包括多个空间光调制器的散斑减少的直接视网膜全息投影仪
1.引言本部分中提供的信息用于一般地呈现本公开的背景的目的。在本部分中描述的范围内,当前命名的发明人的工作,以及在提交时可能以其他方式不符合现有技术的描述的方面,既不明确也不隐含地被认为是针对本公开的现有技术。
技术领域
2.本公开涉及车辆的直接视网膜投影全息显示系统和平视显示系统。
背景技术:
3.显示设备被用于各种各样的应用中。一些示例显示设备是平板显示器、投影显示器和平视显示器。显示设备可以是透射型或反射型的。
4.传统上,车辆的驾驶员通过车窗、挡风玻璃和车辆的其他玻璃观察车辆周围。驾驶员可以基于驾驶员对车辆周围的视觉观察来控制车辆加速、减速和转向。车辆可以包括向驾驶员显示各种信息的一个或多个显示器。例如,一些车辆包括信息娱乐系统,该系统包括显示各种信息娱乐和其他车辆信息的显示器。车辆还可以包括平视显示器(hud),该平视显示器通过利用挡风玻璃的反射在一定距离处形成虚像来显示信息。例如,hud可以显示车辆速度和其他车辆信息(例如,警告,诸如车道偏离警告和防撞警告)。
技术实现要素:
5.提供了一种直接视网膜全息投影系统,并且其包括第一空间光调制器、第二空间光调制器和控制模块。第一空间光调制器被配置成接收来自光源的光束,并且以预定频率抖动该光束,以提供该光束的多个实例。第二空间光调制器被配置成接收来自第一空间光调制器的光束的实例,显示要投影的图形图像的编码相位全息图,并且衍射光束的实例,以提供具有与图形图像相同的图形信息、但是乘以抖动波前的编码相位全息图的实例。控制模块被配置成:迭代地调整第一空间光模块的参数,以生成光束的实例;以及控制第二空间光调制器的操作,以基于光束的实例,通过将图形图像的编码相位全息图的实例导向反射器或观看者的眼睛,在观看者的眼睛的视网膜上显示图形图像的多个实例。
6.在其他特征中,在不在漫射体上形成实像的情况下,并且在不用反射镜反射图像的情况下,第二空间光调制器将编码相位全息图的实例直接引导到观看者的眼睛处。
7.在其他特征中,第二空间光调制器将编码相位全息图的实例直接引导到反射器上,以在不在漫射体上形成实像的情况下被观看者的眼睛看到。反射器是车辆的挡风玻璃。
8.在其他特征中,控制模块被配置成经由第一空间光调制器、以大于或等于60赫兹的频率抖动光束。
9.在其他特征中,控制模块被配置成以预定频率在第一角度与第二角度之间抖动光束。
10.在其他特征中,第一角度与第二角度之间的差小于或等于5
°
。
11.在其他特征中,第一角度与第二角度之间的差小于或等于1
°
。
12.在其他特征中,第一空间光调制器包括数字光处理微机电系统反射镜。
13.在其他特征中,第一空间光调制器包括活塞模式空间光调制器。
14.在其他特征中,第一空间光调制器包括铁电液晶空间光调制器。
15.在其他特征中,直接视网膜全息投影系统进一步包括设备驱动器。控制模块被配置成控制设备驱动器生成一个或多个驱动电压。第一空间光调制器基于驱动电压改变抖动角度。
16.在其他特征中,提供了一种操作直接视网膜全息投影系统的方法。该方法包括:在第一空间光调制器处接收来自光源的光束;以预定频率抖动光束以提供光束的多个实例,其中,抖动包括迭代地调整第一空间光模块的参数以生成光束的实例;在第二空间光调制器处接收光束的实例;将光束的实例转换成编码相位全息图的多个实例;以及控制第二空间光调制器的操作,以基于光束的实例,通过将编码相位全息图的实例导向反射器或观看者的眼睛,在观看者的眼睛的视网膜上显示图像的多个实例。
17.在其他特征中,该方法进一步包括:将编码相位全息图的实例直接从第二空间光调制器引导到反射器或观看者的眼睛。
18.在其他特征中,光束经由第一空间光调制器、以大于或等于60赫兹的频率抖动。
19.在其他特征中,光束经由第一空间光调制器、在第一角度与第二角度之间、以预定频率抖动。
20.在其他特征中,第一角度与第二角度之间的差小于或等于5
