1.本发明涉及能够进行数据通信的钓鱼用卷线器。
背景技术:
2.以往,作为与外部设备进行通信的卷线器,已知各种方法。作为这样的钓鱼用卷线器,例如,在专利文献1中公开了如下结构:涉及对以电动机作为动力卷绕钓线的钓鱼用电动卷线器进行远程操作的技术,将智能手机、移动电话等作为遥控终端,通过bluetooth(注册商标)、wi-fi(wireless fidelity:无线保真)对钓鱼用电动卷线器进行远程操作。
3.更具体而言,在专利文献1中,公开了钓鱼用电动卷线器的远程系统,该钓鱼用电动卷线器的远程系统通过与通信终端的无线通信对钓鱼用电动卷线器进行远程操作,该通信终端设置有预先以数字仪器用的近距离无线通信标准为基准的、或者/以及与wi-fi对应的无线通信模块,该钓鱼用电动卷线器的远程系统的特征在于,钓鱼用电动卷线器设置有与所述通信终端的所述无线通信模块对应的无线通信模块,所述通信终端安装有通过其用户界面选择控制所述钓鱼用电动卷线器的命令,并且向所述钓鱼用电动卷线器发送该命令的程序,该通信终端和所述钓鱼用电动卷线器在基于所述通信终端的所述程序的启动时,将连接要求信号与该卷线器的设备id一起从所述钓鱼用电动卷线器向所述通信终端发送,在所述通信终端接收到该连接要求信号时,向具有该设备id的钓鱼用电动卷线器发送连接许可信号,由此建立通信协议,然后,彼此发送和接收保持激活信号直至所述程序结束。
4.专利文献1:日本特开2016-073270号公报
5.在投掷诱饵等钓钩组件时,卷筒高速旋转,在对该动作进行检测并且存储时,要求高频率的处理。然而,在想要同时执行这样的处理和与外部设备的通信处理时,存在整体的处理负荷过大的问题。在上述专利文献1中,能够进行卷线器与外部设备之间的通信,但没有任何关于如何进行上述两个处理的公开。
技术实现要素:
6.本发明是鉴于上述情况而完成的,其目的在于提供能够一边尽量降低对检测处理的妨碍一边进行与外部设备的通信处理的钓鱼用卷线器。本发明的除此以外的目的参照本说明书整体即可明确。
7.本发明的一个实施方式的钓鱼用卷线器构成为具备:卷筒,其能够卷绕钓线;检测部,其能够检测该卷筒的旋转量;存储部,其存储该卷筒的旋转量作为检测结果;以及发送部,其向外部发送该检测结果,其中,在作为该检测结果的该卷筒的旋转量为第一阈值以上的情况下,选择投掷模式,在作为该检测结果的该卷筒的旋转量不足第一阈值的情况下,选择下落模式。
8.本发明的一个实施方式的钓鱼用卷线器构成为,在作为该检测结果的该卷筒的旋转量为第一阈值以上的情况下,选择投掷模式,然后,在作为该检测结果的该卷筒的旋转量变为不足第一阈值的情况下,转移为下落模式。
9.在本发明的一个实施方式的钓鱼用卷线器中,该投掷模式是不能从该发送部向外部进行发送的状态。
10.在本发明的一个实施方式的钓鱼用卷线器中,该下落模式是能够从该发送部向外部进行发送的状态。
11.在本发明的一个实施方式的钓鱼用卷线器中,该存储单元每经过规定的采样时间存储检测结果,该投掷模式下的采样时间比该下落模式下的采样时间短。
12.本发明的一个实施方式的钓鱼用卷线器的模式管理系统构成为具备:上述任意一项的钓鱼用卷线器;以及信息处理装置,其具有接收该检测结果的接收部和输出该检测结果的输出部。
13.在本发明的一个实施方式的钓鱼用卷线器的模式管理系统中,构成为该信息处理装置具备显示该检测结果的显示部。
14.在本发明的一个实施方式的钓鱼用卷线器的模式管理系统中,该信息处理装置是能够携带的装置。
15.根据上述实施方式,能够在处理负荷较低的时机进行与外部设备的通信处理,由此准确并且可靠地进行投掷时的检测和存储处理以及与外部设备的通信处理。
附图说明
16.图1是示出本发明的一个实施方式的钓鱼用诱饵的投掷时的投掷步骤的概要的图。
