技术特征:
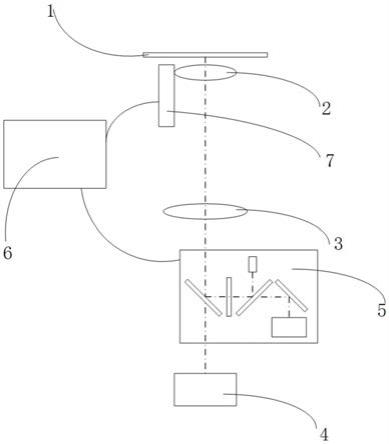
1.一种显微镜的锁焦探测系统,其特征在于,包括:物镜、管镜、锁焦探测模组、锁焦控制器、z轴位移器和成像ccd;z轴位移器设置在物镜的侧边;物镜在样品的正下方,管镜在物镜的正下方,成像ccd在管镜的正下方,锁焦探测模组在管镜和成像ccd的之间,锁焦探测模组、锁焦控制器、z轴位移器依次连接。2.根据权利要求1所述的显微镜的锁焦探测系统,其特征在于,锁焦探测模组包括:第一分光镜片、四分之一波片、第二分光镜片、光源、第三分光镜片和线性探测器;第一分光镜片倾斜设置在管镜的正下方,第一分光镜片、四分之一波片、第二分光镜片和第三分光镜片依次水平设置,第一分光镜片的左面和第二分光镜片的左面相对称,第二分光镜片的右面和第三分光镜片的左面相对称,光源设置在第二分光镜片的左面的正上方,线性探测器设置在第三分光镜片的左面的正上方。3.根据权利要求2所述的显微镜的锁焦探测系统,其特征在于,锁焦探测模组还包括:准直透镜;准直透镜设置在第一分光镜片和四分之一波片之间,且准直透镜、第一分光镜片和四分之一波片在同一水平光轴。4.根据权利要求2所述的显微镜的锁焦探测系统,其特征在于,第二分光镜片为偏振分光片;第三分光镜片的左面镀有透射p态偏振光、反射s态偏振的偏振膜,第三分光镜片的右面镀有全反射膜;第一分光镜片的左面镀有反射红外光、透射可见光的膜。5.一种显微镜的锁焦探测方法,其特征在于,包括:锁焦探测模组探测物镜和样品之间距离的变化量,并将距离的变化量发送至锁焦控制器,锁焦控制器输出移动距离至z轴位移器,z轴位移器移动距离带动物镜1进行移动,将物镜和样品的间距保持在预设的焦距值内。6.根据权利要求5所述的锁焦探测方法,其特征在于,锁焦探测模组探测物镜和样品之间距离的变化量包括:红外探测光经过第三分光镜左面后,一部分光反射到探测器,将此时反射到探测器的这部分光路记为第一光路;另一部分光透过第三分光镜的左面,经过第三分光镜的右面反射,再入射到第三分光镜的左面,一部分光会再次透射出第三分光镜左面,然后入射到探测器,将此时反射到探测器的这部分光路记为第二光路;另一部分光经过第三分光镜的左面反射到第三分光镜的右面,再经过第三分光镜的右面反射后,再有一部分光透射出第三分光镜的左面,将此时反射到探测器的这部分光路记为第三光路;依次类推,依次会有n个光路入射到第三分光镜,探测器探测出不同次数入射到探测器的光的横向位置及其对应的光强,通过查表图lut计算得到探测器上移动位置,n≥3。7.根据权利要求6所述的锁焦探测方法,其特征在于,红外探测光经过第三分光镜左面之前还包括:光源输出线偏振光,经过第二分光镜片反射至四分之一波片,经过四分之一波片后变成圆偏振光,圆偏振光经过第一分光镜片反射,反射后的光依次经过管镜和物镜后入射到样品上;样品反射的光依次经过物镜和管镜后入射第一分光镜片;依次经过第一分光镜片反射、四分之一波片投射后变成p态偏振光,p态偏振光为红外探测光。8.根据权利要求6所述的锁焦探测方法,其特征在于,还包括:经过四分之一波片后的圆偏振光入射准直透镜,经过准直透镜后变成平行光,平行光入射第一分光镜片;样品反射
