1.本发明的各种方面和实施方式涉及输送装置和输送方法。
背景技术:
2.例如,在下述专利文献1中公开了如下技术:在基片通过投射光的投光部与接收从投光部投射的光的受光部之间而遮断了从投光部投射的光的情况下,判断为基片通过了投光部与受光部之间。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2020-96149号公报。
技术实现要素:
6.发明要解决的问题
7.本发明提供一种能够利用与现有技术不同的方法来判断基片等部件是否通过了预定的区域的输送装置和输送方法。
8.用于解决问题的技术手段
9.本发明的一个方面是一种输送装置,包括输送臂、照射部、受光部和控制装置。输送臂输送部件。照射部在输送臂输送部件时向部件所要通过的通过区域倾斜地照射光。受光部在部件从通过区域通过时,接收从照射部照射并被部件反射的光。控制装置根据受光部是否接收到从照射部照射的光,来判断部件是否通过了通过区域。
10.发明效果
11.根据本发明的各个方面和实施方式,能够通过与现有技术不同的方法来判断基片等部件是否通过了预定的区域。
附图说明
12.图1是表示第1实施方式中的处理系统的一例的俯视图。
13.图2是第1实施方式中的闸阀附近的放大图。
14.图3是表示在第1实施方式中向基片照射的光的光路的一例的图。
15.图4是第1实施方式中的闸阀附近的放大图。
16.图5是第2实施方式中的闸阀附近的放大图。
17.图6是表示在第2实施方式中向基片照射的光的光路的一例的图。
18.图7是用于说明基片的基准位置的确定方法的一例的图。
19.图8是表示第2实施方式中的输送方法的一例的流程图。
20.图9是表示第3实施方式中的负载锁定组件的一例的侧视图。
21.图10是表示在第3实施方式中向基片照射的光的光路的一例的图。
22.图11是表示在第3实施方式中向基片照射的光的光路的另一例的图。
23.图12是表示在第3实施方式中向基片照射的光的光路的另一例的图。
24.图13是表示在第4实施方式中向基片照射的光的光路的一例的图。
25.图14是表示在第4实施方式中向基片照射的光的光路的另一例的图。
26.图15是表示在第4实施方式中向基片照射的光的光路的另一例的图。
27.图16是表示在第4实施方式中向基片照射的光的光路的另一例的图。
28.附图标记说明
29.a 通过区域
30.e 端点
31.er 边缘环
32.g 闸阀
33.l 直线
34.o 基准位置
35.p 反射位置
36.t 线段
37.w 基片
38.1 处理系统
39.10 主体
40.100 控制装置
41.11 真空输送组件
42.110 输送臂
43.111 导轨
44.12 处理组件
45.13 负载锁定组件
46.14 大气输送组件
47.140 输送臂
48.141 导轨
49.15 装载端口
50.20 照射部
51.21 受光部
52.22 反射镜
具体实施方式
53.以下,基于附图对输送装置和输送方法的实施方式进行详细说明。此外,并不由以下的实施方式限定本发明的输送装置和输送方法。另外,以下例示的各实施方式能够在不使处理内容矛盾的范围内适当组合。
54.(第1实施方式)
55.[处理系统1的结构]
[0056]
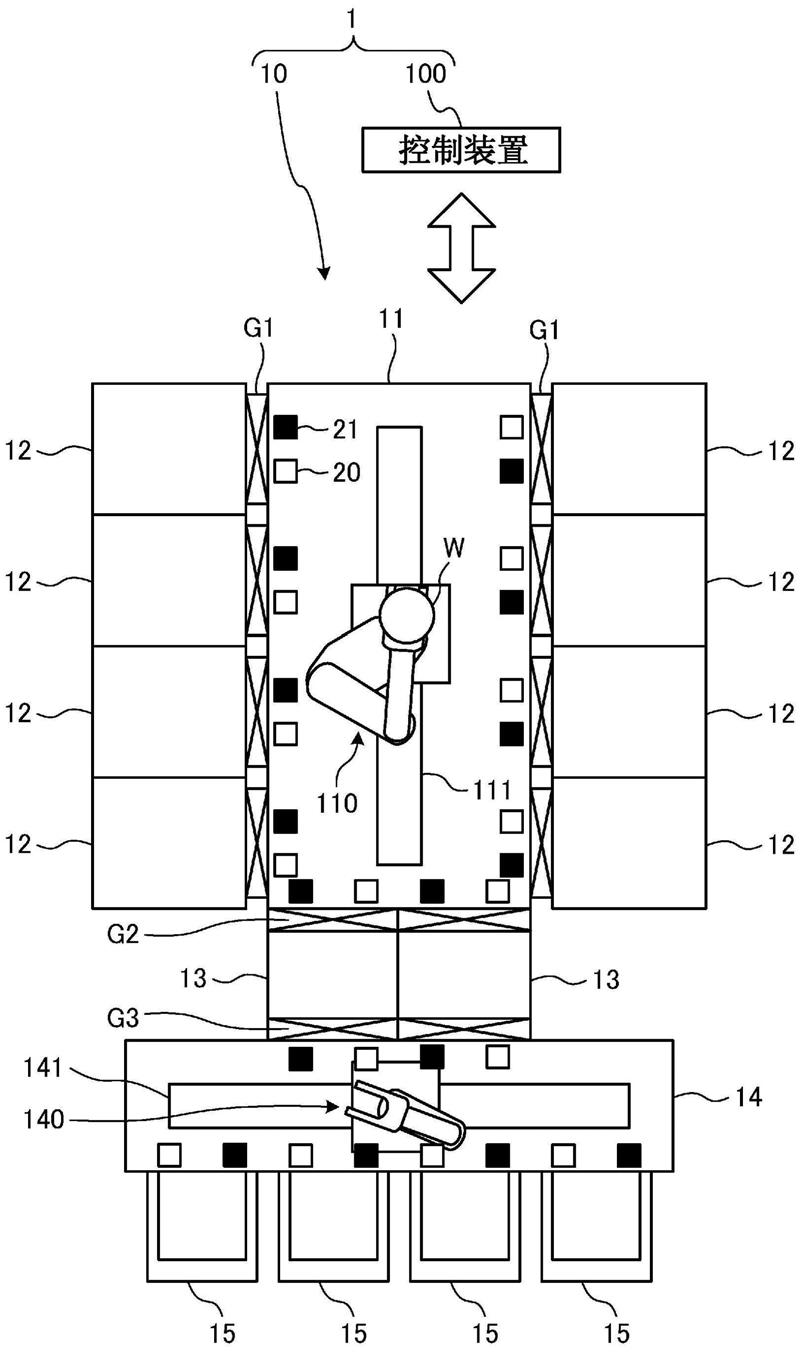
图1是表示第1实施方式的处理系统1的结构的一例的俯视图。在图1中,为了方便,以透过一部分装置的内部的构成要素的方式进行图示。处理系统1包括主体10和控制主体
10的控制装置100。处理系统1是输送装置的一例。
[0057]
主体10包括真空输送组件11、多个处理组件12、多个负载锁定组件13和大气输送组件14。在处理系统1的侧壁经由闸阀g1连接有多个处理组件12。其中,在图1的例子中,在真空输送组件11上连接有8个处理组件12,但与真空输送组件11连接的处理组件12的数量可以是7个以下,也可以是9个以上。
[0058]
各个处理组件12通过对成为处理对象的基片w实施蚀刻、成膜等处理,在基片w上形成元件。在处理组件12内设置有边缘环er等消耗部件,消耗部件在执行了对多个基片w的处理之后,更换为新的消耗部件。基片w和消耗部件是部件的一个例子。
[0059]