°
。
21.在其他特征中,第一角度与第二角度之间的差小于或等于5
°
。
22.在其他特征中,光束的抖动包括:改变第一空间光调制器的数字光处理微机电系统反射镜的驱动电压。
23.在其他特征中,光束的抖动包括:改变活塞模式空间光调制器的驱动电压。
24.在其他特征中,光束的抖动包括:改变铁电液晶空间光调制器的驱动电压。
25.本发明提供了以下技术方案:1. 一种直接视网膜全息投影系统,其包括:第一空间光调制器,其被配置成接收来自光源的光束,并且以预定频率抖动所述光束,以提供所述光束的多个实例;第二空间光调制器,其被配置成接收来自所述第一空间光调制器的光束的多个实例,显示要投影的图形图像的编码相位全息图,并且衍射光束的所述多个实例,以提供具有与所述图形图像相同的图形信息、但是乘以多个抖动波前的编码相位全息图的多个实例;以及控制模块,其被配置成迭代地调整所述第一空间光模块的参数,以生成光束的多个实例,以及控制所述第二空间光调制器的操作,以基于所述光束的所述多个实例,通过将所述图形图像的编码相位全息图的所述多个实例导向反射器或观看者的眼睛,在观看者的眼睛的视网膜上显示所述图形图像的多个实例。
26.2. 根据技术方案1所述的直接视网膜全息投影系统,其中,在不在漫射体上形成实像的情况下,并且不用反射镜反射所述图像的情况下,第二空间光调制器将所述编码相
位全息图的多个实例直接引导到观看者的眼睛处。
27.3. 根据技术方案1所述的直接视网膜全息投影系统,其中:所述第二空间光调制器将所述编码相位全息图的所述多个实例直接引导到所述反射器处,以在不在漫射体上形成实像的情况下被观看者的眼睛看到;以及所述反射器是车辆的挡风玻璃。
28.4. 根据技术方案1所述的直接视网膜全息投影系统,其中,所述控制模块被配置成经由所述第一空间光调制器、以大于或等于60赫兹的频率抖动所述光束。
29.5. 根据技术方案1所述的直接视网膜全息投影系统,其中,所述控制模块被配置成以预定频率在第一角度与第二角度之间抖动光束。
30.6. 根据技术方案5所述的直接视网膜全息投影系统,其中,所述第一角度与所述第二角度之间的差小于或等于5
°
。
31.7. 根据技术方案5所述的直接视网膜全息投影系统,其中,所述第一角度与所述第二角度之间的差小于或等于1
°
。
32.8. 根据技术方案1所述的直接视网膜全息投影系统,其中,所述第一空间光调制器包括:数字光处理微机电系统反射镜。
33.9. 根据技术方案1所述的直接视网膜全息投影系统,其中,所述第一空间光调制器包括活塞模式空间光调制器。
34.10. 根据技术方案1所述的直接视网膜全息投影系统,其中,所述第一空间光调制器包括铁电液晶空间光调制器。
35.11. 根据技术方案1所述的直接视网膜全息投影系统,进一步包括设备驱动器,其中:所述控制模块被配置成控制所述设备驱动器生成一个或多个驱动电压;以及所述第一空间光调制器基于所述驱动电压改变抖动角度。
36.12. 一种操作直接视网膜全息投影系统的方法,所述方法包括:在第一空间光调制器处接收来自光源的光束;以预定频率抖动光束以提供光束的多个实例,其中,所述抖动包括迭代地调整第一空间光模块的参数以生成光束的多个实例;在第二空间光调制器处接收所述光束的多个实例;将所述光束的多个实例转换成编码相位全息图的多个实例;以及控制所述第二空间光调制器的操作,以基于所述光束的多个实例,通过将所述编码相位全息图的多个实例导向反射器或观看者的眼睛,在观看者的眼睛的视网膜上显示图像的多个实例。
37.13. 根据技术方案12所述的方法,进一步包括:将所述编码相位全息图的多个实例直接从所述第二空间光调制器引导到反射器或观看者的眼睛。
38.14. 根据技术方案12所述的方法,其中,光束经由所述第一空间光调制器、以大于或等于60赫兹的频率抖动。
39.15. 根据技术方案12所述的方法,其中,所述光束经由第一空间光调制器、在第一角度与第二角度之间、以预定频率抖动。