17.图2是示出本发明的一个实施方式的钓鱼用诱饵的钓钩组件下落的步骤的图。
18.图3是示出从本发明的一个实施方式的钓鱼用卷线器放出的钓线的放出速度的推移的图。
19.图4是对本发明的一个实施方式的钓鱼用卷线器进行说明的图。
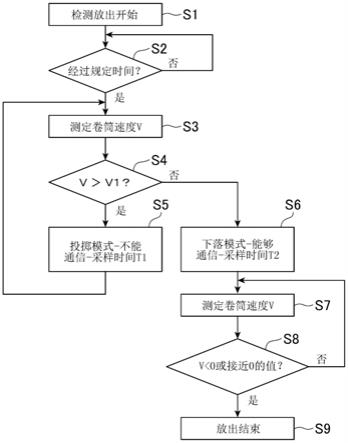
20.图5是对本发明的一个实施方式的钓鱼用卷线器的模式判定流程进行说明的图。
21.图6是对本发明的一个实施方式的钓鱼用卷线器的卷筒转速的检测进行说明的图。
22.图7是示出本发明的一个实施方式的钓鱼用卷线器的卷筒旋转时得到的信号的图。
23.标号说明
24.1:钓鱼用卷线器;2:离合器;3:卷筒;4:操作部;5:旋转检测部;6:投掷准备开始检测部;7:投掷结束检测部;8:历史数据生成部;9:存储部;10:历史数据;11:卷筒的旋转量;12:对卷筒的制动力的经时变化;13:钓线的到达距离;14:钓线的最高速度;15:每天的投掷历史;16:卷线器的使用历史;17:制动力控制单元;18:钓线回收检测部;19:输出部;20:发送部;21:接收单元;22:输出部;23:信息处理装置;24:显示部。
具体实施方式
25.以下,参照附图对本发明的实施方式具体进行说明。对在多个附图中共同的构成要素在该多个附图中赋予相同的参照标号。需要注意的是,为了便于说明,各附图未必以准确的比例尺记载。
26.使用包含本卷线器的通常的卷线器的代表性的使用方法主要能够大致分为沿水平方向放出钓钩组件的投掷和沿铅直方向放出钓钩组件的下落这两种。
27.首先,参照图1对使用包含本卷线器的通常的卷线器,投掷诱饵等渔具的情况的步骤的一例进行说明。另外,投掷通常在想要将诱饵、钓钩等钓钩组件送到水平方向远方的对象鱼时使用。
28.首先,如图1的(a)所示,通过卷线器1将诱饵20调整为距离钓竿10的鱼竿前端规定的长度,并断开卷线器1的离合器2(未图示),成为卷筒自由状态。这时,用拇指按住卷线器1的卷筒3,以使钓线不会因诱饵20的自重等而放出。
29.接着,如图1的(b)~图1的(d)所示,通过挥出钓竿10,给予诱饵20初速度。然后,如图1(e)所示,在诱饵的速度和放出方向适当的时机,使拇指离开卷筒3,则能够投掷诱饵20。
30.进而,如图1的(g)所示,在投掷后,诱饵20受到来自钓线的张力、空气阻力而开始减速。另一方面,卷筒3利用来自钓线的张力开始反向旋转。钓线的放出速度与诱饵20的飞行速度一致时,卷筒3成为最高转速,钓线失去张力。诱饵20在这之后也因空气阻力等而继续失速。这时,卷筒3通过惯性而继续高速旋转时,钓线的放出速度大于诱饵20的飞行速度。
31.由此,钓线被多余地放出,从而在绕线轮1内产生鱼线缠结。为了避免这种情况,能够通过钓鱼用卷线器5对卷筒3施加规定的制动力。而且,根据飞行中的速度变化,能够判断制动力是否适当。因此,通过对该速度变化进行测定并记录,能够实现投掷条件的优化。
32.接着,参照图2对钓钩组件下落(dropping)进行说明。在这里,钓钩组件下落(dropping)通常在从船钓或具有水深的岸壁向栖息在水底附近的对象鱼送出诱饵、钓钩等钓钩组件时使用。
33.首先,使用者在对卷线器1进行操作,从而将钓钩前端拉到手边的状态下,根据需要进行将钓饵挂在钓钩上、将鱼饵塞满鱼饵笼、或更换诱饵20等准备。接着,该准备结束后,断开离合器,使卷筒3成为自由状态,并用拇指按住卷筒3。然后,在将配重、诱饵20朝向水面送出之后,使拇指离开卷筒3,钓钩组件利用配重的重力而下落。
34.接着,钓钩组件到达底部时,下落停止。从这时起连接离合器,并根据需要重新卷绕钓线,等待鱼咬饵。在一些情况下,也能够在到达底部之前连接离合器,并从中间位置起卷绕诱饵等。然后,在检测到鱼咬钩或经过一定时间之后,操作卷线器1并回收钓钩组件。
