1.本发明涉及能够调整投掷时的制动力的钓鱼用卷线器、包含钓鱼用卷线器的制动力控制系统以及制动力设定装置。
背景技术:
2.以往,在使用两轴承卷线器将诱饵或钓线、配重、钓钩等投掷对象物向远方投掷时,为了防止投掷时的反冲(鱼线缠结),大多设置对卷筒进行制动的制动装置。在这样的制动装置中,在制动力被优化时能够投掷至最远方,但制动力过大时,会导致飞行距离的减少,另一方面,制动力过小时,会导致反冲。制动力的优化可能根据投掷的诱饵等的重量或空气阻力、钓线的种类、鱼竿的特性等使用的钓具的种类而变化。而且,也可能根据使用者的投掷方法、风等气象条件而变化。使用者在使用时需要一边进行反复试验一边调整制动力。
3.作为这样的钓鱼用卷线器,例如,在专利文献1中,公开了用于甩竿,对以旋转自如的方式安装于卷线器主体并安装有钓线的卷筒进行制动的两轴承卷线器的卷筒制动装置,该两轴承卷线器的卷筒制动装置具备:卷筒制动单元,其设置于卷筒和卷线器主体,并以能够电控制的方式对所述卷筒进行制动;第一操作器具,其以移动自如的方式设置于卷线器主体,并能够在多个第一操作位置进行操作;第二操作器具,其以移动自如的方式设置于卷线器主体,并能够在多个第二操作位置进行操作;以及卷筒控制单元,其根据第一操作器具的第一操作位置和第二操作器具的第二操作位置对卷筒制动单元的制动力进行电控制。
4.专利文献1:日本特开2007-135417号公报
技术实现要素:
5.然而,在专利文献1的结构中,制动力的变更仅通过两个操作器具进行,从而存在事实上难以进行更细致的设定的问题。而且,如果通过进一步增加操作器具来进行细致的设定,会导致钓鱼用卷线器的大型化,因此存在操作器具的增加存在局限的问题。进而,在使用者探寻最合适的投掷(甩竿)条件时,使用者难以准确地掌握刚刚的投掷(甩竿)结果,因此存在难以发现最合适的甩竿条件的问题。
6.本发明是鉴于上述情况而完成的,其目的在于提供能够简单地进行更详细的制动力的设定,并且能够准确地优化甩竿条件的钓鱼用卷线器、制动力控制系统以及制动力设定装置。本发明的除此以外的目的参照本说明书整体即可明确。
7.本发明的一个实施方式的钓鱼用卷线器构成为具备:卷筒,其能够卷绕钓线;卷筒制动部,其对该卷筒进行制动;以及卷筒制动力控制部,其能够控制该卷筒制动部的制动力,该钓鱼用卷线器具备能够接收来自外部设备的指示的接收部,当该接收部从该外部设备接收到关于制动力的指示时,该卷筒制动力控制部根据该指示设定制动力。
8.本发明的一个实施方式的制动力控制系统构成为具备信息通信装置,该信息通信装置具有:上述钓鱼用卷线器;制动力设定部,其能够设定卷筒的制动力;以及发送部,其发
送关于所设定的制动力的信息。
9.本发明的一个实施方式的制动力设定装置构成为具备:卷筒制动部,其对该卷筒进行制动;卷筒制动力控制部,其能够控制该卷筒制动部的制动力;卷筒的旋转检测部;投掷开始检测部;运算部,其根据投掷开始以后的卷筒的旋转历史运算投掷结果;以及制动力设定部,其能够设定卷筒的制动力,该制动力设定部能够显示该投掷结果。
10.本发明的一个实施方式的制动力控制系统或制动力设定装置构成为,所述卷筒制动力控制部能够控制制动力的时间变化,所述制动力设定部能够设定制动力的时间变化。
11.在本发明的一个实施方式的制动力控制系统或制动力设定装置中,构成为,卷筒制动力控制部能够控制与钓线的飞行距离对应的制动力的变化,制动力设定部能够设定与该钓线的飞行距离对应的制动力的变化。