40.16. 根据技术方案15所述的方法,其中,所述第一角度与所述第二角度之间的差
小于或等于5
°
。
41.17. 根据技术方案15所述的方法,其中,所述第一角度与所述第二角度之间的差小于或等于5
°
。
42.18. 根据技术方案12所述的方法,其中,光束的抖动包括:改变第一空间光调制器的数字光处理微机电系统反射镜的驱动电压。
43.19. 根据技术方案12所述的方法,其中,光束的抖动包括:改变活塞模式空间光调制器的驱动电压。
44.20. 根据技术方案12所述的方法,其中,光束的抖动包括:改变铁电液晶空间光调制器的驱动电压。
45.从具体实施方式、权利要求和附图中,本公开另外的应用领域将变得显而易见。具体实施方式和具体示例仅旨在说明的目的,并且不旨在限制本公开的范围。
附图说明
46.从具体实施方式和附图中,将会更全面地理解本公开,其中:图1是根据本公开的直接视网膜全息投影系统的示例的功能框图;图2是包括hud的车辆的示例内部的透视图;图3是图1的直接视网膜全息投影系统的示例实现方式的功能框图;图4图示了根据本公开的示例性直接视网膜全息投影方法;图5是包括示例分辨的、半分辨的和未分辨的标绘图的示图;图6是根据本公开的硅基液晶(lcos)空间光调制器(slm)的示例的截面图;图7是根据本公开的lcos slm和控制模块的一部分的示例的功能框图;以及图8是根据本公开的示例性切换slm和对应的设备驱动器和控制模块的功能框图。
47.在附图中,附图标记可以重复使用来标识相似和/或相同的元件。
具体实施方式
48.车辆可以包括全息hud,该全息hud包括slm和相干或部分相干光源。相位全息图被编码在slm上。来自相干或部分相干光源的光照射利用相位全息图编码的slm,并且光以全息图规定的方式进行衍射。衍射光被车辆的挡风玻璃反射,并且在驾驶员的视网膜上形成实像。
49.显示系统通常采用相干光源,诸如激光器,其与其他显示部件结合。相干光可以指代在空间和时间上同相的光。当相干光从漫射表面反射时,会产生大量的“散斑”。当相干光从漫射表面反射时,表面上的各个点均发射光波。通常,反射光波具有相同的频率,但是从表面上的不同点反射的光的相位可以变化,从而由于准随机干涉而导致颗粒的、不均匀的强度。反射光进行相长干涉和相消干涉,以产生随机的光图案和暗斑或条带。整个非均匀图案被称为“散斑”。当由反射光形成图像时,散斑给图像添加了噪声。
50.一些全息投影系统通过振动一个或多个漫射体、或者通过包括和操作有源漫射体(诸如振动投影屏)来减少散斑。在不首先将光从漫射体反射的情况下,这些类型的全息投影系统不直接将相位全息图投影到观看所生成图像的人的视网膜处。
51.在直接视网膜投影全息显示系统中,在不被漫射体反射的情况下,投影的相位全
息图被引导到观看者的眼睛。尽管去除漫射体减少了全息显示系统中的散斑量,但是由于光从例如一个或多个其他表面反射,仍然会出现一些散斑。本文中阐述的示例包括:直接视网膜投影全息显示系统,该系统不包括漫射体,并且被配置成减少和/或消除散斑的量。直接视网膜投影全息显示系统包括:多个空间光调制器(slm),它们包括用于抖动的快速切换slm和用于全息图生成的第二slm。第二slm可以是硅基液晶(lcos)。快速切换slm作为光抖动slm来执行,该光抖动slm在预定角度之间并且以高频(例如,大于或等于60赫兹(hz))抖动光束。这种抖动是在lcos slm生成编码全息图之前提供的,这减少了观看者看到的图像的散斑和/或模糊。
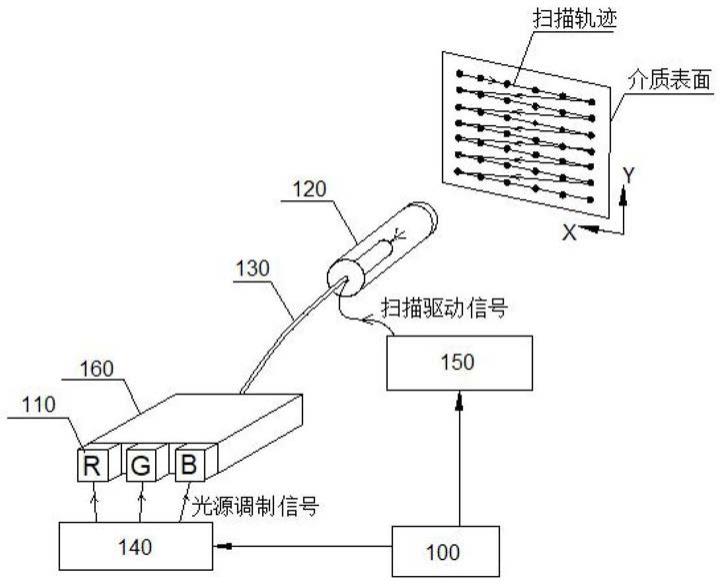
52.图1示出了直接视网膜全息投影系统110的示例,其包括一个或多个光源(或激光源)112(示出了一个激光器112)、扩束器114、切换(或第一)slm 16、lcos(或第二)slm 118和控制模块120。激光器112生成激光束122,该激光束在扩束器114处被接收。扩束器114扩展激光束122的宽度,以提供扩展光束124。