在真空输送组件11的另一侧壁经由闸阀g2连接有多个负载锁定组件13。在图1的例子中,在真空输送组件11上连接有2个负载锁定组件13,但与真空输送组件11连接的负载锁定组件13的数量可以是1个,也可以是3个以上。此外,2个负载锁定组件13中的至少任一个能够收纳基片w和边缘环er等消耗部件。以下,将基片w和边缘环er等消耗部件记载为基片w等。
[0060]
在真空输送组件11内配置有输送臂110。输送臂110沿着设置在真空输送组件11内的导轨111在真空输送组件11内移动。然后,输送臂110在处理组件12与其他处理组件12之间、和处理组件12与负载锁定组件13之间输送基片w。真空输送组件11内被保持为比大气压低的压力气氛。其中,输送臂110也可以是固定于真空输送组件11内的预定位置而不在真空输送组件11内移动的结构。
[0061]
在各个负载锁定组件13的一个侧壁上经由闸阀g2连接真空输送组件11,在另一个侧壁上经由闸阀g3连接大气输送组件14。在经由闸阀g3从大气输送组件14将基片w送入到负载锁定组件13内的情况下,关闭闸阀g3,负载锁定组件13内的压力从大气压下降至预定的压力。然后,打开闸阀g2,利用输送臂110将负载锁定组件13内的基片w向真空输送组件11内送出。
[0062]
另外,在负载锁定组件13内成为比大气压低的压力的状态下,利用输送臂110经由闸阀g2从真空输送组件11向负载锁定组件13内送入基片w,关闭闸阀g2。然后,负载锁定组件13内的压力上升至大气压。然后,打开闸阀g3,将负载锁定组件13内的基片w向大气输送组件14内送出。边缘环er等消耗部件的送入和送出也是同样的。
[0063]
在与设置有闸阀g3的大气输送组件14的侧壁相反侧的大气输送组件14的侧壁设置有多个装载端口15。在各个装载端口15连接有能够收纳多个基片w的foup(front opening unified pod:前开式晶圆传送盒)等容器。另外,也可以在大气输送组件14中设置变更基片w的朝向的对准组件等。另外,在多个装载端口15中的任一个连接有能够收纳边缘环er等消耗部件的容器。
[0064]
大气输送组件14内的压力为大气压。在大气输送组件14内设置有输送臂140。输送臂140沿着设置于大气输送组件14内的导轨141在大气输送组件14内移动,在负载锁定组件13与连接于装载端口15的容器之间输送基片w等。其中,输送臂140也可以是固定于大气输送组件14内的预定位置而不在大气输送组件14内移动的结构。在大气输送组件14的上部设置有ffu(fan filter unit:风机过滤单元)等,除去了微粒等的空气从上部被供给到大气输送组件14内,在大气输送组件14内形成下降流。此外,在本实施方式中,大气输送组件14内为大气压气氛,但作为其他方式,大气输送组件14内的压力也可以被控制为正压。由此,
能够抑制微粒等从外部侵入大气输送组件14内。
[0065]
另外,在真空输送组件11内和大气输送组件14内设置有多个照射部20和受光部21的组。在本实施方式中,照射部20和受光部21的组设置于各个闸阀g1附近、各个闸阀g2附近、各个闸阀g3附近和各个装载端口15附近。
[0066]
照射部20在输送臂110输送基片w等时,对基片w所要通过的通过区域倾斜地照射光。受光部21在基片w等从通过区域通过时,接收从照射部20照射并被基片w等反射的光。
[0067]
控制装置100具有存储器、处理器和输入输出接口。在存储器内保存方案等的数据、程序等。存储器例如是ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、hdd(hard disk drive:硬盘驱动器)或ssd(solid state drive:固态驱动器)等。处理器通过执行从存储器读出的程序,基于保存在存储器内的方案等数据,经由输入输出接口来控制主体10的各部。处理器是cpu(central processing unit:中央处理器)或dsp(digital signal processor:数字信号处理器)等。
[0068]
控制装置100使各个照射部20照射光,判断各个受光部21是否接收到从照射部20照射的光。然后,控制装置100根据受光部21是否接收到从照射部20照射的光,来判断基片w等是否通过了照射部20照射了光的通过区域。例如,控制装置100控制照射部20以向预定的通过区域照射光,并控制输送臂110和输送臂140,以基于方案等的数据使基片w等移动。
