取反应液步骤:
47.步骤a1:到达设定的反应时间后,中控系统发出指令,命令机器人将反应瓶抓取到反应瓶定位装置204,将岛津瓶外壳抓取到岛津瓶外壳放置块201。
48.步骤a2:中控系统发出取样指令。岛津瓶抱紧气缸202将岛津瓶外壳抱紧、反应瓶抱紧气缸205将反应瓶抱紧;甲醇蠕动泵按照设定流速启动,将甲醇涌入到甲醇槽206内,到达设定时间后,甲醇蠕动泵停止。
49.步骤a3:x轴伺服移动将取样针212移动到甲醇槽206上方;z轴伺服将取样针气缸209下降,带动取样针212下降到甲醇槽206内;取样枪气缸210下降,延时上升,带动取样枪211进行甲醇吸取;z轴伺服电机上升回到原点位,取样针气缸209上升带动取样针212上升;x轴伺服移动将取样针212移动到岛津瓶外壳放置块201上方;z轴伺服下降,取样针气缸209下降带动取样针212下降到岛津瓶外壳内;取样枪气缸210下降,带动取样枪211将甲醇输入到岛津瓶内;z轴伺服上升回到原点位,取样针气缸209上升带动取样针212上升;取样枪气缸210上升;按照设定取甲醇频次,重复步骤a3。
50.步骤a4:二氯蠕动泵按照设定流速启动,将二氯涌入到洗针槽207内,到达设定时间后,二氯蠕动泵停止。x轴伺服移动将取样针212移动到洗针槽207上方;z轴伺服下降,取样针气缸209下降带动取样针212下降到洗针槽207内;取样枪气缸210下降,延时上升,带动取样枪211进行吸取二氯;z轴伺服上升回到原点位,取样针气缸209上升带动取样针212上升;x轴伺服移动将取样针212移动到排废槽208上方;z轴伺服下降,取样针气缸209下降带动取样针212下降到排废槽208内;取样枪气缸210下降,带动取样枪211将吸取的二氯输入到排废槽208内;z轴伺服上升回到原点位,取样针气缸209上升带动取样针212上升,取样枪气缸210上升;按照设定洗针频次,重复步骤a4。
51.步骤a5:x轴伺服移动将放气针222移动到反应瓶定位装置204上方;z轴伺服下降,放气针气缸221下降带动放气针222下降,在反应瓶的垫片上进行扎孔排气;z轴伺服上升回到原点位,放气针气缸221上升带动放气针222上升。
52.步骤a6:x轴伺服移动将取样针212移动到反应瓶定位装置204上方;z轴伺服下降,取样针气缸209下降带动取样针212下降到反应瓶内;取样枪气缸210下降,延时上升,带动取样枪211进行吸取反应液;z轴伺服上升回到原点位,取样针气缸209上升带动取样针212上升;x轴伺服移动,将取样针212移动到岛津瓶外壳放置块201上方;z轴伺服下降,取样针气缸209下降带动取样针212下降到岛津瓶外壳内;取样枪气缸210下降,带动取样枪211将反应液输入到岛津瓶内;z轴伺服上升回到原点位,取样针气缸209上升带动取样针212上升;取样枪气缸210上升;按照设定取反应液频次,重复步骤a6。
53.步骤a7:同步骤a4。动作完成后,x轴伺服移动将取样针212移动到原点位置。
54.步骤a8:步骤a7的同时,岛津瓶抱紧气缸202松开,反应瓶抱紧气缸205松开。允许机器人将取样完成的岛津瓶外壳抓取到岛津瓶组装定位点401;中控系统发出抱紧指令使岛津瓶外壳抱紧气缸402抱紧,将岛津瓶外壳抱紧;中控系统发出取岛津瓶内芯指令,命令机器人从岛津瓶上料装置将岛津瓶内芯抓取到岛津瓶组装定位点401;中控系统发出岛津瓶组装指令使岛津瓶组装气缸403下降进行岛津瓶的组装;延时后,岛津瓶组装抱紧气缸402松开,岛津瓶组装气缸403上升;组装完成后,中控系统发出指令命令机器人将组装完成的岛津瓶抓取到分析设备上进行分析。