53.切换式slm 116接收扩展光束124,并且迭代地改变在lcos slm 118处反射的扩展光束124的入射角,以提供抖动的扩展光束128。虽然本文中主要指代的是lcos slm,但是第二slm 118可以用不同类型的slm来替换。抖动的扩展光束128包括扩展光束124的多个实例。控制模块120切换切换式slm 116的角度状态和/或反射镜高度,从而以高频(例如,大于或等于60 hz)改变扩展光束124的入射角。扩展光束124被抖动以提供处于以相应入射角的多个光束,被称为抖动的扩展光束128。抖动的扩展光束128可以被视为以稍微不同的入射角照射lcos slm 118的多个光源。
54.示出了在三个不同时间处出现的相同光束(或三个光束)的三个不同事件的示例入射矢量,以说明扩展光束124的入射角的变化。矢量的角度相对于例如切换式slm 116的前表面129处于锐角预定角度(例如,45
°
)。矢量相对于矢量的角度的角度被分别表示为和。角度可以可以相等,并且是角度的相反数。例如,可以是-1
°
,并且可以是1
°
。作为另一个示例,扩展光束124可以从参考角度(例如,45
°
)抖动
±
2.5
°
或以上,其总扫描范围小于或等于5
°
。角度和以及角度与之间的差可以被称为抖动角度,和/或定义扩展光束124从切换式slm 116到lcos slm 118的投影方向上的变化的角度。尽管示出了三个矢量,但扩展光束124可以以任何预定和/或所选图案、在任何数量的角度之间抖动。
55.切换式slm 116可以被实现为快速开关空间光调制器阵列,每个具有小于1毫秒(ms)的响应时间。作为第一示例,快速开关空间光调制器阵列可以包括数字光处理(dlp)微机电系统(mems)反射镜。设备驱动器140中的一个控制dlp mems反射镜的倾斜角。这些角度基于由设备驱动器140中的一个提供的输入驱动电压,并且更改被提供给lcos slm 118的光束的入射角。
56.作为第二示例,切换式slm 116可以被实现为一个或多个活塞模式slm,其中活塞模式slm的反射镜高度由相应的输入驱动电压调节。切换式slm 16可以包括活塞模式slm阵列,并且控制模块120的设备驱动器140中的一个可以提供相应的输入驱动电压。改变反射镜的高度会更改被提供给lcos slm 118的光束的合成入射角。
。
66.等式3-4提供了t1等效表示,其示出了(或入射角矢量的变化)。等式5-6表示从t2和t3到t1的转换,其中包括不同时间处的波矢量。
67.基于等式7和等式8中描述的傅立叶变换的移位定理,频域中波矢量k的倾斜导致投影图形中的移位。
68.由切换式slm 116提供的上述倾斜使波前倾斜,这引起在视网膜上形成的实像中的移位p(x,y)。视网膜对接收到的图像进行平均,这减少和/或消除了散斑和/或模糊,并且提供了没有散斑和/或模糊区域的单个图像。
69.图2示出了来自车辆200的驾驶员座椅的示例性透视图。车辆200包括:位于车辆200前开口的挡风玻璃204。车辆200的客舱208内的乘客可以透过挡风玻璃204看到车辆200的前方。虽然描述了陆基载具的示例,但是本技术也适用于空基载具(例如,飞机、直升机等)和水基载具(例如,船只等)。而且,尽管本文中公开了一些关于载具实现方式的示例,但是这些示例适用于非载具实现方式。
70.如图2所示,挡风玻璃204在视觉上位于车辆200的仪表板206上方。车辆200可以包括方向盘210。车辆200可以是自主车辆、半自主车辆或非自主车辆。
71.hud系统300(诸如图3所示)将图2所示的全息图212通过仪表板204中的孔径216投影到挡风玻璃204的一部分上。全息图212包括各种车辆信息,诸如车辆200的当前速度、车辆200的变速器的当前档位、发动机速度、车辆200的方向航向、当前信息娱乐系统设置和/或其他车辆信息。全息图212向车辆的驾驶员呈现数据,而驾驶员不必将视线从车辆前方的物体移开。如下面进一步讨论的,全息图212包括由本文中公开的抖动所提供的一个全息图的复制实例。