[0069]
然后,控制装置100在受光部21接收到从通过了通过区域的基片w等反射的光的情况下,判断为基片w等通过了通过区域,执行下一步骤的控制。此外,在受光部21没有接收到光的情况下,控制装置100判断为基片w等没有从通过区域通过,不执行下一步骤的控制,向处理系统1的用户等通知错误。
[0070]
[基片w的通过判断方法]
[0071]
图2是第1实施方式中的闸阀g1附近的放大图。图3是表示在第1实施方式中向基片w照射的光的光路的一例的图。在本实施方式中,照射部20对要送入到处理组件12内的基片w和要从处理组件12内送出的基片w所要通过的通过区域a倾斜地照射光。通过区域a是包含由输送臂110输送时的基片w等的上表面的平面。在本实施方式中,照射部20例如是照射激光的半导体激光装置。
[0072]
在基片w从通过区域a内通过的情况下,从照射部20向通过区域a照射的光例如图3所示,在基片w上的反射位置p被反射,并向受光部21入射。另一方面,在基片w没有从通过区域a内通过的情况下,从照射部20照射到通过区域a的光不被基片w反射,不向受光部21入射。受光部21将与入射的光的强度相应的电信号向控制装置100输出。受光部21例如是光电晶体管。
[0073]
在本实施方式中,照射部20和受光部21例如图3所示,相对于从通过区域a通过的基片w,配置在基片w的同一面侧。由此,能够容易地进行照射部20和受光部21的维护。
[0074]
控制装置100在受光部21接收到从照射部20照射的光的情况下,判断为基片w通过了通过区域a,在受光部21没有接收到从照射部20照射的光的情况下,判断为基片w没有从通过区域a通过。由此,控制装置100能够一边确认基片w的位置,一边对基片w实施基于方案的处理。
[0075]
此外,在边缘环er等消耗部件中,例如图4所示,在消耗部件从通过区域a内通过的情况下,从照射部20照射到通过区域a的光在消耗部件上的反射位置p’被反射,并向受光部
21入射。由此,控制装置100在受光部21接收到从照射部20照射的光的情况下,能够判断为消耗部件通过了通过区域a。另外,控制装置100在受光部21没有接收到从照射部20照射的光的情况下,能够判断为消耗部件没有从通过区域a通过。
[0076]
以上,对第1实施方式进行了说明。如上所述,本实施方式中的处理系统1包括输送臂110、照射部20、受光部21和控制装置100。输送臂110输送基片w等。照射部20在输送臂110输送基片w等时,向基片w等所要通过的通过区域a倾斜地照射光。受光部21在基片w等从通过区域a通过时,接收从照射部20照射并被基片w等反射的光。控制装置100根据受光部21是否接收到从照射部20照射的光,来判断基片w等是否通过了通过区域a。由此,能够利用与现有技术不同的方法来判断基片w等是否通过了预定的区域。
[0077]
另外,在上述的第1实施方式中,照射部20和受光部21均相对于从通过区域a通过时的基片w配置在基片w的同一面侧。由此,能够容易地进行照射部20和受光部21的维护。
[0078]
(第2实施方式)
[0079]
在第1实施方式中,通过判断受光部21是否接收到从照射部20向通过区域a照射的光,来判断基片w等是否通过了通过区域a。而在本实施方式中,还基于受光部21的受光时间来确定基片w等的基准位置。然后,将基片w等以所确定的基准位置被配置于输送目的地(例如处理组件12的腔室内等)的基准位置的方式输送到输送目的地。由此,不需要另外设置用于确定基片w等的位置的传感器,能够抑制处理系统1整体的大型化。
[0080]
图5是第2实施方式中的闸阀g1附近的放大图。图6是表示在第2实施方式中向基片w照射的光的光路的一例的图。在本实施方式中,照射部20具有照射部20a和照射部20b,受光部21具有受光部21a和受光部21b。照射部20a是第1照射部的一例,照射部20b是第2照射部的一例。另外,受光部21a是第1受光部的一例,受光部21b是第2受光部的一例。照射部20a、照射部20b、受光部21a和受光部21b设置在各自的闸阀g1附近。另外,在各个闸阀g2和闸阀g3附近也可以设置照射部20a、照射部20b、受光部21a和受光部21b。
[0081]
