技术特征:
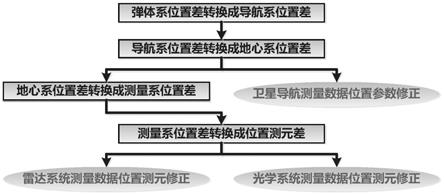
1.一种运载火箭多源多类测量数据位置基准高精度对齐方法,其特征在于,包括如下步骤:步骤一、弹体系位置差转换成导航系位置差;步骤二、导航系位置差转换成地心系位置差;步骤三、分不同的测量系统进行位置测量数据的修正;对卫星导航测量系统位置测量数据的修正,执行步骤四;对于雷达测量系统位置测量数据的修正,执行步骤五至步骤七;对于光学测量系统位置测量数据的修正,执行步骤八至步骤十;步骤四、基于地心系位置差对卫星导航位置测量数据进行修正;步骤五、地心系位置差转换成雷达测量系统测量系位置差;步骤六、雷达测量系统测量系位置差转换成雷达测量系统位置测元差;步骤七、基于雷达测量系统位置测元差对雷达测量系统位置测元数据进行修正;步骤八、地心系位置差转换成光学测量系统测量系位置差;步骤九、光学测量系统测量系位置差转换成光学测量系统位置测元差;步骤十、基于光学测量系统位置测元差对光学测量系统位置测元数据进行修正。2.如权利要求1所述的运载火箭多源多类测量数据位置基准高精度对齐方法,其特征在于,所述步骤一进一步包括:按照(1)式将弹体系位置差转换成导航系位置差转换成导航系位置差式中,t
g1
是运载火箭弹体坐标系到导航平台测量坐标系的方向转换矩阵,具体计算式为:式中,为弹体坐标系相对于导航平台测量坐标系的姿态角,该数据可以直接从运载火箭的计算机字遥测参数中获取。3.如权利要求2所述的运载火箭多源多类测量数据位置基准高精度对齐方法,其特征在于,所述步骤二进一步包括:按照(2)式将导航系位置差转换成地心系位置差转换成地心系位置差式中,t
og
是运载火箭导航测量坐标系到地心坐标系的方向转换矩阵,具体计算式为:式中,t为运载火箭相对于导航计算开始时刻的飞行时间,ω
e
为地球自转角速率,b0、l0、a0分别为运载火箭的发射点地理纬度、地理经度、发射方位角。
4.如权利要求3所述的运载火箭多源多类测量数据位置基准高精度对齐方法,其特征在于,所述步骤四进一步包括:根据步骤二得到的地心系位置差按照(3)式计算卫星导航位置测量数据[x
s y
s z
s
]
t
的修正值的修正值5.如权利要求4所述的运载火箭多源多类测量数据位置基准高精度对齐方法,其特征在于,所述步骤五进一步包括:按照(4)式将地心系位置差转换成雷达测量系统测量系位置差转换成雷达测量系统测量系位置差式中,t
mo
是地心坐标系到雷达测量系统测量坐标系的方向转换矩阵,具体计算式为:式中,b和l分别为雷达测量系统的地理纬度和地理经度。6.如权利要求5所述的运载火箭多源多类测量数据位置基准高精度对齐方法,其特征在于,所述步骤六进一步包括:按照(5)式将雷达测量系统测量系位置差转换成雷达测量系统位置测元差[dr da de]
t
:式中,t
am
是雷达测量系统测量系位置差到雷达测量系统位置测元差的转换矩阵,具体计算式为:式中,[r a e]
t
为雷达测量系统的位置测元,其中r表示斜距测元,a表示方位角测元,e表示高低角测元。7.如权利要求6所述的运载火箭多源多类测量数据位置基准高精度对齐方法,其特征在于,所述步骤七进一步包括:根据步骤五得到的雷达测量系统位置测元差[dr da de]
t
,按照(7)式计算雷达测量系
统位置测元数据[r a e]
t
的修正值的修正值8.如权利要求7所述的运载火箭多源多类测量数据位置基准高精度对齐方法,其特征在于,所述步骤八进一步包括:按照(8)式将地心系位置差转换成光学测量系统测量系位置差转换成光学测量系统测量系位置差式中,是地心坐标系到光学测量系统测量坐标系的方向转换矩阵,具体计算式为:式中,b
g
和l
g
分别为光学测量系统的地理纬度和地理经度。9.如权利要求8所述的运载火箭多源多类测量数据位置基准高精度对齐方法,其特征在于,所述步骤九进一步包括:9.1估算光学测量系统的斜距测元
①
根据t时刻前10s之内卫星导航测量系统测量的运载火箭位置数据序列序号i对应着运载火箭的飞行时刻t
i
,i=1,2,
…
,n,按照下式计算运载火箭在光学测量系统测量坐标系的位置数据序列:式中,是地心坐标系到光学测量系统测量坐标系的方向转换矩阵;
②
根据运载火箭在光学测量系统测量坐标系的位置数据序列按照下式计算运载火箭在光学测量系统测量坐标系的斜距序列
③
采用二阶多项式端点平滑方法,按照(9)式估算光学测量系统的斜距测元采用二阶多项式端点平滑方法,按照(9)式估算光学测量系统的斜距测元式中,
9.2按照(10)式将光学测量系统测量系位置差转换成光学测量系统位置测元差转换成光学测量系统位置测元差式中,是光学测量系统测量系位置差到光学测量系统位置测元差的转换矩阵,具体计算式为:式中,(a e)为光学测量系统的角度测元。10.如权利要求9所述的运载火箭多源多类测量数据位置基准高精度对齐方法,其特征在于,所述步骤十进一步包括:根据步骤八得到的光学测量系统的位置测元差按照(11)式计算光学测量系统位置测元数据的修正值的修正值
技术总结
本发明属于航天发射领域与航天测控领域,公开了一种运载火箭多源多类测量数据位置基准修正方法,利用惯性导航测量系统测量位置与其它测量系统测量位置之间的差异,通过修正测量位置偏差所引起的测元偏差对其进行修正,从而实现所有位置测量数据在空间位置上的一致性。根据本发明提供的技术途径,雷达测量系统、光学测量系统和卫星导航测量系统与惯性导航测量系统在弹体坐标系中的测量位置偏差的实测精度决定了这三类测量系统位置测元的修正精度,因此,可以有效地解决运载火箭多来源多类型测量数据位置基准高精度对齐的问题。类型测量数据位置基准高精度对齐的问题。类型测量数据位置基准高精度对齐的问题。
技术研发人员:陈德明 王婷婷 陈永健 唐志强
受保护的技术使用者:中国人民解放军63620部队
技术研发日:2021.09.23
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。