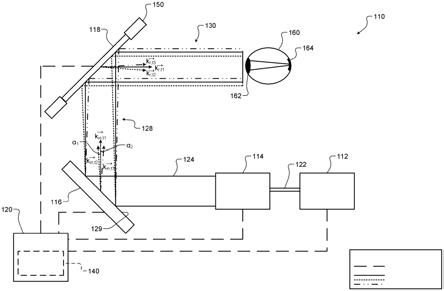
72.图3示出了hud系统300,其包括车辆的反射器302和图1的直接视网膜全息投影系统100,该系统带有控制模块120的修改版本(被标识为控制模块120’)。在所示示例中,反射
器被实现为挡风玻璃,但是可以是不同的反射器。控制模块120可以执行上述操作和附加操作,诸如确定经由反射器(或挡风玻璃302)显示的车辆信息。直接视网膜全息投影系统100包括一个或多个光源(示出了一个激光器112)、扩束器114、切换式slm 116、lcos slm 118和控制模块120’。激光器112生成激光束122,其在扩束器114处被接收。扩束器114扩展激光束122的宽度,以提供扩展光束124。
73.切换式slm 116接收扩展光束124,并且迭代地改变在lcos slm 118处反射的扩展光束124的入射角,以提供包括扩展光束124的多个实例的抖动的扩展光束128。控制模块120’切换切换式slm 116的角度状态和/或反射镜高度,从而以高频(例如,大于或等于60 hz)改变扩展光束124的入射角。抖动的扩展光束128被抖动,以在相应的入射角下提供多个光束。
74.示出了在三个不同时间处出现的相同光束(或三个光束)的三个不同发生的示例性入射矢量,以说明扩展光束124的入射角的变化。可以如上所述地配置和控制切换式slm 116。
75.lcos slm 118接收抖动的扩展光束128,并且基于来自控制模块120’的控制信号对抖动的扩展光束128进行编码和转换,以提供编码相位全息图光束130。编码相位全息图光束130也具有多个不同的出现(或实例),它们处于不同的相应反射角。示出了示例性反射矢量,用于三个不同的发生和三个不同的反射角度。这三个不同的发生直接对应于由切换式slm 116执行的抖动。
76.控制模块120’可以包括一个或多个显示驱动器140。一个或多个显示驱动器140可以调节切换式slm 116的角度状态和/或反射镜高度。另一个或多个显示驱动器140可以被用来控制lcos slm 118的状态。显示驱动器140可以在控制模块120’处和/或在切换式slm 116和/或lcos slm 118处实现。
77.lcos slm 118可以包括限制孔径150以减轻杂散光。限制孔径150可以被实现为保持lcos slm 118的框架。
78.图4示出了直接视网膜全息投影方法,其可以由图3的直接视网膜全息投影系统100和控制模块120’实现。尽管以下操作主要是关于图3的实现方式来描述的,但可以容易地修改操作以应用于本公开的其他实现方式。这些操作可以迭代地执行。
79.该方法可以在400开始。在402,控制模块120’确定抖动角度和用于在角度之间切换的切换(或抖动)频率。这可以包括:确定切换模式和/或抖动角度的次序,确定反射镜倾斜角,和/或确定一个或多个活塞模式空间光调制器的高度。抖动角度和/或其他对应的信息可以基于(i)切换式slm 116与lcos slm 118之间的预定距离,(ii)lcos slm 118与反射器302之间的预定距离,和/或(iii)反射器302与观看者的眼睛之间的距离的预定估计来确定。其他对应的信息可以直接与抖动角度相关,并且包括从切换式slm 116输出的光束的倾斜角、反射镜倾斜角、活塞模式空间光调制器的高度等。确定抖动角度是为了防止观看者分辨出投影图像的移位实例。当投影图像的实例被分辨时,观看者就会看到散斑和/或模糊的图像。
80.图5示出了包括示例性分辨的标绘图500、示例性半分辨的标绘图502和示例性未分辨的标绘图504的示图。示出了瑞利准则值σ,并且其直接与切换式slm 116的所选抖动角
