1.本发明涉及显微镜测距技术领域,具体涉及一种显微镜的锁焦探测系统和方法。
背景技术:
2.锁焦是锁定显微镜的物镜和样品之间的距离,也就是物镜的焦面。锁焦系统包括两部分:一个是探测器,用于实时探测样品和物镜的距离;一个是精密位移器。因为一般物镜和样品位移量在20~50nm,所以需要一种精密的探测器,能够探测到20nm或者更小的值。因此,锁焦探测器最重要的技术点在于将20nm放大到可以探测的程度。现有的探测器系统存在如下缺点:
3.1、现有的方案利用的是显微镜的横向放大倍率,现有的显微镜自身放大倍率为100x,再通过光路增加约2倍的放大倍率,总的放大倍率为200x左右,无法做到更加精密的探测。
4.2、在锁焦探测器模组中,因为受限于尺寸,无法做到放大更大的倍率,为了增大放大倍率,需要更加复杂的系统。
技术实现要素:
5.本发明的目的是为了克服以上现有技术存在的不足,提供了一种精确测量物镜和样品之间距离的变化量的显微镜的锁焦探测系统和方法。
6.本发明的目的通过以下的技术方案实现:
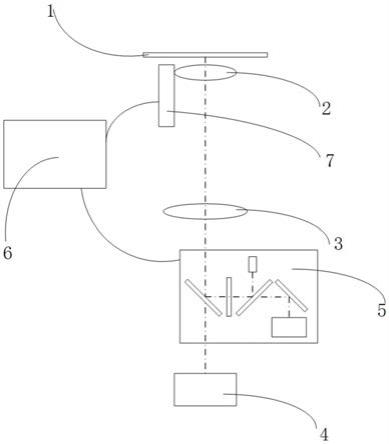
7.一种显微镜的锁焦探测系统,包括:物镜、管镜、锁焦探测模组、锁焦控制器、z轴位移器和成像ccd;z轴位移器设置在物镜的侧边;物镜在样品的正下方,管镜在物镜的正下方,成像ccd在管镜的正下方,锁焦探测模组在管镜和成像ccd的之间,锁焦探测模组、锁焦控制器、z轴位移器依次连接。
8.优选地,锁焦探测模组包括:第一分光镜片、四分之一波片、第二分光镜片、光源、第三分光镜片和线性探测器;第一分光镜片倾斜设置在管镜的正下方,第一分光镜片、四分之一波片、第二分光镜片和第三分光镜片依次水平设置,第一分光镜片的左面和第二分光镜片的左面相对称,第二分光镜片的右面和第三分光镜片的左面相对称,光源设置在第二分光镜片的左面的正上方,线性探测器设置在第三分光镜片的左面的正上方。
9.优选地,锁焦探测模组还包括:准直透镜;准直透镜设置在第一分光镜片和四分之一波片之间,且准直透镜、第一分光镜片和四分之一波片在同一水平光轴。
10.优选地,第二分光镜片为偏振分光片;第三分光镜片的左面镀有透射p态偏振光、反射s态偏振的偏振膜膜,第三分光镜片的右面镀有全反射膜;第一分光镜片的左面镀有反射红外光、透射可见光的膜。
11.一种显微镜的锁焦探测方法,包括:锁焦探测模组探测物镜和样品之间距离的变化量,并将距离的变化量发送至锁焦控制器,锁焦控制器输出移动距离至z轴位移器,z轴位移器移动距离带动物镜1进行移动,将物镜和样品的间距保持在预设的焦距值内。
12.优选地,锁焦探测模组探测物镜和样品之间距离的变化量包括:红外探测光经过第三分光镜左面后,一部分光反射到探测器,将此时反射到探测器的这部分光路记为第一光路;另一部分光透过第三分光镜的左面,经过第三分光镜的右面反射,再入射到第三分光镜的左面,一部分光会再次透射出第三分光镜左面,然后入射到探测器,将此时反射到探测器的这部分光路记为第二光路;另一部分光经过第三分光镜的左面反射到第三分光镜的右面,再经过第三分光镜的右面反射后,再有一部分光透射出第三分光镜的左面,将此时反射到探测器的这部分光路记为第三光路;依次类推,依次会有n个光路入射到第三分光镜,探测器探测出不同次数入射到探测器的光的横向位置及其对应的光强,通过查表图lut计算得到探测器上移动位置,n≥3。
13.优选地,红外探测光经过第三分光镜左面之前还包括:光源输出线偏振光,经过第二分光镜片反射至四分之一波片,经过四分之一波片后变成圆偏振光,圆偏振光经过第一分光镜片反射,反射后的光依次经过管镜和物镜后入射到样品上;样品反射的光依次经过物镜和管镜后入射第一分光镜片;依次经过第一分光镜片反射、四分之一波片投射后变成p态偏振光,p态偏振光为红外探测光。