12.本发明的一个实施方式的钓鱼用卷线器构成为具备:卷筒,其能够卷绕钓线;卷筒制动部,其对该卷筒进行制动;卷筒制动力控制部,其能够控制该卷筒制动部的制动力;以及制动力设定部,其能够设定该卷筒的制动力,该卷筒制动力控制部根据该制动力设定部的制动力的设定值设定制动力。
13.在本发明的一个实施方式的制动力设定程序中,该制动力设定程序使能够设定卷筒的制动力的制动力设定部在上述制动力控制系统、上述制动力设定装置、或上述钓鱼用卷线器上启动。
14.根据上述实施方式,能够提供能够简单地进行更详细的制动力的设定,并且能够准确地优化甩竿条件的钓鱼用卷线器、制动力控制系统以及制动力设定装置。
附图说明
15.图1是示出本发明的一个实施方式的制动力控制系统的图。
16.图2是示出本发明的一个实施方式的投掷时的投掷步骤的概要的图。
17.图3是对本发明的一个实施方式的制动力控制系统等的设定制动力的画面的例子进行说明的图。
18.图4是对本发明的一个实施方式的制动力控制系统等的设定制动力的画面的例子进行说明的图。
19.图5是对本发明的一个实施方式的制动力控制系统等的设定制动力的画面的例子进行说明的图。
20.图6是对本发明的一个实施方式的制动力控制系统等的设定制动力的画面的例子进行说明的图。
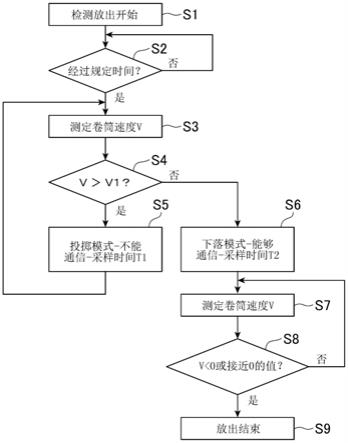
21.图7是对本发明的一个实施方式的制动力控制系统等的显示投掷结果的动作流程进行说明的图。
22.图8是对本发明的一个实施方式的制动力控制系统等的显示投掷结果的动作流程进行说明的图。
23.图9是对本发明的一个实施方式的制动力控制系统等的显示投掷结果的动作流程进行说明的图。
24.图10是示出本发明的另一实施方式的制动力控制系统的图。
25.标号说明
26.1:钓鱼用卷线器;2:离合器;3:卷筒;4:操作部;5:卷筒制动部;6:卷筒制动力控制部;8:旋转检测部;9:微型计算机;10:外部设备;11:制动力设定部;13:发送接收部(发送部);14:显示部;15:制动力制动部;16:制动力控制部;20:第二制动力设定部;51:涡电流产生板;52:固定磁铁;53:旋转磁铁;54:电动机;55:齿轮列;56:磁铁位置传感器;91:目标设定部;92:运算部;93:存储部;100:制动力控制系统;101:制动力设定装置。
具体实施方式
27.以下,参照附图对本发明的实施方式具体进行说明。对在多个附图中共同的构成要素在该多个附图中赋予相同的参照标号。需要注意的是,为了便于说明,各附图未必以准确的比例尺记载。
28.首先,参照图1对本发明的一个实施方式的钓鱼用卷线器1的结构进行说明。如图所示,本发明的一个实施方式的钓鱼用卷线器1具有:卷筒3,其卷绕钓线;操作部4,其对该卷筒3进行旋转操作;离合器2,其切换该操作部4与该卷筒3的动力能否传递;制动部(卷筒制动部)15,其对该卷筒3产生制动力;以及制动力控制部(卷筒制动力控制部)16,其调整制动力。
29.而且,如图所示,钓鱼用卷线器1具有检测该离合器的动力传递可否状态的离合器检测部7和检测卷筒3的旋转的旋转检测部8。离合器检测部7由磁传感器等构成,并通过在离合器2的可动部设置磁铁等被检测部,检测离合器2的传递可能/不能状态。而且,旋转检测部8能够由光电断路器等检测单元与设置于卷筒3的遮光板等被检测单元的组合构成。由此,能够将卷筒3的旋转转换为电信号。另外,检测单元与被检测单元的组合不限于上述例,能够利用磁铁和磁传感器等公知的单元。