在本实施方式中,照射部20a和照射部20b相对于通过区域a倾斜地照射光。在基片w从通过区域a内通过的情况下,从照射部20a照射到通过区域a的光例如图6所示,在基片w上的反射位置pa被反射,并向受光部21a入射。另外,在基片w从通过区域a内通过的情况下,从照射部20b照射到通过区域a的光在基片w上的反射位置pb被反射,并向受光部21b入射。控制装置100通过判断受光部21a是否接收到从照射部20a照射向通过区域a的光、或者受光部21b是否接收到从照射部20b照射向通过区域a的光,来判断基片w是否通过了通过区域a。
[0082]
另外,控制装置100基于输送臂110的控制量来确定基片w从通过区域a通过时的基片w的移动量。另外,控制装置100确定基片w从通过区域a通过时的受光部21a和受光部21b各自的受光时间。然后,控制装置100基于确定出的基片w的移动量和受光部21a和受光部21b各自的受光时间,来确定基片w的基准位置o(例如基片w的重心)。
[0083]
例如,如图7所示,控制装置100确定表示反射位置pa的轨迹的线段ta和表示反射位置pb的轨迹的线段tb。然后,控制装置100确定作为线段ta的垂直二等分线的直线la。另外,控制装置100确定作为将线段ta的端点ea与线段tb的端点eb连接的线段的垂直二等分线的直线lb。然后,控制装置100将直线la与直线lb的交点确定为基片w的基准位置o。
[0084]
然后,控制装置100控制输送臂110,将基片w以所确定的基片w的基准位置o被配置到处理组件12的腔室内的预定位置(例如载置基片w的载置台的重心)的方式送入到处理组
件12内。由此,能够将基片w送入到处理组件12内的预定位置,能够抑制基片w间的处理的偏差。
[0085]
[输送方法]
[0086]
图8是表示第2实施方式中的输送方法的一例的流程图。图8所例示的处理通过控制装置100控制主体10的各部来实现。此外,在图8中,例示了将基片w送入到处理组件12时的处理。
[0087]
首先,控制装置100控制照射部20a和照射部20b以对闸阀g1附近的通过区域a倾斜地照射光,并打开闸阀g1。然后,控制装置100控制输送臂110,以开始向处理组件12送入基片w(s10)。然后,受光部21a和受光部21b接收由从通过区域a通过的基片w反射的光。控制装置100在受光部21a接收到来自照射部20a的光的情况、或者受光部21b接收到来自照射部20b的光的情况下,判断为基片w通过了通过区域a。
[0088]
接着,控制装置100基于输送臂110的控制量和从受光部21a和受光部21b输出的电信号,来确定基片w的移动量和受光部21a和受光部21b的受光时间(s11)。
[0089]
接着,控制装置100基于确定出的基片w的移动量和受光部21a和受光部21b的受光时间,通过图7中说明的流程,来确定基片w的基准位置o(s12)。
[0090]
接着,控制装置100控制输送臂110,将基片w以所确定的基准位置o被配置到处理组件12的腔室内的基准位置的方式送入腔室内(s13)。然后,输送臂110从腔室内退避,闸阀g1关闭,本流程图所示的处理结束。
[0091]
以上,对第2实施方式进行了说明。如上所述,在本实施方式中,照射部20具有照射部20a和照射部20b。照射部20a在从设置有输送臂110的真空输送组件11向与真空输送组件11连接的处理组件12的腔室内送入基片w时,向基片w所要通过的通过区域a内的一部分区域照射光。照射部20b在从真空输送组件11向处理组件12的腔室内送入基片w时,向基片w所要通过的通过区域a内的另一部分区域照射光。受光部21具有受光部21a和受光部21b。受光部21a接收从照射部20a照射并由从通过区域a内的一部分区域通过的基片w反射的光。受光部21b接收从照射部20b照射并由从通过区域a内的另一部分区域通过的基片w反射的光。控制装置100一边控制输送臂110以使基片w从通过区域a内通过,一边基于基片w的移动量、受光部21a的受光时间和受光部21b的受光时间来确定基片w的基准位置。然后,控制装置100控制输送臂110,将基片w以所确定的基准位置被配置到处理组件12的腔室内的预定位置的方式送入到处理组件12的腔室内。由此,能够抑制基片w间的处理的偏差。
[0092]
(第3实施方式)
[0093]
