1.本发明一种基于转换矩阵的半实物仿真转台转角办法,属飞行器控制仿真领域,涉及飞 行器绕心运动模型、不同坐标系的转换矩阵、地球的自转、带转台的半实物仿真等方面。
背景技术:
2.在进行带转台的半实物仿真试验时,一般使用转序“匹配”转台,例如,仿真机中运动 模型的姿态角是用2-3-1转序定义的,其匹配转台就是立式三轴转台;同理,3-2-1转序运动 模型则对应卧式三轴转台。在实际的半实物仿真试验中,由于转台性能或者其他硬性条件的 限制,可能会使用“非匹配”转台进行半实物仿真验证,此时常规的方法是直接将模型的姿 态角发送给“非匹配”转台进行半实物仿真,考虑到目前航天领域中主流惯组的特性(敏感 三轴角速度),这种转台转角方法是较粗糙的,误差较大;因此一些文章中提出了在不考虑地 球自转以及惯组的安装误差时进行半实物仿真的转台转角方法,它们考虑了立式转台与卧式 转台驱动的差异性,但是仍然忽略了地球自转和惯组在转台上的安装误差;因此本人在《一 种基于解算微分方程的带转台半实物仿真验证技术》中提出了一种考虑转台“非匹配”性、 地球自转、惯组在转台上的安装误差等因素时的半实物仿真转台转角办法,它于理论上是无 差的,对转台初始转角要求很低,能很好适应转台的转角范围,但是该方法仍然相对较复杂, 且对于初学者而言较容易出错。
技术实现要素:
3.本文结合半实物仿真时转台的“非匹配”性、地球自转特性、惯组安装在转台上时的安 装误差特性等因素提出了一种基于转换矩阵的半实物仿真转台转角办法。该方法的核心是坐 标系转换矩阵的唯一性。
4.本发明的技术解决方案是:(1)一种基于转换矩阵的半实物仿真转台转角办法,在综合考虑转台类型的非匹配性、 地球自转特性、惯组在转台上的安装角偏差以及惯组的工作特性等因素时通过转换矩阵的唯 一性来解算转台的转角,它通过减小惯组测量值(角速度)的理论误差来达成本发明的目的 ——提高半实物仿真的精度,减小半实物仿真对转台类型的依赖度。(2)根据前述的一种基于转换矩阵的半实物仿真转台转角办法,通过求解转换矩阵以及 解算反三角函数等方式来求解转台转角。(3)根据前述的一种基于转换矩阵的半实物仿真转台转角办法,先按照本发明解算转台 初始转角,转台转角就位后再开始半实物仿真。(4)根据前述的一种基于转换矩阵的半实物仿真转台转角办法,在考虑惯组在转台上的 安装角偏差、地球自转、转台的非匹配性等一项或几项因素时应用本发明具体实施步骤(5)、 (6)来求解转台转角。(5)根据前述的一种基于转换矩阵的半实物仿真转台转角办法,使用本发明说明
书附图 中的图1进行数学仿真说明。(6)根据前述的一种基于转换矩阵的半实物仿真转台转角办法,使用本发明说明书附图 中的图2~图8中任意一张或多张图片来说明其转台转角办法的优势。
5.本发明的优点在于:
6.(1)本发明从理论上来讲是精确的,即在不考虑计算机的解算误差、电子元器件误差、 惯组测量误差、转台机械误差等硬性误差时,本发明的转角办法是无差的;
7.(2)本发明提出的转角办法不依赖于仿真机中的运动模型,不仅适用于“非匹配”转台, 在使用“匹配”转台且考虑地球自转、惯组的安装误差等因素时,本发明同样适用;
8.(3)本发明除了转台特性还综合考虑了地球自转、惯组的安装偏差等因素时,通过修正 转台转角仍能使惯组敏感的理论角速度与模型解算一致,提高了仿真精度;而对于不需要考 虑地球自转和惯组安装偏差的半实物仿真仍可以应用本发明,只需要将对应矩阵置为单位阵 即可。
9.(4)本发明的技术实现相对解微分方程而言更简单、快捷,操作更方便且不易出错。
附图说明
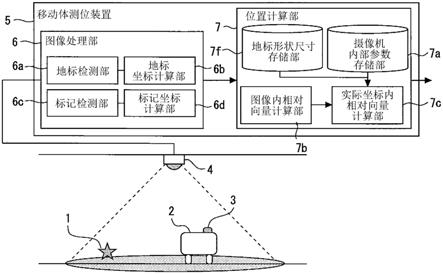
10.图1:对本发明所提转台转角办法的数学仿真验证流程图
11.图中
12.矩形框中所提内容——均来自具体实施方式;
13.黑色箭头——箭头指向表征数据流关系,箭头尾部是数据发出端,箭头指向数据接收端。
14.图2、图3、图4:转台三个转角对比
15.图中
16.蓝线(带叉型标记)为应用本发明所提转台转角办法解算的转台转角,红线(带矩形标 记)为运动模型解算的姿态角,粉线(带圆形标记)为对照试验解算的转台转角。
17.可以看出,本发明与对照试验的转台转角存在明显差异,转台的初始值亦不相同。这是 因为对照试验的转台转角依赖于给定的初始转台转角,可人为改变初始值;而本发明的转台 转角是由仿真机解算得到的,初始值是固定的。
18.图5、图6、图7:惯组测得的理想角速度对比(
19.图中
20.红线(带矩形标记)为理论三轴角速度,蓝线(带叉型标记)为应用本发明所提转台转 角办法后惯组敏感到的三轴角速度,粉线(带圆形标记)为对照试验中惯组敏感到的三轴角 速度。