30.而且,钓鱼用卷线器1具有处理各种信号的微型计算机9。微型计算机9通过未图示的电池等电源被供电,例如,具备对制动力控制部指示目标制动力的目标设定部91、根据卷筒旋转传感器的输出运算投掷结果的运算部92、获得诱饵20的信息的诱饵信息取得部93。
31.接着,如图1所示,电子设备(也称为外部设备、外部信息通信装置、外部信息通信装置等)10具备从使用者受理作为目标的制动力的制动力设定部11、对设定的制动力信息、投掷结果进行发送接收的发送接收部13以及lcd等显示单元14。
32.接着,对构成钓鱼用卷线器1的各要素进行说明。卷筒3被轴支承为能够相对于钓鱼用卷线器1旋转,能够通过正向旋转卷绕钓线,通过反向旋转放出所卷绕的钓线。操作部4例如构成为手柄,通过齿轮等传递机构将使用者旋转操作传递到卷筒3,从而能够使该卷筒3正向旋转。另外,操作部4也可以是杆等操作部件和电动机等动力源的组合。
33.离合器2能够在可向卷筒3传递动力传递可能的接合状态和不进行动力传递的断开状态之间切换。在接合状态下,能够通过操作部件3将卷筒3操作为正向旋转,在断开状态下,无论操作部件3的状态如何,都能够向正反方向旋转(卷筒自由状态)。
34.接着,参照图2对使用包含本卷线器的一般的卷线器投掷诱饵等渔具,并进行回收的步骤的一例进行说明。
35.首先,如图2的(a)所示,通过操作部件3将诱饵20调整为距离鱼竿前端的规定的长度,断开离合器2(未图示),从而成为卷筒自由状态。这时,用拇指按住卷线器1的卷筒3,以使钓线不会因诱饵20的自重等而放出。
36.接着,如图2的(b)~图2的(d)所示,通过挥出钓竿1,给予诱饵20初速度。然后,如图2的(e)所示,在诱饵的速度和放出方向适当的时机,使拇指离开卷筒3,则能够投掷诱饵20。
37.进而,在投掷后,在图2的(g)之后,诱饵20受到来自钓线的张力、空气阻力而开始减速。另一方面,卷筒3利用来自钓线的张力开始反向旋转。钓线的放出速度和诱饵20的飞行速度一致时,卷筒3成为最高转速,钓线失去张力。诱饵20在这之后也因空气阻力等而继续失速。这时,卷筒3通过惯性而继续高速旋转时,钓线的放出速度大于诱饵20的飞行速度。由此,钓线被多余地放出,从而在卷线器1内产生鱼线缠结。为了避免这种情况,能够在卷筒3通过制动装置5施加规定的制动力。
38.然后,诱饵20的高度充分降低从而着水。这时,制动装置5的制动力过大时,能够投掷诱饵20的距离变短。另一方面,制动装置5的制动力过小时,产生鱼线缠结,从而无法正常地进行卷绕、放出。制动力的适当值能够根据诱饵20的质量、空气阻力而变化。进而,根据竿的长度、投掷方法、风等自然环境等各种影响而变化。尤其是,在投掷中,钓线的状态动态地变化,因此为了实现最合适的制动条件,如果能够进行更细致的设定,就是有利的。而且,通过详细地掌握投掷结果,容易进行制动力的优化。
39.接着,对卷筒制动部15进行说明。卷筒制动部15由通过安装于卷筒3的导体构成的旋转体状的涡电流产生板、与涡电流产生板对置配置的固定磁铁、从固定磁铁的相反侧夹持涡电流产生板的旋转磁铁、使旋转磁铁旋转移动的电动机、对电动机的驱动进行减速并将其传递到第二永久磁铁的齿轮列以及检测永久磁铁的位置的磁铁位置传感器构成(均未图示)。