14.一种锁焦探测方法,还包括:经过四分之一波片后的圆偏振光入射准直透镜,经过准直透镜后变成平行光,平行光入射第一分光镜片;样品反射的光经过分光镜片反射后入射准直透镜,经过准直透镜后变成聚焦光,聚焦光入射第一分光镜片。
15.优选地,第三分光镜片的左面的反射率为r1,透过率为t1,右面的反射率为r2,第三分光镜片的厚度为d,折射率为n,入射角度为45
°
;初始入射到第三分光镜片的光强为i0;
16.入射到线性探测器的第一光路:光强i1’=i1*r1,位置为l1,l1为初始位置;
17.入射到线性探测器的第二光路:光强i2’=i2*t12*r2,位置l2=l1 d/n;
18.入射到线性探测器的第三光路:光强i3’=i3*t12*r*r1,位置l3=l1 2d/n;
19.入射到线性探测器的第四光路:光强i4’=i4*t12*r23*r12,位置l4=l1 3d/n;
20.入射到线性探测器的第五光路505:光强i5’=i5*t12*r23*r12,位置l4=l1 3d/n;
21.其中i1、i2、i3、i4和i5分别为真实情况下的轴向位置l1、l2、l3、l4、l5对应的光强,i1、i2、i3、i4和i5通过下式求得:
[0022][0023]
一种锁焦探测方法,其特征在于,包括:
[0024]
光源关闭,探测器测量出背景bm,标定探测器的噪声;
[0025]
对标准样品进行成像,确定光强的左边界;假设左边界为探测上的第m列,其中入射到线性探测器的不同光路分布在不同列;重构出衰减比例和位置关系查表图lut,查表图lut的像素数目和ccd的像素数目一致查表图的设定如下:
[0026]
(1)初始设定lut的每个值为0;
[0027]
(2)从左边界位置开始,然后到第m n列的值为1,其中n=[d/n/pixelsize],pixelsize为探测器的像素尺寸,[]为取整函数;
[0028]
(3)从第m n到m 2n列的值为r1/(t1*r2*t1)
[0029]
(4)从第m 2n到m 3n列的值为r1/(t1*r2*t1*r1*r2)
[0030]
(5)一次到从m kn到m (k 1)n列的值为r1/(t1*r2*t1*r1
k-2
*r2
k-2
);
[0031]
当定位准样品的成像面后,将该处标定为基准位置,测量出探测器上的光强图im0,通过如下公式得到新的重构图像im0’:
[0032]
im0’=(im0-bm).*lut
[0033]
其中.*为点乘函数,即将两个图像按照对应位置的值进行相乘;
[0034]
计算出im0’的质心列位置为n0列;
[0035]
当样品和物镜的距离产生漂移后,在探测上成像为im1,并计算出重构图像im1’[0036]
im1’=(im1-bm).*lut
[0037]
计算im1’列的质心列位置为n1列;
[0038]
通过如下公式计算得到探测器上移动位置:
[0039]
d=(n1-n0)*pixel,
[0040]
其中当d为正值时表示光斑往右移动,将拉远样品和物镜的距离d/β2,当d为负值是表示光斑往左移动,将拉近样品和物镜的距离-d/β2,其中β值为系统的放大倍率。
[0041]
本发明相对于现有技术具有如下优点:
[0042]
本发明的锁焦探测模组探测物镜和样品之间距离的变化量,并将距离的变化量发送至锁焦控制器,锁焦控制器输出移动距离至z轴位移器,z轴位移器移动距离带动物镜进行移动,将物镜和样品的间距保持在预设的焦距值内。而锁焦探测模组探测物镜和样品之间距离的变化量的过程通过探测器探测出不同次数入射到探测器的光的横向位置及其对应的光强,通过查表图lut计算得到探测器上移动位置,这种探测方法抛开横向放大率作为光学尺寸的放大,采用轴向放大率作为光学放大率,将轴向放大率测量出来,轴向放大率会正比于横向放大率的平方,做到更加精密的探测。