35.根据鱼种类、钓法,上述钓钩组件下落速度、卷绕速度不同,因此考虑钓鱼成果存在差异。因此,通过对这些速度进行测定,并记录该速度历史,能够实现钓鱼成果的提高。
36.接着,参照图3,在上述投掷和钓钩组件下落时,比较钓线的放出速度。在图3中,横轴表示从放出开始起的经过时间,纵轴表示鱼线的放出速度,实线是下落时的代表性的数据,虚线是投掷时的代表性的数据。
37.在投掷中,例如,在使用钓黑鲈鱼时经常使用的一般的器械的情况下,投掷时的初速度为约55m/s(约200km/h),末速度为10m/s左右。而且,到着水为止的持续时间最长为5秒左右,鱼线的放出量为10m~100m左右。
38.另一方面,在(钓钩组件)下落时,受到水的粘滞阻力,因此与在空气中飞行的投掷相比速度较慢。可能根据水深、配重的重量、鱼线的粗细等变化,但最快为4m/s左右,与投掷中相比约为1/10。而且,与在空气中移动的投掷中相比,下落中的速度变化也较小。
39.到达底部为止的持续时间根据水深、钓钩组件而有很大差异,在较长的情况下有
时也花费数分钟,存在比投掷时更长的倾向。鱼线的放出量到水深的1.5倍左右,根据地形、对象鱼而有所不同,但在经常使用的条件下,大多为10m~200m左右,与投掷的情况为相同程度。
40.另外,在实际的钓鱼中,也有在沿水平方向投掷之后,钓钩组件沉到具有水深的海底这种双方的要素都具有的情况,在该情况下,在空气中飞行的投掷之后,转移到在水中沉没的下落,这样变化为两个阶段,从而能够根据鱼线的放出速度区别是哪一个阶段。
41.也存在设想大致仅下落的使用方法的电动卷线器等在一部分卷线器中仅设想其中一方的使用方法的卷线器,使用下落、投掷中的哪一种情况根据钓法、使用者而不同,从而也考虑根据卷线器的种类在双方的情况使用相同的卷线器的情况。
42.接着,参照图4对本发明的一个实施方式的钓鱼用卷线器进行说明。如图所示,本发明的一个实施方式的钓鱼用卷线器1构成为具备:卷筒3,其卷绕钓线;操作部4,其对该卷筒3进行旋转操作;离合器2,其切换该操作部与该卷筒的动力能否传递;旋转检测部5,其检测该卷筒3的旋转;投掷准备开始检测部6,其检测投掷准备;投掷结束检测部7,其检测投掷结束;历史数据生成部8,其生成从该投掷准备到该投掷结束的历史数据;以及存储部9,其存储该历史数据。另外,它们之中的一部分可以在钓鱼用卷线器的外部,而且,也可以在外部的信息通信终端设置接收部,从存储部9接收历史数据。而且,也可以在接收历史数据之后,在外部的信息通信终端的输出部或显示部进行输出或显示。在这种情况下,与钓鱼用卷线器一起称为钓鱼用卷线器的模式管理系统。
43.在这里,卷筒3被轴支承为能够相对于钓鱼用卷线器1旋转,并能够通过正向旋转卷绕钓线,通过反向旋转放出卷绕的钓线。操作部4例如构成为手柄,通过齿轮等传递机构将使用者的旋转操作传递到卷筒3,从而能够使该卷筒3正向旋转。另外,操作部4也可以是杆等操作部件与电动机等动力源的组合。
44.离合器2能够在可向卷筒3传递动力的接合状态和不进行动力传递的断开状态之间切换。在接合状态下,能够通过操作部件3将卷筒3操作为正向旋转,在断开状态下,无论操作部件3的状态如何,都能够向正反方向旋转(卷筒自由状态)。
45.另外,旋转检测部5可以由光电断路器等检测单元和设置在卷筒3上的遮光板等被检测单元的组合构成。由此,能够将卷筒3的旋转转换为电信号。另外,检测单元和被检测单元的组合不限于上述例子,可以利用磁铁和磁传感器等公知的单元。
46.接着,参照图5对在本发明的一个实施方式的钓鱼用卷线器1中,从检测到卷筒的放出开始到进行投掷或下落的判别的顺序进行说明。