40.固定磁铁的外周部被六等分,并交替地被磁化为n极s极。而且,旋转磁铁的内周部被六等分,并交替地被磁化为n极s极。通过固定磁铁和旋转磁铁而制作的磁场贯通位于它们之间的涡电流产生板(均未图示)。因此,在卷筒3旋转时,在涡电流产生板产生涡电流,与旋转速度对应的制动力起作用。
41.通过该电动机和齿轮列使旋转磁铁旋转,由此能够使作用于涡电流产生板的磁场变化(均未图示,以下相同)。由此,能够将制动力设定为规定的量。即,使旋转磁铁和固定磁铁同极彼此进行对抗时,施加于涡电流产生板的磁场变弱,制动力变弱。使旋转磁铁和固定磁铁异极彼此进行对抗时,施加于涡电流产生板的磁场变强,制动力变强。
42.磁铁位置传感器是检测旋转磁铁的位置的传感器,由磁传感器、电阻式等公知的位置传感器构成。
43.制动力控制部16一边观察磁铁位置传感器的值一边使必要的电流在电动机流动,由此对电动机进行反馈控制。由此,能够向卷筒3施加规定的制动力。这样,能够通过制动部15和制动力控制部16使施加于卷筒3的制动力进行经时的变更。
44.另外,涡电流产生板能够由卷筒3的一部分构成。而且,涡电流产生板也可以根据卷筒3的旋转速度通过离心力的作用相对于卷筒3相对移动,由此具有规定的制动力特性。
45.而且,上述制动部15不限于上述那样的利用涡电流的方式,只要能够通过微型计算机经时地对制动力进行调整,就能够实现相同的效果。制动装置的其他方式存在有在安装于卷筒的永久磁铁与设置于卷线器主体的线圈之间产生再生制动的方式、使用通过电磁致动器等使对安装于卷筒的摩擦板的接触力变化的接触制动的方式,并不限定于特定的方
式。
46.本发明的一个实施方式的钓鱼用卷线器1构成为具备:卷筒3,其能够卷绕钓线;卷筒制动部15,其对该卷筒3进行制动;以及卷筒制动力控制部16,其能够控制该卷筒制动部15的制动力,该钓鱼用卷线器1具备能够接收来自外部设备的指示的接收部(发送接收部)94,在该接收部94从该外部设备10接收关于制动力的指示时,该卷筒制动力控制部16根据该指示设定制动力。
47.根据本发明的一个实施方式的钓鱼用卷线器1,能够简单地进行更详细的制动力的设定,并且能够准确地进行甩竿条件的优化。
48.本发明的一个实施方式的制动力控制系统100构成为具备信息通信装置10,该信息通信装置10具有:上述钓鱼用卷线器1;制动力设定部11,其能够设定卷筒的制动力;以及发送部13,其发送关于设定的制动力的信息。
49.根据本发明的一个实施方式的制动力控制系统100,能够从外部简单地进行更详细的制动力的设定,并且能够准确地进行甩竿条件的优化。
50.本发明的一个实施方式的制动力设定装置101构成为具备:卷筒制动部15,其对该卷筒进行制动;卷筒制动力控制部16,其能够控制该卷筒制动部15的制动力;卷筒的旋转检测部8;投掷开始检测部(未图示);运算部92,其根据投掷开始以后的卷筒的旋转历史运算投掷结果;以及制动力设定部11,其能够设定卷筒的制动力,该制动力设定部11能够显示该投掷结果。在图1的例子中,制动力设定部11设置于外部设备10内,但也可以取而代之地设置于钓鱼用卷线器1。在该情况下,制动力设定装置101能够组装于钓鱼用卷线器1。这样,能够向钓鱼用卷线器追加用于简单地设定制动力的功能。
51.在本发明的一个实施方式的制动力设定装置101中,能够提供能够简单地进行更详细的制动力的设定,并且能够准确地优化甩竿条件的钓鱼用卷线器、制动力控制系统以及制动力设定装置。