附图说明
[0043]
构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0044]
图1为实施例1的显微镜的锁焦探测系统的结构图。
[0045]
图2为实施例1的锁焦探测模组的结构图。
[0046]
图3为实施例1的第三分光镜片和线性探测器的光路图。
[0047]
图4为实施例2的锁焦探测模组的结构图。
具体实施方式
[0048]
下面结合附图和实施例对本发明作进一步说明。
[0049]
实施例1
[0050]
参见图1-3、一种显微镜的锁焦探测系统,包括:物镜2、管镜3、锁焦探测模组5、锁焦控制器6、z轴位移器7和成像ccd4;z轴位移器7设置在物镜2的侧边;物镜2在样品1的正下方,管镜3在物镜2的正下方,成像ccd4在管镜3的正下方,锁焦探测模组5在管镜3和成像ccd4的之间,锁焦探测模组5、锁焦控制器6、z轴位移器7依次连接。
[0051]
在本实施例,锁焦探测模组5包括:第一分光镜片51、四分之一波片52、第二分光镜
片53、光源54、第三分光镜片55和线性探测器56;第一分光镜片51倾斜设置在管镜3的正下方,第一分光镜片51、四分之一波片52、第二分光镜片53和第三分光镜片55依次水平设置,第一分光镜片51的左面和第二分光镜片53的左面相对称,第二分光镜片53的右面和第三分光镜片55的左面相对称,光源54设置在第二分光镜片53的左面的正上方,线性探测器56设置在第三分光镜片55的左面的正上方。
[0052]
在本实施例,第二分光镜片53为偏振分光片。第三分光镜片55的左面镀有透射p态偏振光、反射s态偏振的偏振膜,第三分光镜片55的右面镀有全反射膜。第一分光镜片51的左面镀有反射红外光、透射可见光的膜。第一分光镜片51可以将显微镜分光,然后进行操作。光源54的出光为线偏振光。
[0053]
显微镜的光路如下:样品1的光经过物镜2之后变成平行光,然后经过管镜3后聚焦到成像ccd4的上。
[0054]
上述显微镜的锁焦探测系统适用的一种显微镜的锁焦探测方法,包括:锁焦探测模组5探测物镜2和样品1之间距离的变化量,并将距离的变化量发送至锁焦控制器6,锁焦控制器6输出移动距离至z轴位移器7,z轴位移器7移动距离带动物镜21进行移动,将物镜2和样品1的间距保持在预设的焦距值内。
[0055]
在本实施例,锁焦探测模组5探测物镜2和样品1之间距离的变化量包括:光源54输出线偏振光,经过第二分光镜片53反射至四分之一波片,经过四分之一波片后变成圆偏振光,圆偏振光经过第一分光镜片51反射,反射后的光依次经过管镜3和物镜2后入射到样品1上;样品1反射的光依次经过物镜2和管镜3后入射第一分光镜片51;依次经过第一分光镜片51反射、四分之一波片投射后变成p态偏振光,p态偏振光为红外探测光。红外探测光经过第三分光镜左面后,一部分光反射到探测器56,将此时反射到探测器56的这部分光路记为第一光路;另一部分光透过第三分光镜的左面,经过第三分光镜的右面反射,再入射到第三分光镜的左面,一部分光会再次透射出第三分光镜左面,然后入射到探测器56,将此时反射到探测器56的这部分光路记为第二光路;另一部分光经过第三分光镜的左面反射到第三分光镜的右面,再经过第三分光镜的右面反射后,再有一部分光透射出第三分光镜的左面,将此时反射到探测器56的这部分光路记为第三光路;依次类推,依次会有n个光入射到第三分光镜;探测器56探测出不同次数入射到探测器56的光的横向位置及其对应的光强,通过查表图lut计算得到探测器56上移动位置,n≥3。