在现有技术那样的基于遮光传感器的判断方法中,通过光路被基片w等遮断的情况,判断为基片w等通过了形成有光路的区域。但是,在该方法中,在将基片w等送入到上下排列配置的装置中的任一装置的情况下,难以区别判断基片w被送入到哪个装置内。与此相对,在本实施方式中,能够区分判断在上下排列配置的哪个装置内送入了基片w等。在基片w的送出中也能够同样地区别判断。由此,能够更高精度地判断基片w等部件是否通过了预定的区域。
[0094]
在本实施方式中,例如图9所示,负载锁定组件13-1和负载锁定组件13-2上下相邻地配置。图9是表示第3实施方式中的负载锁定组件13-1和13-2的一例的侧视图。通过将负载锁定组件13-1和负载锁定组件13-2上下相邻地配置,能够削减处理系统1的占用空间。另
外,上下相邻配置的负载锁定组件13的数量也可以是3个以上。另外,上下排列配置的装置可以是2个处理组件12,也可以是处理组件12和负载锁定组件13。在图9的例子中,负载锁定组件13-1是第1腔室的一例,负载锁定组件13-2是第2腔室的一例。
[0095]
图10是表示在第3实施方式中向基片w照射的光的光路的一例的图。在本实施方式中,照射部20具有照射部20a和照射部20b,受光部21具有受光部21a和受光部21b。照射部20a、照射部20b、受光部21a和受光部21b设置在各自的闸阀g1附近。另外,在各个闸阀g2和闸阀g3附近也可以设置照射部20a、照射部20b、受光部21a和受光部21b。
[0096]
在本实施方式中,照射部20a对负载锁定组件13-1附近的通过区域a倾斜地照射光,照射部20b对负载锁定组件13-2附近的通过区域a倾斜地照射光。从照射部20a照射到通过区域a的光例如图10的实线箭头所示,在基片w被送入到负载锁定组件13-1内时,在从通过区域a通过的基片w上的反射位置pa被反射,并向受光部21a入射。在被送入到负载锁定组件13-1内时供基片w通过的通过区域a是第1通过区域的一例。
[0097]
另一方面,在基片w被送入到负载锁定组件13-2内时,从照射部20a照射到通过区域a的光例如图10的虚线箭头所示,在从通过区域a通过的基片w上反射,但不入射到受光部21a。由此,控制装置100通过检测出受光部21a接收到光的情况,能够判断为基片w通过了通过区域a。在被送入到负载锁定组件13-2内时供基片w通过的通过区域a是第2通过区域的一例。此外,控制装置100在从负载锁定组件13-1内送出基片w时,也能够以同样的方法判断基片w是否通过了通过区域a。
[0098]
另外,从照射部20b向通过区域a照射的光例如图10的实线箭头所示,在基片w被送入到负载锁定组件13-2内时,在从通过区域a通过的基片w上的反射位置pb被反射,并向受光部21b入射。另一方面,在基片w被送入到负载锁定组件13-1内时,从照射部20b照射到通过区域a的光例如图10的虚线箭头所示,在从通过区域a通过的基片w上被反射,但不入射到受光部21b。由此,控制装置100通过检测出受光部21b接收到光的情况,能够判断为基片w通过了通过区域a。此外,控制装置100在从负载锁定组件13-2内送出基片w时,也能够以同样的方法判断基片w是否通过了通过区域a。
[0099]
此外,作为其他例子,控制装置100也可以通过判断受光部21a和受光部21b中的哪一个接收到从1个照射部20照射的光,来判断基片w被送入到负载锁定组件13-1和13-2中的哪一个。图11是表示在第3实施方式中向基片w照射的光的光路的另一例的图。在图11的例子中,受光部21a是第3受光部的一例,受光部21b是第4受光部的一例。
[0100]
在基片w被送入到负载锁定组件13-1内时,从照射部20照射到负载锁定组件13-1附近的通过区域a的光例如图11所示,在基片w上的反射位置pa被反射,并向受光部21a入射。在该情况下,在基片w上被反射的光不入射到受光部21b。由此,控制装置100通过检测出受光部21a接收到光的情况,能够判断为通过了负载锁定组件13-1附近的通过区域a。此外,控制装置100在从负载锁定组件13-1内送出基片w时,也能够以同样的方法判断基片w是否通过了负载锁定组件13-1附近的通过区域a。
[0101]
另一方面,在基片w被送入到负载锁定组件13-2内时,从照射部20照射到负载锁定组件13-2附近的通过区域a的光例如图11所示,在基片w上的反射位置pb被反射,并向受光部21b入射。在该情况下,在基片w上被反射的光不入射到受光部21a。由此,控制装置100通过检测受光部21b接收到光的情况,能够判断为通过了负载锁定组件13-2附近的通过区域
