1.本发明属于汽车可靠性测试技术领域,具体涉及一种车门开闭实验系统。
背景技术:
2.车门开闭耐久试验中,一个完整的试验循环包括:按遥控钥匙解锁键
→
整车解锁
→
隐藏式外把手伸出(若有)
→
打开车门
→
关闭车门
→
按遥控钥匙闭锁键
→
整车闭锁
→
隐藏式外把手缩回(若有)。
3.目前的车门开闭耐久试验系统主要是将夹具安装在门外把手上,对于隐藏式外把手的车门,需要将部分夹具安装在车门外钣金上,对车门结构具有一定程度的破坏性,且无法有效地模拟车门把手在实际使用中的解锁工况。
技术实现要素:
4.本发明实施例所要解决的技术问题在于,提供一种车门开闭实验系统,以解决现有的测试系统需对车门结构产生一定程度的破坏,且无法有效地模拟车门把手在实际使用中的解锁工况的问题。
5.为解决上述技术问题,本发明提供一种车门开闭实验系统,包括:
6.第一底座;
7.旋转机构,在水平面内可旋转地设置在所述第一底座上;
8.机械手臂,相对所述旋转机构可伸缩地设置在所述旋转机构上,用于在伸长时抓取车门外把手,并在所述旋转机构向远离车门的方向旋转带动下打开车门,还用于在车门打开后松开车门外把手同时缩短收回;
9.关门推杆,设置在所述旋转机构上,用于在所述旋转机构向靠近车门的方向旋转带动下推动车门关闭。
10.进一步地,还包括遥控钥匙操作模块,用于按压遥控钥匙的开锁键进行远程开锁;所述机械手臂在收到开锁信号后打开车门再关闭车门,所述遥控钥匙操作模块还用于在收到所述关门推杆发出的关门信号后按压遥控钥匙的闭锁键,进行远程闭锁。
11.进一步地,所述旋转机构包括:
12.第一立板,设置在所述第一底座上;
13.电机,与所述第一立板连接,用于驱动所述第一立板旋转;
14.第一横板,一端连接在所述第一立板上,所述机械手臂和所述关门推杆设置在所述第一横板上。
15.进一步地,所述机械手臂可滑动地连接在所述第一横板的顶面,所述机械手臂上设置有第一磁性件;
16.所述第一横板远离所述第一立板的一端设置有第二磁性件,用于在关闭车门时吸附所述第一磁性件,固定所述机械手臂。
17.进一步地,所述第一横板的顶面沿着垂直于所述第一立板的方向设置有一对轴
座,所述轴座之间架设有第一光轴,所述机械手臂通过直线轴承可滑动地连接在所述第一光轴上。
18.进一步地,所述机械手臂还包括:
19.安装板,通过所述直线轴承连接在所述第一光轴上;
20.第一气缸,设置在所述安装板上;
21.气爪,设置在所述第一气缸远离所述安装板的一端,用于在所述第一气缸的驱动下靠近车门抓取车门外把手或车门打开后松开车门外把手远离车门。
22.进一步地,还包括第二电磁阀组,用于控制所述第一气缸的执行动作。
23.进一步地,所述遥控钥匙操作模块包括:
24.第二底座;
25.固定机构,设置在所述第二底座上,用于将遥控钥匙夹持固定;
26.按键按压机构,设置在所述第二底座上并位于所述固定机构的上方,用于按压遥控钥匙的开锁键或闭锁键。
27.进一步地,所述固定机构包括:
28.两个光轴支撑板,相对地设置在所述第二底座上;
29.第二光轴,架设在两个所述光轴支撑板之间;
30.两个夹板,相对设置,套接在所述第二光轴上,并位于两个所述光轴支撑板之间;其中,至少一个夹板为活动夹板,相对所述第二光轴可自由滑动;
31.调节杆,与靠近活动夹板的光轴支撑板连接,并在贯穿该光轴支撑板后与所述活动夹板连接,用于调节所述活动夹板在所述第二光轴上的位置,控制夹紧或松开遥控钥匙。
32.进一步地,所述按键按压机构包括:
33.两个第二立板,相对设置在所述第二底座上;
34.第二横板,架设在两个所述第二立板之间,并位于所述固定机构的上方;
35.第二气缸,设置在所述第二横板上,用于按压遥控钥匙的开锁键或闭锁键。