[0056]
轴向位置的区别在于聚焦点的不同,也就是光强密度的不同,即单位面积的光强不一样,这样可以通过在探测器56上的光强来表征光强。虽然轴向另一个特点是测量的光斑尺寸会不一样,聚焦点的光斑尺寸更小,但是实际测量中不容易测量光斑尺寸,所以不采用光斑尺寸测量来定位聚焦点。
[0057]
线性探测器56在探测过程中,不同位置的能量衰减不同,不同位置的光强按照r1*r2的程度衰减(r1*r2的值约为0.5),下面介绍一种怎么测量不同位置的光强的值。
[0058]
因为采用了轴向放大的方案探测,探测精度为横向放大率的平方,以100倍的放大率为例,轴向的放大率为10000倍,同时由于增加了第三分光镜,因为第三分光镜的存在导致了放大倍率降低为原来的1/n≈1/1.5=2/3,那样整体的放大倍率为6666倍左右。因为第三分光镜的存在,不能探测到所有的位置,即探测到的位置不是连续的,探测步进为d/n,可以设置d/n的值对应到20nm的轴向移动。具体地,当初始入射到的光的光强为i0,第一次入
射到探测器56上的光为501,位置为l1(在探测器56上的初始位置),光强为i1。
[0059]
设第三分光镜的前表面的反射率为r1,透过率为t1,后表面的反射率为r2。不考虑第三分光镜的材料吸收情况,第三分光镜的厚度为d,折射率为n,考虑入射角度为45
°
。
[0060]
以下为光斑光强区别情况下的光强和位置关系,当真实的位置的光强为,i1、i2、i3、i4和i5。根据光路的走向,不同光线路径下对应的位置关系如下:
[0061]
入射到线性探测器56的第一光路501:位置为l1,初始位置
[0062]
入射到线性探测器56的第二光路502:位置为l2,l2=l1 d/n,比l1的位置多了d/n的长度
[0063]
入射到线性探测器56的第三光路503:位置为l3,l3=l1 2d/n
[0064]
入射到线性探测器56的第四光路504:位置为l4,l4=l1 3d/n
[0065]
入射到线性探测器56的第五光路505:位置为l5,l5=l1 4d/n
[0066]
不同光斑在轴向的位置关系为递进d/n,假设真实情况下的该轴向位置(l1~l5)的光强为i1,i2,i3,i4,i5,考虑到不同位置经过时候的透反程度不同,在ccd上每个对应位置的光强都会有变化,实际的光强为i1’,i2’,i3’,i4’,i5’[0067]
入射到线性探测器56的第一光路501:光强i1’=i1*r1,位置为l1,l1为初始位置;
[0068]
入射到线性探测器56的第二光路502:光强i2’=i2*t1*r2*t1=i2*t12*r2
[0069]
入射到线性探测器56的第三光路503:光强i3’=i3*t1*r2*r1*r2*t1=i3*t12*r*r1
[0070]
入射到线性探测器56的第四光路504:光强i4’=i4*t1*r2*r1*r2*r1*r2*t1=i4*t12*r23*r12[0071]
入射到线性探测器56的第五光路505:光强i5’=i5*t1*r2*r1*r2*r1*r2*r1*r2*t1=i5*t12*r24*r13[0072]
简化版本如下
[0073]
入射到线性探测器56的第一光路501:光强i1’=i1*r1,
[0074]
入射到线性探测器56的第二光路502:光强i2’=i2*t12*r2
[0075]
入射到线性探测器56的第三光路503:光强i3’=i3*t12*r*r1
[0076]
入射到线性探测器56的第四光路504:光强i4’=i4*t12*r23*r12[0077]