52.在本发明的一个实施方式的制动力控制系统100或制动力设定装置101中,构成为卷筒制动力控制部16能够控制制动力的时间变化,所述制动力设定部能够设定制动力的时间变化。
53.在本发明的一个实施方式的制动力控制系统100或制动力设定装置101中,构成为卷筒制动力控制部能够控制与钓线的飞行距离对应的制动力的变化,制动力设定部能够设定与该钓线的飞行距离对应的制动力的变化。
54.本发明的一个实施方式的钓鱼用卷线器1构成为具备:卷筒3,其能够卷绕钓线;卷筒制动部15,其对该卷筒3进行制动;卷筒制动力控制部16,其能够控制该卷筒制动部15的制动力;以及制动力设定部11,其能够设定该卷筒的制动力,该卷筒制动力控制部16构成为根据该制动力设定部11的制动力的设定值设定制动力。其中,图1所示的制动力设定部11设置于钓鱼用卷线器1内。
55.如上所述,制动力控制部16通过在电子设备10上被执行的制动力设定部11而进行制动力的设定。关于电子设备10,考虑智能手机、智能眼镜或智能手表等可穿戴终端、个人计算机等,但并不限于此。
56.接着,参照图3对设定制动力的画面的例子进行说明。图中的曲线图1表示过去(之前)的投掷结果,横轴是从投掷开始起的经过时间,纵轴是卷筒3的旋转速度。另一方面,图
中的曲线图2表示制动力的设定。横轴与曲线图1相同是投掷开始以后的经过时间,纵轴是制动力的设定值。将轴向定义为越向上制动力越高。
57.使用者能够一边观察曲线图1的投掷结果一边设定制动力的经时变化。例如,输入n个(t1~tn)从投掷开始起的经过时间和各自的制动设定(s1~sn)。在图3所示的例子中,通过时间与制动力的四个组合定义制动设定值。
58.在通过发送单元13将该值发送到钓鱼用卷线器1时,制动力控制部16根据该设定值经时地调整对卷筒3的制动力。另外,制动设定值的变更速度有界限,该值由制动部5的特性决定。如图3的曲线图2所示,制动的设定变更根据变更量在tn之前开始。这样,能够设定复杂的制动力条件而无需在钓鱼用卷线器1侧设置输入部、显示部。
59.而且,能够一边显示过去的(尤其是之前的)投掷结果一边设定下一个投掷的制动力条件,由此具有容易地进行制动力条件的优化的优点。参照图4至图5对此进行说明。
60.图4是制动力过大而飞行距离未伸长时的投掷结果和这时的制动条件。图中的曲线图1是卷筒3的旋转速度,实线是之前的投掷结果,虚线是理想的投掷结果。在虚线所示的理想的投掷结果中,通过速度平滑地降低,实现了较长的飞行距离。另一方面,在实线所示的之前的投掷结果中,在a的地点的制动力过强,因此引起急剧的速度降低,其结果,无法实现较长的飞行距离。在这种情况下,通过减弱在a点的制动力,能够成为更接近理想的制动力设定。
61.这样,也可以同时显示理想的投掷结果和之前的投掷结果。由此,容易理解用于更远地飞行的制动设定。作为理想的投掷结果,可以参照类似条件的达到最高距离的过去数据,也可以从在工厂出货时等预先存储的类似条件中选择。
62.接着,图5是制动力过小而产生鱼线缠结时的投掷结果和这时的制动条件。在b点,制动力过弱,因此鱼线的放出速度超过诱饵的速度从而产生鱼线缠结,其结果,无法从卷筒3放出鱼线,从而急剧地失速。在这种情况下,通过增强在b点的制动力,(在解决鱼线缠结之后)能够成为更接近理想的制动力设定。