36.实施本发明实施例,具有如下有益效果:本系统工装夹具不安装在车门钣金或者门把手上,不破坏试验样件的完整性,且不会产生额外的负载,同时将隐藏式外把手的伸缩和整车解锁、闭锁动作与车门开闭循环结合在一起,有效地模拟车门把手在实际使用中的解锁工况,保证了系统试验的准确性和完整性,并且本试验系统同时适用于隐藏式车门外把手、固定式车门外把手和单独外把手部件的可靠性测试。
附图说明
37.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
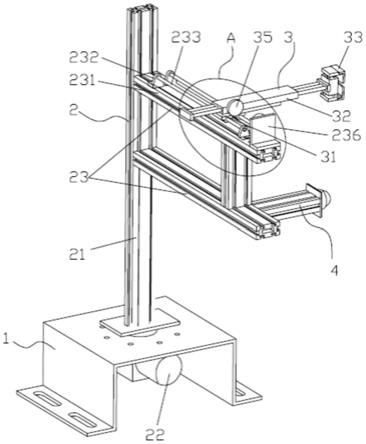
38.图1为本发明实施例提供的车门开闭操作模块结构图。
39.图2为本发明实施例提供的遥控钥匙操作模块结构图。
40.图3为图1中a部分的局部放大图。
41.图4为本发明实施例提供的车门开闭实验系统控制原理图。
42.图5为本发明实施例提供的车门开闭实验系统控制逻辑图。
具体实施方式
43.以下各实施例的说明是参考附图,用以示例本发明可以用以实施的特定实施例。
44.本发明实施例提供了一种车门开闭实验系统,包括:包括相互通信连接的车门开闭操作模块(如图1所示)和遥控钥匙操作模块(如图2所示)。遥控钥匙操作模块用于按压遥控钥匙的开锁键进行远程开锁;车门开闭操作模块用于在收到开锁信号后打开车门再关闭车门,遥控钥匙操作模块还用于在收到车门开闭操作模块发出的关门信号后按压遥控钥匙的闭锁键,进行远程闭锁。
45.车门开闭操作模块具体包括第一底座1、旋转机构2、机械手臂3和关门推杆4。旋转机构2设置在第一底座1上,并相对第一底座1在水平面内可旋转;机械手臂3设置在旋转机构2上,并且相对旋转机构2可伸长或缩短,用于在伸长时抓取车门外把手,并在旋转机构2向远离车门的方向旋转带动下打开车门,还用于在车门打开后松开车门外把手同时缩短收回;关门推杆4,设置在旋转机构2上,用于在旋转机构2向靠近车门的方向旋转带动下推动车门关闭。
46.本实验系统完整的工作循环包括流程:按遥控钥匙解锁键
→
整车解锁
→
车门隐藏式外把手伸出(若有)
→
机械手臂3伸长抓取门外把手
→
旋转机构2向远离车门的方向旋转(顺时针转动)
→
机械手臂3打开车门
→
机械手臂3松开车门外把手并缩回
→
旋转机构2向靠近车门的方向旋转(逆时针转动)
→
关门推杆4推动车门关闭
→
按遥控钥匙闭锁键
→
整车闭锁
→
隐藏式外把手缩回(若有)。
47.本系统工装夹具不安装在车门钣金或者门把手上,不破坏试验样件的完整性,且不会产生额外的负载,同时将隐藏式外把手的伸缩和整车解锁、闭锁动作与车门开闭循环结合在一起,有效地模拟车门把手在实际使用中的解锁工况,保证了系统试验的准确性和完整性,并且本试验系统同时适用于隐藏式车门外把手、固定式车门外把手和单独外把手部件的可靠性测试。
48.继续参照图1,本发明的旋转机构2具体包括:第一立板21、电机22和第一横板23。第一立板21设置在第一底座1上;电机22可以是带减速机电机,与第一立板21连接,驱动第一立板21旋转;第一横板23的一端连接在第一立板21上,机械手臂3和关门推杆4设置在第一横板23上。优选的,为了减轻结构的重量,第一横板23可以设置为如图所示的工字型框架结构,第一立板21和工字型框架均可以采用40
×
80铝型材制作。
49.基于上述旋转机构2的结构,并配合旋转机构2的旋转完成车门的打开动作及复位,机械手臂3可以设置在第一横板23的顶面231,并且在顶面231上可自由滑动。一种具体的自由滑动实施例如图1、图3所示,第一横板23的顶面231沿着垂直于第一立板21的方向设置有一对轴座232,轴座232之间架设有第一光轴233,机械手臂3通过直线轴承234连接在第一光轴233上。即机械手臂3通过直线轴承234可以在第一横板23的顶面231上自由滑动。机械手臂3上还设置有第一磁性件35,同时在第一横板23远离第一立板21的一端设置有第二磁性件235,用于在关闭车门时吸附第一磁性件35固定机械手臂3。第二磁性件235的具体固定方式为:可以在第一横板23上设置磁性件固定板236,将第二磁性件235固定在磁性件固定板236上,其中一个实施例中,第一磁性件35和第二磁性件235分别是磁性材料和电磁铁,