入射到线性探测器56的第五光路505:光强i5’=i5*t12*r24*r13[0078][0079]
为了将ccd上的光斑光强反映出实际位置的光强,需要通过i1’~i5’,反求出i1~i5。则反求得比例如下
[0080][0081]
上面的计算公式介绍了不同成像位置和成像光强的特点,测量方法如下:
[0082]
光源54关闭,探测器56测量出背景bm,标定探测器56的噪声;
[0083]
对标准样品1进行成像,确定光强的左边界;假设左边界为探测上的第m列,其中入射到线性探测器56的不同光路分布在不同列;重构出衰减比例和位置关系查表图lut,查表图lut的像素数目和ccd的像素数目一致查表图的设定如下:
[0084]
(1)初始设定lut的每个值为0;
[0085]
(2)从左边界位置开始,然后到第m n列的值为1,其中n=[d/n/pixelsize],pixelsize为探测器56的像素尺寸,[]为取整函数;
[0086]
(3)从第m n到m 2n列的值为r1/(t1*r2*t1)
[0087]
(4)从第m 2n到m 3n列的值为r1/(t1*r2*t1*r1*r2)
[0088]
(5)一次到从m kn到m (k 1)n列的值为r1/(t1*r2*t1*r1
k-2
*r2
k-2
);
[0089]
当定位准样品1的成像面后,将该处标定为基准位置,测量出探测器56上的光强图im0,通过如下公式得到新的重构图像im0’:
[0090]
im0’=(im0-bm).*lut
[0091]
其中.*为点乘函数,即将两个图像按照对应位置的值进行相乘;
[0092]
计算出im0’的质心列位置为n0列;
[0093]
当样品1和物镜2的距离产生漂移后,在探测上成像为im1,并计算出重构图像im1’[0094]
im1’=(im1-bm).*lut
[0095]
计算im1’列的质心列位置为n1列;
[0096]
通过如下公式计算得到探测器56上移动位置:
[0097]
d=(n1-n0)*pixel,
[0098]
其中当d为正值时表示光斑往右移动,将拉远样品1和物镜2的距离d/β2,当d为负值是表示光斑往左移动,将拉近样品1和物镜2的距离-d/β2,其中β值为系统的放大倍率。
[0099]
通过以上的操作,能够得出z轴位移台需要的移动距离,5计算得到z轴位移器7需要移动的距离后,z轴位移器7移动相应的距离,在此闭环下,就可以实现物镜2和样品1之间的距离一直保持不变。
[0100]
实施例2
[0101]
参见图4,实施例2和实施例1的区别在于,锁焦探测模组5还包括:准直透镜57;准直透镜57设置在第一分光镜片51和四分之一波片52之间,且准直透镜57、第一分光镜片51和四分之一波片52在同一水平光轴。锁焦探测方法还包括:经过四分之一波片后的圆偏振光入射准直透镜57,经过准直透镜57后变成平行光,平行光入射第一分光镜片51;样品1反射的光经过分光镜片反射后入射准直透镜57,经过准直透镜57后变成聚焦光,聚焦光入射第一分光镜片51。实施例2通过增加准直透镜57避免了用于成像的光的损失。
[0102]
本发明,抛开横向放大率作为光学尺寸的放大,采用轴向放大率作为光学放大率,轴向放大率会正比于横向放大率的平方。这样可以在放大率上至少提高两个数量级,也就是至少可以提高100倍的放大。但是实现轴向放大率的测量比较困难,本发明采用一种新型的方案,将轴向放大率测量出来。
[0103]
上述具体实施方式为本发明的优选实施例,并不能对本发明进行限定,其他的任何未背离本发明的技术方案而所做的改变或其它等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。