21.可以看出,无论滚转角速度、偏航角速度或者俯仰角速度,本发明、对照试验与理论值 都近乎是重合的。
22.图8:图7绿色椭圆框中内容的放大
23.图中
24.可以看出,本发明以及对照试验所对应的俯仰角速度与理论值很贴近,几乎是无差的(误 差为0.0015
°
/s)。
具体实施方式
25.一种基于转换矩阵的半实物仿真转台转角办法,其具体的实施方式如下:
26.(1)仿真机解算对应转序下弹体绕心的运动模型,获取模型此时姿态角:
[0027][0028]
3-2-1转序时,
[0029][0030]
2-3-1转序时,
[0031][0032]
其中m
x
、my、mz是弹体所受的合外力矩在本体系下的三个分量;j
x
、jy、jz是弹 体绕三个惯性主轴的转动惯量;ω
x
、ωy、ωz是弹体系相对惯性系的转动角速度在弹 体系下的投影,这三个值与惯性系的选取无关,是弹体、箭体旋转时固有的属性;θ、 ψ、γ分别是由对应转序决定的俯仰角、偏航角、滚转角。
[0033]
(2)求解此时发惯系到本体系的转换矩阵:
[0034]
(运动模型使用3-2-1转序)
[0035]
或
[0036]
(运动模型使用2-3-1转序)
[0037]rx
、ry、rz是基元旋转矩阵,其形式是业内人员公知,在此不再赘述;另外不管转 序如何,转换矩阵是唯一的,即:
[0038][0039]
(3)根据转台所在地的纬度、转台发射系的射向以及地球自转角速度等求出转台发惯系到 转台发射系的转换矩阵:
[0040][0041]
则
[0042][0043]
其中,a
zt
是转台发射系的射向,由转台零位时内轴的指向与北向的夹角确定,顺时 针为正;b
zt
是转台所在地的地理纬度;ωe是地球自转角速度的标量值;t是t0转导 航后经过的时间。
[0044]
(4)测量惯组在转台上的安装误差,不妨假设以3-2-1转序定义误差角,且假设误差角已 经测得了,分别为δθ、δψ、δγ,则由惯组的“理论本体系”(理论本体系三轴与 转
台三轴一一对应且平行)到惯组的实际本体系的转换矩阵如下:
[0045][0046]
则
[0047][0048]
在将惯组安装在转台上后,安装误差的转换矩阵是唯一的,不会因为转序而不同,换 言之,即便是用2-3-1转序测得的误差角,转换矩阵仍然是
[0049]
(5)结合(2)、(3)、(4)求解转台发射系到惯组“理论本体系”的转换矩阵,如下:
[0050][0051]
其中,c
ij
是矩阵的元素。
[0052]
(6)确定转台类型,求解转台转角。如转台是立式三轴转台,则有:
[0053]
θ
zt
=arcsin(c
12
),θ
zt
∈[-π/2,π/2]
[0054]
ψ
zt
=arctan 2(-c
13
,c
11
),ψ
zt
∈[-π,π]
[0055]
γ
zt
=arctan 2(-c
32
,c
22
),γ
zt
∈[-π,π]
[0056]
若转台是卧式三轴转台,则有:
[0057]
θ
zt
=arctan 2(c
12
,c
11
),θ
zt
∈[-π,π]
[0058]
ψ
zt
=arcsin(-c
13
),ψ
zt
∈[-π/2,π/2]
[0059]
γ
zt
=arctan 2(c
23
,c
33
),γ
zt
∈[-π,π]
[0060]
以上6步是实现本发明所提转台转角办法的具体步骤。另外在应用本发明进行半实物仿 真时,要先进行预解算,即走一次本发明的6个步骤,求出转台的初始转角,再转台转到位 后再进行后续的半实物仿真试验。
[0061]
为充分说明本发明所提转角办法的优点,本文设置了两组对照试验,由于硬件条件的限 制,本文采取数学仿真的形式来验证,数学仿真的验证形式见说明书附图。另外对照方案为 《一种基于解算微分方程的带转台半实物仿真验证技术》中提到的验证方案,其优越性已在 该发明中得到了证明。
[0062]
进行数学仿真验证和对照试验的初始条件如下:
[0063]
纬度:39
°
56
′
;
[0064]
射向:90
°
;
[0065]
射角:30
°
;
[0066]
安装角偏差(按照3-2-1转序定义):俯仰、偏航各0.5
°
,滚转2
°
;
[0067]
运动模型:按照3-2-1转序定义姿态角;
[0068]
转台类型:立式三轴转台。
[0069]
另外,本发明中未详细说明的部分属本领域技术人员公知常识。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。