的光经过分光镜片反射后入射准直透镜,经过准直透镜后变成聚焦光,聚焦光入射第一分光镜片。9.根据权利要求7所述的锁焦探测方法,其特征在于,第三分光镜片的左面的反射率为r1,透过率为t1,右面的反射率为r2,第三分光镜片的厚度为d,折射率为n,入射角度为45
°
;初始入射到第三分光镜片的光强为i0入射到线性探测器的第一光路:光强i1’=i1*r1,位置为l1,l1为初始位置;入射到线性探测器的第二光路:光强i2’=i2*t12*r2,位置l2=l1 d/n;入射到线性探测器的第三光路:光强i3’=i3*t12*r*r1,位置l3=l1 2d/n;入射到线性探测器的第四光路:光强i4’=i4*t12*r23*r12,位置l4=l1 3d/n;入射到线性探测器的第五光路505:光强i5’=i5*t12*r23*r12,位置l4=l1 3d/n;其中i1、i2、i3、i4和i5分别为真实情况下的轴向位置l1、l2、l3、l4、l5对应的光强,i1、i2、i3、i4和i5通过下式求得:10.根据权利要求9所述的锁焦探测方法,其特征在于,包括:光源关闭,探测器测量出背景bm,标定探测器的噪声;对标准样品进行成像,确定光强的左边界;假设左边界为探测上的第m列,其中入射到线性探测器的不同光路分布在不同列;重构出衰减比例和位置关系查表图lut,查表图lut的像素数目和ccd的像素数目一致查表图的设定如下:(1)初始设定lut的每个值为0;(2)从左边界位置开始,然后到第m n列的值为1,其中n=[d/n/pixelsize],pixelsize为探测器的像素尺寸,[]为取整函数;(3)从第m n到m 2n列的值为r1/(t1*r2*t1)(4)从第m 2n到m 3n列的值为r1/(t1*r2*t1*r1*r2)(5)一次到从m kn到m (k 1)n列的值为r1/(t1*r2*t1*r1
k-2
*r2
k-2
);当定位准样品的成像面后,将该处标定为基准位置,测量出探测器上的光强图im0,通过如下公式得到新的重构图像im0’:im0’=(im0-bm).*lut其中.*为点乘函数,即将两个图像按照对应位置的值进行相乘;计算出im0’的质心列位置为n0列;当样品和物镜的距离产生漂移后,在探测上成像为im1,并计算出重构图像im1’im1’=(im1-bm).*lut计算im1’列的质心列位置为n1列;通过如下公式计算得到探测器上移动位置:d=(n1-n0)*pixel,其中当d为正值时表示光斑往右移动,将拉远样品和物镜的距离d/β2,当d为负值是表示光斑往左移动,将拉近样品和物镜的距离-d/β2,其中β值为系统的放大倍率。
技术总结
本发明公开了一种显微镜的锁焦探测系统和方法,该方法包括,锁焦探测模组探测物镜和样品之间距离的变化量,并将距离的变化量发送至锁焦控制器,锁焦控制器输出移动距离至Z轴位移器,Z轴位移器移动距离带动物镜1进行移动,将物镜和样品的间距保持在预设的焦距值内。本发明抛开横向放大率作为光学尺寸的放大,采用轴向放大率作为光学放大率,将轴向放大率测量出来,轴向放大率会正比于横向放大率的平方,做到更加精密的探测。做到更加精密的探测。做到更加精密的探测。
技术研发人员:杨乐宝 王宏达
受保护的技术使用者:广东粤港澳大湾区黄埔材料研究院
技术研发日:2021.02.25
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。