emc近场电磁场检测设备
技术领域
1.本发明涉及电磁场测量技术领域,具体涉及emc近场电磁场检测设备。
背景技术:
2.电磁辐射检测仪可用于电场、磁场辐射检测。电磁辐射检测仪适用于居家、办公室、户外、工业场所等场所。
3.现有技术在对电子电路板检测磁场时,需要手持检测探头,在检测过程中往往因为人工操作不稳定,导致检测数据失真,同时容易造成某些测量点数据丢失。
技术实现要素:
4.本发明的主要目的是提出了emc近场电磁场检测设备,可以有效解决背景技术中的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:emc近场电磁场检测设备,包括近场探头,所述近场探头固定安装在四轴机械臂上,所述四轴机械臂固定安装在底座上,被测工件通过定位夹具固定安装在底座上,所述近场探头电性连接在控制装置上,所述控制装置分别电性连接在四轴机械臂和频谱分析仪上;所述控制装置包括运动控制模块、电磁检测控制模块与数据处理模块,所述运动控制模块用于控制四轴机械臂运动,所述电磁检测控制模块用于控制近场探头的启闭,所述数据处理模块用于控制频谱分析仪的数据处理。
6.优选地,近场探头电性连接在显示装置与报警装置上。
7.优选地,所述数据处理模块用于存储被测工件的数据,并处理生成分析报告。
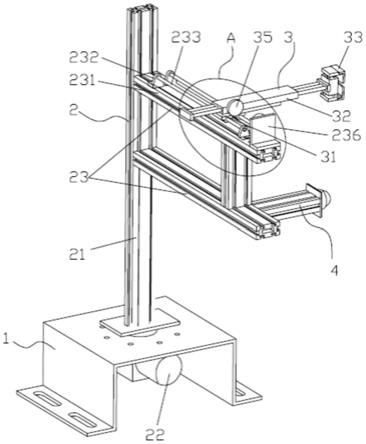
8.优选地,所述四轴机械臂包括竖直的支撑臂,所述支撑臂上滑动安装有第一转动臂,所述第一转动臂的底部转动安装有第二转动臂,所述第二转动臂的底部转动安装有第三转动臂,所述第三转动臂底部固定安装有转动轴,所述近场探头固定安装在转动轴上。
9.优选地,所述第一转动臂内设置有第一驱动结构,第二转动臂内设置有第二驱动结构,所述第三转动臂内设置有第三驱动结构,所述驱动轴内设置有第四驱动结构,所述第一驱动结构、第二驱动结构、第三驱动结构与第四驱动结构分别电性连接在控制装置上。
10.优选地,所述第二驱动结构沿第二转动臂所在延长线的转动角度在-90度至 90度之间。
11.优选地,所述第三驱动结构沿在第三转动臂所在延长线的转动角度在-164度至 164度之间。
12.优选地,所述第四驱动结构的转动角度沿驱动轴中轴线的0度至 360度之间。
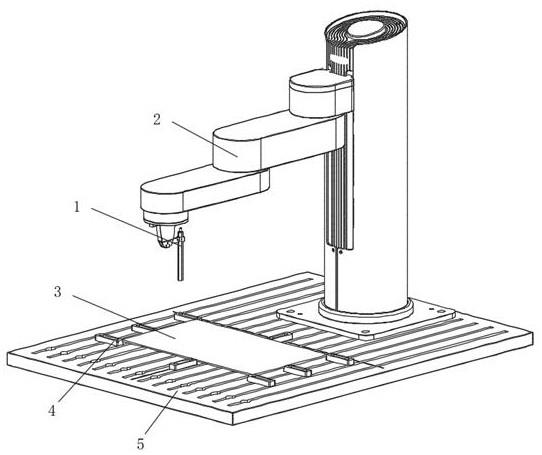
13.优选地,所述底座上开设有若干安装槽,所述安装槽内固定安装有卡块,所述被测工件卡装在卡块内。
14.本发明提供emc近场电磁场检测设备,具备以下有益效果:通过将近场探头固定安装在四轴机械臂上,通过控制装置发出信号控制四轴机械臂运动,能够实现近场探头在被
测工件上方实现任意位置、任意轨迹、任意速度的检测,同时能够实现检测轨迹的精确定位,进而加快检测效率,加强适应能力。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
16.图1为本发明的立体结构示意图;图2为本发明的俯视结构示意图。
具体实施方式
17.为使本发明目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
18.实施例一,如图1至图2所示,包括近场探头,近场探头固定安装在四轴机械臂上,四轴机械臂固定安装在底座上,被测工件通过定位夹具固定安装在底座上,近场探头电性连接在控制装置上,控制装置分别电性连接在四轴机械臂和频谱分析仪上;控制装置包括运动控制模块、电磁检测控制模块与数据处理模块,运动控制模块用于控制四轴机械臂运动,电磁检测控制模块用于控制近场探头的启闭,数据处理模块用于控制频谱分析仪的数据处理。