63.另外,制动力过大还是过小的判断不仅考虑曲线图1,也可以考虑投掷后的鱼线缠结的状态。熟练的使用者通过用手指感受鱼线松弛的产生,由此能够事先感知鱼线缠结的产生。但是,难以准确地抓住该时机。如上所述,通过显示由钓鱼用卷线器1测定的投掷结果,能够准确地掌握鱼线缠结产生的时机。因此,在下一次以后的投掷中,更优化的制动条件的设定变得容易。
64.接着,参照图6对设定制动力的画面的另一例进行说明。图中的曲线图1表示过去(之前)的投掷结果,横轴是从投掷开始起的放出距离,纵轴是卷筒3的旋转速度。另一方面,图中的曲线图2表示制动力的设定。横轴与曲线图1相同,是从投掷开始起的放出时间,纵轴是制动力的设定值。将轴向定义为越向上制动力越高。使用者一边观察曲线图1的投掷结果一边设定制动力的经时变化。
65.在该例中,使用者输入n个(l1~ln)从投掷开始起的放出距离和各自的制动设定(s1~sn)。通过发送部13向钓鱼用卷线器1发送该值时,制动力控制部16根据该设定值调整对卷筒3的制动力。即,在成为指定的飞行距离时成为这时的设定制动力。
66.这样,能够根据从投掷开始起的放出距离依次切换制动设定状态。由此,在例如投掷方向有障碍物,想要在其之前施加制动时等,能够在撞到障碍物之前提高制动力等。而
且,根据放出的钓线的长度,钓线受到的空气阻力改变。通过上述那样根据从投掷距离起的放出距离变更制动设定,能够校正这样的影响。
67.接着,参照图7~图9对显示投掷结果的动作流程进行说明。如图7所示,首先,在步骤s1中,通过检测投掷准备的投掷准备开始检测部检测钓鱼用卷线器1投掷准备是否开始。在投掷准备未开始的情况下,返回步骤s1。
68.在开始投掷准备的情况下,进入步骤s2。在步骤s2中,检测该卷筒3的旋转的旋转检测部5的检测开始,使距离初始化(l=0)。
69.接着,在步骤s3中,确认是否通过检测该卷筒3的旋转的旋转检测部检测到该卷筒的旋转。在检测到旋转的情况下,在使测定值增加规定的距离之后(l=l 1),返回步骤s3。另外,距离l可以是卷筒3的旋转量,也可以是校正了卷筒3的半径变化之后的钓线的放出量。
70.在步骤s3中,在通过检测该卷筒3的旋转的旋转检测部5未检测到该卷筒的旋转的情况下,转移到下一个步骤。在步骤s4中,通过检测投掷结束的投掷结束检测部7检测投掷是否结束。在投掷准备未开始的情况下,返回步骤s3。
71.在投掷结束的情况下,进入步骤s5。在步骤s5中,通过生成从该投掷准备到该投掷结束的历史数据的历史数据生成部8进行历史数据的生成,并进入下一个步骤。
72.在步骤s6中,通过存储部9存储在步骤s5中生成的历史数据,或通过后述的通信处理部向外部发送生成的历史数据。由此,能够向个人计算机或智能手机等、其他卷线器等、外部的设备传递信息,从而能够阅览或记录数据。
73.在这里,对历史数据进行说明。历史数据例如可以是每隔一定时间的距离l的转变,也可以仅是最终的飞行距离l。而且,也可以包含对l进行时间微分而得到的卷筒的速度变化、制动力的经时变化、钓线的最高速度或卷筒的最高转速。进而,通过统计多个投掷,可以记录该每日的投掷历史,也可以记录该卷线器的所有投掷数据。
74.接着,参照图8对本发明的一个实施方式的钓鱼用卷线器1的投掷准备开始状态进行说明。在本发明的一个实施方式的钓鱼用卷线器1中,该投掷准备开始检测部6构成为,在上述步骤s1中,更具体而言,在成为该离合器2成为断开状态的情况(s1a)、从该卷筒3停止的状态开始向该钓线的放出方向的旋转的情况(s1b)、该卷线器成为规定的方向的情况(s1c)、或所述卷线器的规定方向的角速度成为设定阈值以上的情况(s1d),在卷线器设置按钮等输入装置,使用者想要开始投掷准备时对输入装置进行操作的情况(s1e)、的任一状态时,检测投掷准备的开始。这样,通过检测上述任一状态,投掷准备开始检测部6能够准确地检测投掷准备开始。