55.步骤a9:中控系统发出指令,命令机器人将反应瓶从反应瓶定位装置204抓取送回到原反应盘位置。
56.(二)稀释反应液步骤:
57.步骤b1:中控系统通过分析设备判断样品过浓后,发出指令命令机器人将需要稀释的岛津瓶放置到岛津瓶外壳放置块201内。
58.步骤b2:中控系统系统发出稀释频次,洗针频次,各种泵的流速和运行时间命令及稀释开始指令。岛津瓶抱紧气缸202将需要稀释的岛津瓶抱紧,甲醇蠕动泵按照给定流速和时间启动,将甲醇涌入到甲醇槽206内,时间到达后,甲醇蠕动泵停止。
59.步骤b3:x轴伺服移动,将稀释针216移动到岛津瓶外壳放置块201上方;稀释枪气缸214下降,带动稀释枪215成按压状态;z轴伺服下降,稀释针气缸213下降带动稀释针216下降到岛津瓶内;稀释枪气缸214上升,带动稀释枪215吸取样品;z轴伺服上升回到原点位,稀释针气缸213上升带动稀释针216上升;x轴伺服移动,将稀释针216移动到排废槽208上方;z轴伺服下降,稀释针气缸213下降带动稀释针216下降到排废槽208内;稀释枪气缸214下降,延时上升,带动稀释枪215将吸取的样品输入到排废槽内;z轴伺服上升回到原点位,稀释针气缸213上升带动稀释针216上升;按照设定吸取样品频次,重复步骤b3。
60.步骤b4:二氯蠕动泵按照给定流速和时间启动,将二氯涌入到洗针槽207内,时间到达后,二氯蠕动泵停止。x轴伺服移动,将稀释针216移动到洗针槽207上方;z轴伺服下降,稀释针气缸213下降带动稀释针216下降到洗针槽207内,没入二氯;稀释枪气缸214下降,延时上升,带动稀释枪215进行吸液;z轴伺服上升回到原点位,稀释针气缸213上升带动稀释针216上升;x轴伺服移动,将稀释针216移动到排废槽208上方;z轴伺服下降,稀释针气缸213下降带动稀释针216下降到排废槽208内;稀释枪气缸214下降,带动稀释枪215将吸取的二氯输入到排废槽208内;z轴伺服上升回到原点位,稀释针气缸213上升带动稀释针216上升,稀释枪气缸214上升;按照设定洗针频次,重复步骤b4。
61.步骤b5:x轴伺服移动,将稀释针216移动到甲醇槽206上方;z轴伺服下降,稀释针气缸213下降带动稀释针216下降到甲醇槽206内,没入甲醇;稀释枪气缸214下降,延时上升,带动稀释枪215进行吸液;z轴伺服上升回到原点位,稀释针气缸213上升带动稀释针216上升;x轴伺服移动,将稀释针216移动到岛津瓶外壳放置块201上方;z轴伺服下降,稀释针气缸213下降带动稀释针216下降到岛津瓶内;稀释枪气缸214下降,带动稀释枪215将甲醇输入到岛津瓶内;z轴伺服上升回到原点位,稀释针气缸213上升带动稀释针216上升;稀释枪气缸214上升;按照设定取甲醇频次,重复步骤b5。
62.步骤b6:同步骤b4。动作完成后,x轴伺服移动,将稀释针216移动到原点位置。岛津
瓶抱紧气缸202将稀释完成的岛津瓶松开。
63.步骤b7:反应液稀释完成后,中控系统发出指令,命令机器人将稀释完成的岛津瓶取走继续进行分析测试。
64.(三)反应液移除步骤:
65.步骤c1:反应完成分析后,实验员在中控系统中确认反应完成。中控系统发出指令,命令机器人从9孔反应盘102或低温槽反应盘103上将需要反应液移除的反应瓶抓取到反应瓶定位装置204;命令机器人从离心瓶反应瓶交互区将干净的离心瓶抓取到离心瓶放置块203。
66.步骤c2:中控系统系统发出反应液移除涮洗储液仓频次,各种泵的流速和运行时间指令及反应液移除开始指令。
67.步骤c3:储液仓蠕动泵启动小流速吸液。
68.步骤c4:反应瓶定位装置204上的反应瓶抱紧气缸205将反应瓶抱紧;无杆气缸225伸出,带动反应瓶定位装置204移动到反应瓶旋盖装置下方;旋盖系统气缸301下降,带动旋盖步进电机302、旋盖滑环303、旋盖三爪气缸304下降;旋盖三爪气缸304将反应瓶瓶盖抱紧;步进电机302启动,反转方向动作,驱动旋盖滑环反转动作,从而带动旋盖三爪气缸304将反应瓶瓶盖旋开;旋盖系统气缸301上升,带动旋盖步进电机302、旋盖滑环303、旋盖三爪气缸304(已抱紧反应瓶瓶盖)上升;无杆气缸225缩回,带动反应瓶定位装置204移回。
69.步骤c5:x轴伺服移动,将移液针218移动到反应瓶定位装置204上方;储液仓蠕动泵停止小流速吸液;z轴伺服下降,移液针气缸217下降带动移液针218下降到反应瓶底部;储液仓蠕动泵按照设定流速启动吸液,将反应液吸入到储液仓223中,到达设定时间,z轴伺服上升回到原点位置;移液针气缸217上升带动移液针218上升;x轴伺服移动,将移液针218移动到离心瓶放置块203上方;z轴伺服下降,移液针气缸217下降带动移液针218下降到离心瓶瓶口处;储液仓蠕动泵按照设定流速启动吐液,将储液仓223中的反应液全部吐到离心瓶放置块203中的离心瓶,到达设置时间后,z轴伺服上升回到原点位置,移液针气缸217上升带动移液针218上升;储液仓蠕动泵停止吐液,开始小流速吸液;
70.步骤c6:x轴伺服移动,将固体花洒220移动到排废槽208上方;z轴伺服下降,固体花洒气缸219下降,带动固体花洒220下降到排废槽208内;二氯蠕动泵按照设定流速启动,将固体花洒220中的气体排到排废槽208内,到达设定时间后二氯蠕动泵停止运行;z轴伺服上升回到原点位置,固体花洒气缸219上升,带动固体花洒220上升;
71.步骤c7:x轴伺服移动,将固体花洒220移动到反应瓶定位装置204上方;z轴伺服下降,固体花洒气缸219下降,带动固体花洒220下降到反应瓶定位装置204上的反应瓶瓶口处;二氯蠕动泵按照设定流速启动,将二氯通过固体花洒220喷射在反应瓶内壁上,用于反应瓶的涮洗,到达设定时间后二氯蠕动泵停止运行;z轴伺服上升回到原点位置,固体花洒气缸219上升,带动固体花洒220上升;
72.步骤c8:x轴伺服移动,将移液针218移动到反应瓶定位装置204上方;储液仓蠕动泵停止小流速吸液;z轴伺服下降,带动移液针218下降到反应瓶瓶口处;储液仓蠕动泵按照设定流速吐液;二氯蠕动泵按照设定流速吐液,将二氯通过储液仓223进入到反应瓶,用于储液仓223内壁反应液的冲洗;到达设置时间后,二氯、储液仓蠕动泵停止吐液;z轴伺服上升到指定位置,移液针气缸217下降带动移液针218下降到反应瓶底部;储液仓蠕动泵按照