19.工作原理:使用近场探头和频谱分析仪允许在9khz到3 ghz的频率范围内,对待检测部件进行检测,近场探头为使用拥有特殊绝缘场的探头,频谱分析仪上读取检测数据和操作数据,频谱分析仪输出显示图形,可实现测量数据的存储和输出。
20.控制装置利用四轴机械臂运动系统运动,可实现三维空间内任意位置、任意轨迹以及任意速度的自定义,因此本设备拥有实现检测点(或者检测轨迹)的精确定位和速度增减功能,手自动切换等功能,进而加快检测效率,加强适应能力。
21.实施例二,本实施例作为实施例一的一种优选的技术方案,近场探头电性连接在显示装置与报警装置上。通过显示装置显示近场探头的工作情况,便于远程观察,近场探头所在的驱动轴一旦碰触极限位,则会立即停止,并通过报警装置提示操作人员重新放置待检测工件位置。
22.实施例三,本实施例作为实施例一的一种优选的技术方案,数据处理模块用于存储被测工件的数据,并处理生成分析报告。在实际使用过程中,可根据近场测量环境的不同而使用不同式样的近场探头端,控制装置发出信号控制频谱分析仪进行数据处理,频谱分析仪具备迅速产生检测分析报告功能、报告存储功能、查询历史报告功能、打印文档功能、导出文档功能等功能。例如实验需求纵向分析实验报告数据时,则可以通过历史分析报告的查询和导出等功能,迅速抓取分析数据点,从而加快分析速度,提高工作效率。
23.实施例四,本实施例作为实施例一的一种优选的技术方案,四轴机械臂包括竖直的支撑臂,支撑臂上滑动安装有第一转动臂,第一转动臂的底部转动安装有第二转动臂,第二转动臂的底部转动安装有第三转动臂,第三转动臂底部固定安装有转动轴,近场探头固定安装在转动轴上。第一转动臂滑动安装在支撑臂上,能够调节近场探头在竖直方向上的位置,第一转动臂与第三转动臂转动,能调节近场探头在水平位置上的位置。
24.第一转动臂内设置有第一驱动结构,第二转动臂内设置有第二驱动结构,第三转动臂内设置有第三驱动结构,驱动轴内设置有第四驱动结构,第一驱动结构、第二驱动结构、第三驱动结构与第四驱动结构分别电性连接在控制装置上。第一驱动结构可采用链条驱动,第二驱动结构、第三驱动结构与第四驱动结构均可采用常规电机带动齿轮转动的方式,进而带动第二转动臂、第三转动臂及转动轴转动,从而调节近场探头的位置。
25.实施例五,本实施例作为实施例四的一种优选的技术方案,第二驱动结构沿第二转动臂所在延长线的转动角度在-90度至 90度之间。第三驱动结构沿在第三转动臂所在延长线的转动角度在-164度至 164度之间。第四驱动结构的转动角度沿驱动轴中轴线的0度至 360度之间。分别限制第二转动臂、第三转动臂与驱动轴的转动角度,能够限制近场探头设置在待检测工件的范围内。
26.实施例六,本实施例作为实施例一的一种优选的技术方案,底座上开设有若干安装槽,安装槽内固定安装有卡块,被测工件卡装在卡块内。通过将被测工件卡装在卡块内,并将卡块卡装在安装槽内,进一步对被测工件进行扫描,得出被测工件的磁场状况,在需要更换被测工件时,调整卡块在不同的安装槽内,可以进一步对被测工件进行限制。
27.以上实施例仅用以说明本发明的技术方案,而非对其限制;本发明附图中的图案填充不代表结构的材料,仅对结构进行区分;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。