47.如图所示,首先,在步骤1中,检测来自卷筒3的钓线的放出开始。放出开始的检测例如有在使离合器2成为切断状态之后,检测到卷筒3的旋转开始的情况。此外,也可以是检测在线长成为规定值以下(例如距离鱼竿前端1m以下)之后,再次成为规定值以上的情况、卷筒3的旋转速度成为规定值以上的情况。
48.接着,在步骤2中,等待经过规定时间(例如,100ms),并检测当时的卷筒转速。等待规定时间的经过是因为由于鱼线的放出后卷筒3暂时继续加速,实际上难以判断是投掷还是(钓钩组件)下落。
49.如前所述,在投掷和下落中,卷筒转速差异较大,因此在经过规定时间后,在步骤3~4中,设定第一阈值v1(例如,5000rpm),在卷筒速度为其以上的情况下,如步骤5那样设定
投掷模式。在本发明的一个实施方式的钓鱼用卷线器1中,在设定为投掷模式的情况下,不能与外部进行通信。而且,将采样时间设定为t1,每隔t1ms对卷筒3的转速进行测定和记录。每次都进行与第一阈值v1的速度比较,并在成为v1以下时转移到(钓钩组件)下落模式。
50.诱饵等投掷对象物在着水后受到水的阻力,如上所述那样,卷筒转速下降很多,从而成为阈值v1以下。检测到该情况后,如步骤6那样转移到下落模式。在本发明的一个实施方式的钓鱼用卷线器1中,在设定为下落模式的情况下,能够与外部进行通信。而且,将对卷筒3的转速进行测定和记录的采样时间设定为比t1长的t2。
51.接着,在步骤7中,每隔t2ms对卷筒的转速进行测定和记录。另外,一旦转移到下落模式,在通常的卷线器的使用方法中,卷筒3的转速不会被再次加速。因此,实际上也可以不考虑从下落模式转移到投掷模式的情况。
52.在转移到下落模式之后,在步骤8中,进行卷筒3的转速与第二阈值v2(例如,200rpm)的比较。检测到卷筒3的转速为v2以下时,在步骤9中,判断为钓线的放出结束。另外,在水深较浅的场所钓鱼的情况下等,在不需要下落模式的情况下,第一阈值与第二阈值也可以相同。由此,能够根据投掷模式直接检测放出结束。
53.如上所述,在本发明的一个实施方式的钓鱼用卷线器1中,在投掷模式中,以t1进行卷筒3的速度测量和数据保存的采样时间,在下落模式中,以比t1长的t2进行卷筒3的速度测量和数据保存的采样时间。由此,能够在各个情况下进行采样时间的优化。
54.在投掷时,卷筒3的旋转速度也较大,因此也可能有较大的速度变化。因此,为了准确地记录该现象,需要以较高的频率记录数据。例如,在想要在钓线每移动1m时记录卷筒3的速度的情况下,投掷时与下落时相比,需要以10倍以上的频率(1/10以下的采样时间)进行记录。
55.另一方面,在下落时,速度、速度变化比投掷时小,但持续时间可能变长。因此,如果以与投掷时相同的采样时间对数据进行记录和保存,处理负荷会过度增加,从而产生存储容量增加等弊端。尤其是,下落模式的持续时间可能如上所述是投掷模式的几倍。因此,以相同的采样时间进行记录时,记录容量也成为数倍,从而在需要对该信息进行通信时,导致通信时间的增大。在这样的情况下,通过使下落模式的采样时间比投掷模式长,也能够避免上述弊端。
56.本发明的一个实施方式的钓鱼用卷线器1构成为具备:卷筒3,其能够卷绕钓线;检测部5,其能够检测该卷筒3的旋转量;存储部9,其存储该卷筒的旋转量作为检测结果;以及发送部20,其向外部发送该检测结果,在作为该检测结果的该卷筒的旋转量为第一阈值以上的情况下,选择投掷模式,在作为该检测结果的该卷筒的旋转量不足第一阈值的情况下,选择下落模式。
57.根据本发明的一个实施方式的钓鱼用卷线器1,能够在处理负荷较低的时机进行与外部设备的通信处理,由此准确并且可靠地进行投掷时的检测和存储处理以及与外部设备的通信处理。
58.本发明的一个实施方式的钓鱼用卷线器1构成为,在作为该检测结果的该卷筒3的旋转量为第一阈值以上的情况下,选择投掷模式,然后,在作为该检测结果的该卷筒的旋转量不足第一阈值的情况下,转移为下落模式。