设定流速启动吸液,将反应瓶涮洗液吸入到储液仓223中,到达设定时间,z轴伺服上升回到原点位置;移液针气缸217上升带动移液针218上升;x轴伺服移动,将移液针218移动到离心瓶放置块203上方;z轴伺服下降,移液针气缸217下降带动移液针218下降到离心瓶瓶口处;储液仓蠕动泵按照设定流速启动吐液,将储液仓223中的反应液全部吐到离心瓶放置块203中的离心瓶,到达设置时间后,z轴伺服上升回到原点位置,移液针气缸217上升带动移液针218上升;储液仓蠕动泵停止吐液,开始小流速吸液;按照设定频次,重复步骤c8。
73.步骤c9:无杆气缸225伸出,带动反应瓶定位装置204移动到反应瓶旋盖装置下方;旋盖系统气缸301下降,带动旋盖步进电机302、旋盖滑环303、旋盖三爪气缸304(已抱紧反应瓶瓶盖)下降,同时步进电机302启动,正转转方向动作,驱动旋盖滑环正转动作,从而带动旋盖三爪气缸304将反应瓶瓶盖旋紧;旋盖三爪气缸304将反应瓶瓶盖松开;旋盖系统气缸301上升,带动盖步进电机302、旋盖滑环303、旋盖三爪气缸304上升;无杆气缸225缩回,带动反应瓶定位装置204移回;无杆气缸225上的反应瓶抱紧气缸205松开,将抱紧的反应瓶松开;
74.步骤c10:x轴伺服移动,将移液针218移动到洗针槽207上方;储液仓蠕动泵停止吸液;二氯蠕动泵按照设定的流速启动吐液,将二氯充满洗针槽207内部;z轴伺服下降,移液针气缸217下降,带动移液针218下降到洗针槽207内;二氯蠕动泵运行到达设定的时间后停止吐液;z轴伺服上升回到原点位置,移液针气缸217上升,带动移液针218上升;x轴伺服移动,将移液针218移动到排废槽208上方;z轴伺服下降,移液针气缸217下降,带动移液针218下降到排废槽208内;储液仓蠕动泵按照设定的流速将空气从储液仓223吹出;水蠕动泵按照设定的流速启动,通过花洒均匀的冲洗储液仓223内壁,并从移液针218排出到排废槽208内,到达设定时间后水蠕动泵停止运行;丙酮蠕动泵按照设定的流速启动,通过花洒均匀的冲洗储液仓223内壁,并从移液针218排出到排废槽208内,到达设定时间后丙酮蠕动泵停止运行;二氯蠕动泵按照设定的流速启动,通过花洒均匀的冲洗储液仓223内壁,并从移液针218排出到排废槽208内,到达设定时间后二氯蠕动泵停止运行;储液仓蠕动泵延时关闭;z轴伺服上升回到原点位置,移液针气缸217上升,带动移液针218上升;x轴伺服移动回到原点位置。
75.步骤c11:反应液移除完成后,中控系统发出指令命令机器人将反应液移除完成的反应瓶及离心瓶抓取到反应瓶离心瓶交互装置上。
76.综上,本发明提供的一种多功能反应智能监测系统,可以实现多功能反应及反应智能监测,同时基于对反应的智能监测,自动化完成反应液取样、稀释、移液、岛津瓶组装和针的清洗等多项人工操作,解决了人工成本高的问题,使得反应流程更稳定,大大提高了生产效率,此外,在反应的每一个时间节点都会有时间及谱图信息记录,从而使得实验员可以在系统中查看整个反应的具体反应历程,反应和监测过程无需实验员参与,系统能够及时、准确的进行自动判断、自动生成任务、自动进行相应动作,降低了化学合成对人的依赖性,消除了实验员自身化学水平参差不齐的差异性,提高了反应判断的准确率。综上所述,上述各实施例仅为本发明的较佳实施例而已,并不用以限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,皆应包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。