技术特征:
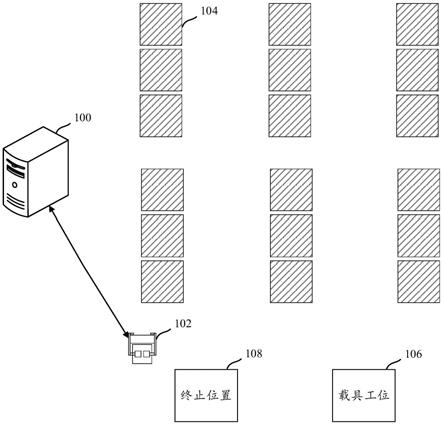
1.一种路径规划系统,其特征在于,所述系统包括:控制中心和搬运设备;所述控制中心确定所述搬运设备执行拣选任务所需要到达的目的地,所述目的地包括库存容器所在位置、所述搬运设备执行所述拣选任务的起始位置以及终止位置,所述库存容器中容纳有所述拣选任务需要拾取的待拣选库存货物;所述控制中心针对各目的地,至少部分地根据预存的地图信息,分别确定所述搬运设备从该目的地到达其他目的地的路径权重,并构建以各目的地为顶点,以各目的地之间的路径权重为边的完全图;所述控制中心至少部分地根据所述起始位置、所述终止位置以及所述完全图,规划所述搬运设备的行驶路径,并将所述拣选任务以及所述行驶路径发送至所述搬运设备;所述搬运设备接收所述控制中心发送的所述拣选任务以及行驶路径,并在执行所述拣选任务的过程中,按照所述行驶路径行驶。2.如权利要求1所述的系统,其特征在于,所述控制中心确定所述搬运设备执行所述拣选任务时所需要处理的各待拣选订单,至少部分地根据各待拣选订单的信息,确定所述搬运设备执行所述拣选任务所需要到达的至少一个库存容器所在位置。3.如权利要求2所述的系统,其特征在于,所述控制中心确定库存货物的信息与容纳库存货物的库存容器的信息之间的对应关系作为第一对应关系,并且,确定库存容器的信息与库存容器所在位置的信息之间的对应关系,作为第二对应关系;针对各待拣选订单中的待拣选库存货物,至少部分地根据该待拣选库存货物的信息以及所述第一对应关系,确定容纳有该待拣选库存货物的库存容器的信息,至少部分地根据容纳有该待拣选库存货物的库存容器的信息以及所述第二对应关系,确定容纳有该待拣选库存货物的库存容器所在位置的信息;至少部分地根据各容纳有待拣选库存货物的库存容器所在位置的信息,确定所述搬运设备执行所述拣选任务所需要到达的库存容器所在位置。4.如权利要求3所述的系统,其特征在于,所述控制中心至少部分地根据各容纳待拣选库存货物的库存容器所在位置的信息,对各容纳待拣选库存货物的库存容器所在位置进行合并处理,得到所述搬运设备执行所述拣选任务所需要到达的库存容器所在位置。5.如权利要求2所述的系统,其特征在于,所述控制中心至少部分地根据所述搬运设备的信息以及各待拣选订单的信息,判断所述搬运设备在执行所述拣选任务的过程中是否需要加载指定载具,若是,则确定放置所述指定载具的工位所在的位置,作为所述起始位置,否则,获取所述搬运设备的当前位置,将所述当前位置作为所述起始位置。6.如权利要求2所述的系统,其特征在于,所述控制中心至少部分地根据各待拣选订单的信息,确定放置各待选库存货物的位置,作为所述终止位置信息。7.一种路径规划方法,其特征在于,所述方法包括:确定搬运设备执行拣选任务所需要到达的目的地,所述目的地包括库存容器所在位置、所述搬运设备执行所述拣选任务的起始位置以及终止位置,所述库存容器中容纳有所述拣选任务需要拾取的待拣选库存货物;针对各目的地,至少部分地根据预存的地图信息,分别确定所述搬运设备从该目的地到达其他目的地的路径权重,并构建以各目的地为顶点,以各目的地之间的路径权重为边的完全图;
至少部分地根据所述起始位置、所述终止位置以及所述完全图,规划所述搬运设备的行驶路径;将所述拣选任务以及所述行驶路径发送至所述搬运设备,以使所述搬运设备在执行所述拣选任务的过程中,按照所述行驶路径行驶。8.一种路径规划装置,其特征在于,所述装置包括:确定目的地模块,用于确定搬运设备执行拣选任务所需要到达的目的地,所述目的地包括库存容器所在位置、所述搬运设备执行所述拣选任务的起始位置以及终止位置,所述库存容器中容纳有所述拣选任务需要拾取的待拣选库存货物;确定路径权重模块,用于确定搬运设备执行拣选任务所需要到达的目的地,所述目的地包括库存容器所在位置、所述搬运设备执行所述拣选任务的起始位置以及终止位置,所述库存容器中容纳有所述拣选任务需要拾取的待拣选库存货物;确定行驶路径模块,用于至少部分地根据所述起始位置、所述终止位置以及所述完全图,规划所述搬运设备的行驶路径;发送行驶路径模块,用于将所述拣选任务以及所述行驶路径发送至所述搬运设备,以使所述搬运设备在执行所述拣选任务的过程中,按照所述行驶路径行驶。9.一种电子设备,其特征在于,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如权利要求7所述的路径规划方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求7所述的路径规划方法。
技术总结
本说明书公开了路径规划系统、方法及装置,通过确定搬运设备执行拣选任务所需要到达的目的地,针对各目的地,至少部分地根据预存的地图信息,分别确定搬运设备从该目的地到达其他目的地的路径权重,并构建以各目的地为顶点,以各目的地之间的路径权重为边的完全图,至少部分地根据起始位置、终止位置以及完全图,规划搬运设备的行驶路径。本说明书对搬运设备在执行拣选任务的整个过程中进行了全局路径规划,搬运设备按照行驶路径行驶以执行拣选任务时,可避免出现绕路等情况,提高搬运设备执行拣选任务的效率。备执行拣选任务的效率。备执行拣选任务的效率。
技术研发人员:李峰
受保护的技术使用者:北京极智嘉科技股份有限公司
技术研发日:2020.08.27
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。