75.接着,参照图9对本发明的一个实施方式的钓鱼用卷线器1的投掷结束状态进行说明。在本发明的一个实施方式的钓鱼用卷线器1中,该投掷结束检测部7构成为,在成为该离合器2成为接合状态的情况(s4a)、该投掷准备开始的检测后经过了规定时间的情况(s4b)、该卷筒3的旋转成为卷绕方向的情况(s4c)、或该卷筒的旋转速度成为阈值以下的情况(s4d)、在卷线器设置按钮等输入装置,使用者在判断投掷结束时对输入装置进行操作的情况(s4e)、的任一状态时,检测投掷结束。这样,通过检测上述任一状态,投掷结束检测部7能够准确地检测投掷结束。
76.接着,参照图10对本发明的另一实施方式的方式进行说明。本发明的一个实施方
式的钓鱼用卷线器1具有第二制动力设定部20。其他与上述实施方式相同。第二制动力设定部20例如由两个薄膜开关构成,将一个设为 按钮(加按钮),将另一个设为-按钮(减按钮)。另外,第二制动力设定部20的实现方法并不限于此,可以使用能够安装于卷线器主体,使用者能够进行下述操作的公知的单元。
77.如已经叙述的,在使用外部设备10设定制动力之后,能够使用第二制动力设定部20对制动力进行微调整。由此,在设定制动力时,能够进行细致的制动力的设定,而不需要特意更换为使用外部设备10。
78.在一个例子中,存在有通过第二制动力设定部20对由外部设备10或工厂出货时设定的制动力进行补偿的方法。例如,通过外部设备10,制动力被设定为(t1,t2,t3)=(0,100,500)(s1,s2,s3)=(5,12,10)。这时,按下 按钮时,(s1,s2,s3)=(6,13,11),各增加一个。另一方面,按下-按钮时,(s1,s2,s3)=(4,11,9),各减少一个。通过成为这样的方式,在通过外部设备10进行详细的设定之后,能够通过第二制动力设定部20进行微调整。
79.在另一例子中,有通过外部设备10预先设置制作多个制动力的设定值,并使用第二设定单元从该多个设置中选择的方法。例如,设定为
80.模式1:(t1,t2,t3)=(0,100,500)(s1,s2,s3)=(5,12,10)
81.模式2:(t1,t2,t3)=(0,100,600)(s1,s2,s3)=(4,12,10)
82.模式3:(t1,t2,t3)=(0,100,700)(s1,s2,s3)=(3,12,10)
83.模式4:(t1,t2,t3)=(0,100,800)(s1,s2,s3)=(10,15,8)
84.…
85.目前使用模式2。这时,按下 按钮的情况下使用模式3,按下-按钮的情况下使用模式1。通过成为这样的方式,能够通过第二制动力设定单元仅通过手头的操作对设定完成的制动设定值进行微调整。
86.在本说明书中说明的各结构要素的尺寸、材料以及配置不限于在实施方式中明确说明的内容,该各结构要素能够变形为具有能够包含在本发明的范围内的任意的尺寸、材料以及配置。而且,在本说明书中没有明确说明的结构要素可以附加在说明的实施方式中,也可以省略在各实施方式中说明的结构要素的一部分。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。