a。此外,控制装置100在从负载锁定组件13-2内送出基片w时,也能够以同样的方法判断基片w是否通过了负载锁定组件13-2附近的通过区域a。在这样的结构中,也能够区别地判断基片w等被送入到上下排列配置的哪个负载锁定组件13内。另外,在图11所例示的结构中,能够削减照射部20的数量。
[0102]
另外,作为其他例子,控制装置100也可以通过检测1个受光部21接收到从照射部20a和照射部20b中的哪一个照射的光,来判断基片w被送入到负载锁定组件13-1和13-2中的哪一个。图12是表示在第3实施方式中向基片w照射的光的光路的另一例的图。
[0103]
在基片w被送入到负载锁定组件13-1内时,从照射部20a照射到负载锁定组件13-1附近的通过区域a的光例如图12的实线箭头所示,在基片w上的反射位置pa被反射,并向受光部21入射。另一方面,从照射部20b照射到负载锁定组件13-1附近的通过区域a的光例如图12的虚线箭头所示,在基片w上被反射,但不入射到受光部21。
[0104]
另一方面,在基片w被送入到负载锁定组件13-2内时,从照射部20b照射到负载锁定组件13-2附近的通过区域a的光例如图12的实线箭头所示,在基片w上的反射位置pb被反射,并向受光部21入射。另一方面,从照射部20a照射到负载锁定组件13-2附近的通过区域a的光例如图12的虚线箭头所示,在基片w上被反射,但不入射到受光部21。
[0105]
控制装置100在不同的时刻控制照射部20a的光的照射和照射部20b的光的照射,判断受光部21在哪个时刻接收到光。由此,控制装置100能够判断接收到从照射部20a和照射部20b中的哪一个照射的光。在这样的结构中,也能够区别地判断基片w等被送入到上下排列配置的哪个负载锁定组件13内。另外,在图12所例示的结构中,能够削减受光部21的数量。
[0106]
(第4实施方式)
[0107]
在2个装置在横向上相邻配置的情况下,在现有技术那样的基于遮光传感器的判断方法中,按每个通过区域a设置用于判断基片w等是否被送入到装置内的照射部20和受光部21的组。而在本实施方式中,设置1个照射部20,并按每个通过区域a设置用于判断基片w等是否被送入到装置内的受光部21。由此,能够削减照射部20的数量。
[0108]
图13是表示在第4实施方式中向基片w照射的光的光路的一例的图。在本实施方式中,处理组件12-1和处理组件12-2横向排列配置。另外,在本实施方式中,设置有对从照射部20照射的光进行反射的反射镜22。受光部21具有受光部21a和受光部21b。照射部20、受光部21a、受光部21b和反射镜22设置在闸阀g1附近。另外,在各个闸阀g2和闸阀g3附近也可以设置照射部20、受光部21a、受光部21b和反射镜22。另外,横向排列配置的装置可以是2个负载锁定组件13,也可以是处理组件12和负载锁定组件13。
[0109]
在基片w被送入到处理组件12-1内时,从照射部20照射到处理组件12-1附近的通过区域a的光例如图13所示,在基片w上的反射位置p被反射,并向受光部21a入射。在该情况下,从照射部20照射的光不向反射镜22和受光部21b入射。控制装置100在受光部21a接收到光而受光部21b没有接收到光的情况下,能够判断为基片w通过了处理组件12-1附近的通过区域a。此外,控制装置100在从处理组件12-1内送出基片w时,也能够以同样的方法判断基片w是否通过了处理组件12-1附近的通过区域a。
[0110]
另一方面,在基片w被送入到处理组件12-2内时,从照射部20照射到处理组件12-1附近的通过区域a的光例如图13所示那样入射到反射镜22。因此,从照射部20照射到处理组
件12-1附近的通过区域a的光不会入射到受光部21a。另外,入射到反射镜22的光被反射镜22反射,但被通过处理组件12-2附近的通过区域a的基片w遮断,不向受光部21b入射。控制装置100在受光部21a和受光部21b均没有接收到光的情况下,能够判断为基片w通过了处理组件12-2附近的通过区域a。此外,控制装置100在从处理组件12-2内送出基片w时,也能够以同样的方法判断基片w是否通过了处理组件12-2附近的通过区域a。
[0111]