度有关。瑞利准则值σ是绘制的强度信号的峰值之间的距离。强度信号可以指代同一图像的不同实例。抖动角度越大,瑞利准则值σ就越大,并且图像对观看者来说分辨率就越高。抖动角度越小,瑞利准则值σ就越小,并且图像对观看者来说就越难以分辨。控制模块120’确定抖动角度和/或其他相关信息在适当的范围内,使得图像的实例未被分辨。例如,控制模块120’可以选择切换式slm 116的倾斜和/或抖动角度小于预定角度。随着倾斜和/或抖动角度增加到预定角度以上,图像的实例变成半分辨的。
81.参考图4,在404,控制模块120’激活激光器112以生成激光束122。激光束122被引导到扩束器114,该扩束器114扩展激光束122以提供扩展激光束124,该扩展激光束124被提供给切换式slm 116。
82.在406,控制模块120’控制切换式slm 116的抖动。抖动是通过快速切换切换式slm 116将扩展激光束124引导成slm 118上稍微不同的入射角来实现的。这可以包括经由一个或多个设备驱动器140基于所确定的抖动角度和所选切换(或抖动)频率生成驱动电压,以更改切换式slm 116的倾斜角、切换式slm 116的反射镜的倾斜角、(一个或多个)活塞模式空间光调制器的高度等。抖动和切换(或扫描)角度被设置成使得在观看者的视网膜上形成的斑的抖动是不可分辨的。切换式slm 116可以抖动来自准直光源(诸如激光器112和扩束器114)的光,并且在每个图像帧的显示期间,引起到lcos slm 118上的多个照明入射角。
83.在408,控制模块120’控制lcos slm 118的操作,以显示要投影的图形的相位全息图。具有图形相位全息图的lcos slm 118用抖动的扩展激光束124照射,并且生成编码相位全息图光束130。编码相位全息图光束130包括不同角度下的相同相位全息图的实例,如图3所示。这可以包括控制一个或多个设备驱动器140生成驱动电压,来控制lcos slm 118的状态。
84.在410,编码相位全息图的实例可以经由反射器302指向观看者的眼睛。入射角略有不同的反射全息图形成轻微移位的图像。图像的散斑被观看者的视网膜轻微移位和进行平均,使得观看者看到减少量的散斑或者看不到任何散斑。
85.相位全息图可以基于来自车辆控制模块的信号来生成。控制模块120’可以被实现为车辆控制模块,或者可以与车辆控制模块通信。控制模块120’基于车辆数据生成相位全息图。控制模块120’可以例如从车辆的通信总线获得车辆数据。例如,车辆数据可以包括车辆的当前速度、车辆变速器的当前档位、当前发动机速度、车辆的当前方向航向、当前信息娱乐系统设置和/或其他车辆信息。该方法可以在412结束。
86.图6示出了图1和图3的lcos slm 118的示例。lcos slm 118可以被用于本文中公开的任何实施例。lcos slm 118可以包括硅背板层602;lcos slm(或相位调制器)层,其包括电路(或像素化电极)层604、第一对准层608、液晶层610、第二对准层612和透明电极层614;以及玻璃衬底层616。
87.电路层604包括用于控制液晶层610的控制电路和/或像素驱动器。电路层604可以包括用于每个像素的晶体管。每个像素独立地调制从lcos slm出射的光的相位。例如,如果被提供给像素的电压不同,那么从lcos slm的对应部分出射的光射线的相位就具有不同的相位。每一个像素可以具有相关联的电压设定。被提供给每个像素的电压范围可以在例如0-2π之间改变相位全息图光束130的对应部分的相位,以提前或延迟来自lcos slm 118的光波的对应部分。
88.电路层604控制从液晶层610发射的光的量和相位。液晶层610中以及与lcos slm 118的像素相关联的分子取向随着电压而变化。分子的电压相关取向在lcos slm 118上引起空间变化的相位分布。取决于液晶的物理性质,被调制的相位量与施加的电压之间的关系可以是正相关的或负相关的。lcos slm层将关于图7进一步描述。lcos slm 118当被实现为反射全息投影仪时可以包括反射膜层。