59.根据本发明的一个实施方式的钓鱼用卷线器1,能够在处理负荷较低的时机进行
与外部设备的通信处理,由此准确并且可靠地进行投掷时的检测和存储处理以及与外部设备的通信处理。
60.在本发明的一个实施方式的钓鱼用卷线器中,该投掷模式是不能从该发送部向外部进行发送的状态。而且,在本发明的一个实施方式的钓鱼用卷线器中,该下落模式是能够从该发送部向外部进行发送的状态。
61.在本发明的一个实施方式的钓鱼用卷线器中,该存储单元每隔规定的采样时间存储检测结果,该投掷模式下的采样时间比该下落模式下的采样时间短。
62.接着,参照图6和7,对检测卷筒的转速的情况的带给该检测的影响进行说明。在图示的例子中,作为旋转检测部5,使用所谓的增量式的旋转编码器,但并不限于此。旋转检测部5由第一检测部51a、第二检测部51b以及被检测部52构成。第一检测部51a、第二检测部51b能够使用光电断路器,但并不限于此。能够通过遮光物是否进入在传感器内对置配置的发光部与受光部之间而产生电信号。
63.作为被检测部52,使用每隔180/n
°
(在图示的例中为45
°
)均匀地配置环状的n个(在图示的例中为4个)遮光板而得到的脉冲板。这时,第一检测部51a与第二检测部51b的间隔张开90/n
°
(在图示的例中为22.5
°
)。旋转检测部5不限于上述例子,为了避免滑动摩擦的产生,优选为非接触式。除了光电断路器之外,也可以是反射式的光传感器、磁传感器等。在该情况下,被检测部能够使用反射板、磁铁等与检测方式对应的部件。
64.卷筒3旋转一圈时,通过上述结构得到图7所示的信号。即,从第一检测部51a得到的信号(a相)和从第二检测部51b得到的信号(b相)分别都在每旋转180/n
°
(45
°
)旋转时切换h和l,a相与b相偏差90/n
°
(22.5度)。能够通过a相与b相的关系判断旋转方向,从而能够检测卷筒3每旋转90/n
°
(22.5
°
)的情况。
65.接着,考虑在卷筒3的高速旋转中进行通信处理的情况。卷筒以ω(
°
/秒)旋转时,卷筒3旋转90/n
°
花费90/ωn秒。在该时间内,如果微型计算机无法检测a相和b相的状态,则跳过卷筒3的旋转。
66.而且,在进行与外部的数据通信时,通常微型计算机大多间歇性地进行数据通信的处理。设该处理时间为tc秒。在成为tc>90/ωn的情况下,需要同时进行数据通信处理和卷筒旋转检测处理,从而进行单任务处理的微型计算机难以进行处理。
67.作为投掷的具体例,考虑投掷物的速度v(m/s)、卷筒直径d(m)=35/1000m、遮光板个数n=4、通信处理时间tc:1ms的情况。卷筒3旋转90/n
°
所需的时间为1000πd/4vnms。必须在该时间内结束通信处理,因此tc<100πd/4vn,v<1000πd<4tcn。代入上述条件时,投掷物的速度v为6.87m/s以上时,卷筒旋转检测处理和通信处理同时产生。
68.将下落和投掷的阈值v1设为该值以下的情况下,通过在投掷中停止通信处理,能够避免处理的同时产生。成为在下落时能够同时进行处理的速度以下,因此即使能够进行通信处理,也能够进行卷筒的旋转检测。由此,能够缩小与外部设备进行通信的时滞。另外,上述速度根据卷筒直径d、遮光板个数n、通信处理时间tc而改变,因此在一些情况下,也可以在下落模式时也使通信处理不能进行。
69.在本说明书中说明的各结构要素的尺寸、材料以及配置不限于在实施方式中明确说明的内容,该各结构要素能够变形为具有能够包含在本发明的范围内的任意的尺寸、材料以及配置。而且,在本说明书中没有明确说明的结构要素可以附加在说明的实施方式中,
也可以省略在各实施方式中说明的结构要素的一部分。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