本实施方式的处理系统1包括受光部21a和受光部21b、和将从照射部20照射的光向受光部21a和受光部21b中的任意一个反射的反射镜22。反射镜22是反射部的一例。由此,在本实施方式的处理系统1中,与现有的判断方法相比,能够削减照射部20的数量。
[0112]
此外,作为其他例子,例如图14所示,也可以通过判断1个受光部21接收到从照射部20a和照射部20b中的哪一个照射的光,来判断基片w被送入到处理组件12-1和12-2中的哪一个。图14是表示在第4实施方式中向基片w照射的光的光路的另一例的图。
[0113]
在基片w被送入到处理组件12-1内时,从照射部20a照射到处理组件12-1附近的通过区域a的光例如图14的虚线箭头所示,被从通过区域a通过的基片w遮断,所以不向反射镜22入射。因此,从照射部20a照射的光不被受光部21接收。
[0114]
另外,在基片w被送入到处理组件12-2内时,从照射部20b照射到处理组件12-2附近的通过区域a的光例如图14的实线箭头所示,在从通过区域a通过的基片w上的反射位置p被反射,并向受光部21入射。另一方面,从照射部20a照射的光被反射镜22反射,但例如图14的虚线箭头所示,被通过处理组件12-2附近的通过区域a的基片w遮断,所以不向受光部21入射。
[0115]
控制装置100在不同的时刻控制照射部20a的光的照射和照射部20b的光的照射,判断受光部21在哪个时刻接收到光。在受光部21没有接收到从照射部20a和照射部20b中的任一个照射的光的情况下,控制装置100能够判断为基片w通过了处理组件12-1附近的通过区域a。另一方面,在受光部21接收到从照射部20b照射的光的情况下,控制装置100能够判断为基片w通过处理组件12-2附近的通过区域a。此外,在受光部21接收到从照射部20a照射的光的情况下,控制装置100能够判断为基片w没有通过处理组件12-1附近和处理组件12-2附近中的任一通过区域a。在图14所例示的结构中,与现有的判断方法相比,能够削减受光部21的数量。
[0116]
此外,本实施方式的判断方法在处理组件12、负载锁定组件13等装置在横向上相邻配置3个以上的情况下也能够应用。图15是表示在第4实施方式中向基片w照射的光的光路的另一例的图。在图15的例子中,受光部21具有受光部21a、受光部21b、受光部21c和受光部21d。另外,在图15的例子中,设置有反射镜22a、反射镜22b、反射镜22c、反射镜22d和反射镜22e。
[0117]
在基片w被送入到处理组件12-1内时,从照射部20照射到处理组件12-1附近的通过区域a的光例如图15所示,在从通过区域a通过的基片w上的反射位置pa被反射,并向受光部21a入射。在该情况下,从照射部20照射的光不入射到受光部21b、受光部21c和21d。控制装置100在由受光部21a接收到光的情况下,能够判断为基片w通过了处理组件12-1附近的通过区域a。此外,控制装置100在从处理组件12-1内送出基片w时,也能够以同样的方法判断基片w是否通过了处理组件12-1附近的通过区域a。
[0118]
另外,在基片w被送入到处理组件12-2内时,从照射部20照射到处理组件12-1附近
的通过区域a的光例如图15所示,被反射镜22a和反射镜22b反射。由反射镜22a和反射镜22b反射的光照射到处理组件12-2附近的通过区域a。照射到处理组件12-2附近的通过区域a的光在从通过区域a通过的基片w上的反射位置pb被反射,并向受光部21b入射。在该情况下,从照射部20照射的光不入射到受光部21a、受光部21c和21d。控制装置100在由受光部21b接收到光的情况下,能够判断为基片w通过了处理组件12-2附近的通过区域a。此外,控制装置100在从处理组件12-2内送出基片w时,也能够以同样的方法判断基片w是否通过了处理组件12-2附近的通过区域a。
[0119]
另外,在基片w被送入到处理组件12-3内时,从照射部20照射到处理组件12-1附近的通过区域a的光例如图15所示,被反射镜22a~22d反射,照射到处理组件12-3附近的通过区域a。照射到处理组件12-3附近的通过区域a的光在从通过区域a通过的基片w上的反射位置pc反射,入射到受光部21c。在该情况下,从照射部20照射的光不入射到受光部21a、受光部21b和21d。控制装置100在由受光部21c接收到光的情况下,能够判断为基片w通过了处理组件12-3附近的通过区域a。此外,控制装置100在从处理组件12-3内送出基片w时,也能够以同样的方法判断基片w是否通过了处理组件12-3附近的通过区域a。