89.图7示出了lcos slm层的一部分700和控制模块120’,其可以在图1和图3的实施例中实现。lcos slm层可以包括布置成阵列并且连接到驱动电路706、708的像素704。lcos slm层还可以包括:slm控制模块710,其可以控制驱动器电路706和708。驱动器电路706、708可以经由开关707、709从slm控制模块710或控制模块120’接收电力。slm控制模块710可以直接从波前传感器接收信号、和/或从控制模块120’接收控制信号。控制模块120’可以接收相位检测信号,并且控制slm控制模块710的操作,以调节被提供给像素704的电压。在另一个实施例中,slm控制模块710直接接收相位检测信号,并且控制驱动电路706、708,以生成应用在像素704处的适当电压。
90.图8示出了控制模块120’、设备驱动器140中的一个和切换式slm 116。如上所述,切换式slm 116可以包括dlp mems反射镜阵列800、活塞模式空间光调制器阵列802和/或一个或多个铁电液晶空间光调制器804。设备驱动器140可以被实现为控制模块120’的一部分、或者切换式slm 116的一部分。
91.前面的描述本质上仅仅是说明性的,并且绝不旨在限制本公开、其应用或用途。本公开的广泛教导可以以各种各样的形式实现。因此,尽管本公开包括特定的示例,但是本公开的真实范围不应该如此受限,因为在研究附图、说明书和所附权利要求后,其他修改将变得显而易见。应当理解,方法中的一个或多个步骤可以以不同的次序(或同时)执行,而不更改本公开的原理。另外,尽管每一个实施例在上文被描述为具有某些特征,但是关于本公开的任何实施例所描述的那些特征中的任何一个或多个都可以在任何其他实施例中实现、和/或与任何其他实施例的特征进行组合,即使该组合没有被明确描述。换句话说,所描述的实施例不是相互排斥的,并且一个或多个实施例彼此的置换仍在本公开的范围内。
92.元件之间的空间和功能关系(例如,模块、电路元件、层等之间的关系)是使用各种术语来描述的,术语包括“连接”、“接合”、“耦合”、“邻近”、“紧挨着”、“在
……
上面”、“在
……
以上”、“在
……
下面”和“布置”。除非明确描述为“直接的”,否则当在上述公开内容中描述第一与第二元件之间的关系时,该关系可以是在第一与第二元件之间不存在其他介入元件的直接关系,但是也可以是在第一与第二元件之间存在一个或多个介入元件(在空间上或功能上)的间接关系。如本文中使用的,短语“a、b和c中的至少一个”应该被解释为使用非排他性逻辑“或(or)”来表示逻辑“a或(or)b(or)c”,而不应该被解释为“a中的至少一个、b中的至少一个和c中的至少一个”。
93.在各图中,箭头的方向(如箭头指示的)通常表明图示感兴趣的信息流(诸如数据或指令)。例如,当元件a和元件b交换各种各样的信息,但是从元件a传输到元件b的信息与图示相关时,箭头可以从元件a指向元件b。这个单向箭头并不意味着没有其他信息从元件a传输到元件b。另外,对于从元件a发送到元件b的信息,元件b可以向元件a发送对该信息的请求或接收确认。
94.在本技术中,包括以下定义,术语“模块”或术语“控制器”可以用术语“电路”替换。
术语“模块”可以指代、作为其一部分、或包括:专用集成电路(asic);数字、模拟或混合模拟/数字离散电路;数字、模拟或混合模拟/数字集成电路;组合逻辑电路;现场可编程门阵列(fpga);执行代码的处理器电路(共享的、专用的或群组);存储由处理器电路执行的代码的存储器电路(共享的、专用的或群组);提供所述功能的其他合适的硬件部件;或上述内容的一些或全部的组合,诸如在片上系统中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。