[0120]
另外,在受光部21d接收到来自照射部20的光的情况下,控制装置100能够判断为基片w没有通过处理组件12-1附近、处理组件12-2附近和处理组件12-3附近中的任一通过区域a。在图15那样的结构中,与现有的判断方法相比,也能够削减照射部20的数量。此外,在受光部21a~21c均没有接收到来自照射部20的光的情况下,控制装置100也可以判断为基片w没有通过任何通过区域a。在该情况下,不需要反射镜22e和受光部21d。
[0121]
另外,作为其他例子,例如图16所示,也可以通过判断1个受光部21接收到从照射部20a~20c中的哪一个照射的光,来判断基片w被送入到处理组件12-1~12-3中的哪一个。图16是表示在第4实施方式中向基片w照射的光的光路的另一例的图。
[0122]
在基片w被送入到处理组件12-1内时,从照射部20a照射到处理组件12-1附近的通过区域a的光例如图16所示,在从通过区域a通过的基片w上的反射位置pa反射。在反射位置pa反射的光分别在反射镜22a~22d反射,入射到受光部21。另一方面,从照射部20b向处理组件12-2附近的通过区域a照射的光、和从照射部20c向处理组件12-3附近的通过区域a照射的光不被基片w反射,所以不向受光部21入射。
[0123]
另外,在基片w被送入到处理组件12-2内时,从照射部20b照射到处理组件12-2附近的通过区域a的光例如图16所示,在从通过区域a通过的基片w上的反射位置pb被反射。在反射位置pb反射的光分别在反射镜22c和反射镜22d被反射,入射到受光部21。另一方面,从照射部20a向处理组件12-1附近的通过区域a照射的光、和从照射部20c向处理组件12-3附近的通过区域a照射的光不被基片w反射,所以不向受光部21入射。
[0124]
另外,在基片w被送入到处理组件12-3内时,从照射部20c照射到处理组件12-3附近的通过区域a的光例如图16所示,在从通过区域a通过的基片w上的反射位置pc被反射。在反射位置pc反射的光入射到受光部21。另一方面,从照射部20a照射到处理组件12-1附近的通过区域a的光、和从照射部20b照射到处理组件12-2附近的通过区域a的光不被基片w反射,所以不向受光部21入射。
[0125]
控制装置100在不同的时刻控制照射部20a~20c各自的光的照射,判断受光部21在哪个时刻接收到光。在受光部21接收到从照射部20a照射的光的情况下,控制装置100能
够判断为基片w通过处理组件12-1附近的通过区域a。另外,在受光部21接收到从照射部20b照射的光的情况下,控制装置100能够判断为基片w通过处理组件12-2附近的通过区域a。另外,在受光部21接收到从照射部20c照射的光的情况下,控制装置100能够判断为基片w通过处理组件12-3附近的通过区域a。
[0126]
此外,在受光部21没有接收到从照射部20a~20c中的任一个照射的光的情况下,控制装置100能够判断为基片w没有通过任何通过区域a。在图16所例示的结构中,与现有的判断方法相比,能够削减受光部21的数量。
[0127]
[其他]
[0128]
此外,本技术所公开的技术并不限定于上述的实施方式,能够在其主旨的范围内进行各种变形。
[0129]
例如,在上述的各实施方式中,照射部20向从通过区域a通过的基片w的上表面倾斜地照射光,但优选从照射部20照射的光被照射到基片w的区域中的没有形成元件的区域。由此,能够防止从照射部20照射的光被形成于基片w的元件漫反射而使得向受光部21入射的光量减少。
[0130]
另外,照射部20在向从通过区域a通过的基片w照射光的情况下,也可以向基片w中形成元件的面的背面照射光。在该情况下,也能够防止从照射部20照射的光被形成于基片w的元件漫反射而使得向受光部21入射的光量减少。
[0131]
此外,应该认为本次公开的实施方式在所有方面都是例示而不是限制性的。实际上,上述的实施方式能够以多种方式具体实现。另外,上述的实施方式在不脱离所附的权利要求书及其主旨的情况下,可以以各种方式进行省略、置换、变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。