可以通过设置一继电器来控制电磁铁通电与断电,进而控制第一磁性件35和第二磁性件235之间是否产生吸引力。
50.具体的,一种机械手臂3的实施例如图1和图3所示,包括:安装板31、第一气缸32和气爪33。安装板31通过直线轴承234连接在第一光轴233上;第一气缸32固定在安装板31上;气爪33设置在第一气缸32远离安装板31的一端,即靠近车门的一端,气爪33的末端设置有两个模拟手指,在第一气缸32的驱动下可张开或合拢。整个动作为:在第一气缸的驱动下,气爪33可向车门靠近抓取车门外把手;或者在在第一气缸的驱动下,气爪33的模拟手指松开车门外把手然后远离车门,第一气缸32的上述执行动作可以通过设置一第二电磁阀组来控制。
51.本实施例中车门开闭操作模块的工作原理为:在收到远程开锁信号后,第一气缸32伸长,并在气爪33移动至车门外把手时控制气爪33的模拟手指合拢抓住车门外把手,电磁铁断电,机械手臂3可在第一横板23上自由滑动。然后由电机22驱动第一立板21顺时针旋转(以图示结构的方向为例),机械手臂3将车门拉开,在拉开车门的过程中,机械手臂3适应性沿着第一横板23上的第一光轴233向第一立板21的方向滑动。在车门打开后,第一气缸32控制气爪33的模拟手指张开松开车门外把手,并缩短收回,在机械手臂3缩短收回后,电机22驱动第一立板21逆时针旋转,机械手臂3在离心力的作用下,沿着第一横板23上的第一光轴233向远离第一立板21的方向滑动,并最终在第二磁性件235吸附第一磁性件35的作用下保持固定,关门推杆4在第一立板21的旋转带动下推动车门将车门关闭,以上为车门开闭操作模块的一个工作循环。本系统在应用时,需要首先调试好机械手臂3和关门推杆4的初始位置以及第一立板21的初始角度,在明示了工作原理的情况下,本发明对调试过程不再赘述。
52.不同的车型,车门外把手的高度不同。为了适应不同的车型,第一横板23在第一立板21上的安装高度设置为可调节的。为了避免关门推杆4在推车门时对车门造成冲击损坏,可在关门推杆4靠近车门的一端端部设置缓冲件。
53.进一步地,参考图2,本发明实施例提供了一种遥控钥匙操作模块,包括:第二底座5、固定机构6和按键按压机构7。固定机构6设置在第二底座5上,用于将遥控钥匙夹持固定;按键按压机构7设置在第二底座5上并位于固定机构6的上方,用于按压遥控钥匙的开锁键或闭锁键。
54.其中,固定机构6的实施例如图2所示,包括两个光轴支撑板61、第二光轴62、两个夹板63a、63b和调节杆64。两个光轴支撑板61相对地设置在第二底座5上;第二光轴62优选设置为两个,架设在两个光轴支撑板61之间;两个夹板63a、63b相对设置,套接在第二光轴62上,并位于两个光轴支撑板61之间,其中,至少一个夹板为活动夹板,相对第二光轴62可自由滑动。本实施例中,两个夹板63a、63b均为活动夹板,调节杆64也对应设置两个,可以是细牙螺杆,每个调节杆64分别与光轴支撑板61螺纹连接,并在贯穿该光轴支撑板61后与对应的夹板63a、63b连接,用于调节夹板63a、63b在第二光轴上的位置,控制夹紧或松开遥控钥匙。
55.由于遥控钥匙的侧面一般为平滑曲面,为了避免打滑夹持不稳定,可以在至少一个夹板的夹持面631设置防滑结构632,例如设置v形槽结构。
56.按键按压机构的实施例如图2所示,具体包括:两个第二立板71、第二横板72和第
二气缸73。两个第二立板71相对设置在第二底座5上;第二横板72架设在两个第二立板71之间,并位于固定机构6的上方;第二气缸73设置在第二横板72上,可以是可调行程自动复位迷你气缸,两个按压结构分别用于按压遥控钥匙的开锁键、闭锁键,第二气缸73的执行动作可以通过设置一第一电磁阀组来控制。
57.为了调节第二气缸73在夹持方向的位置,可以将第二立板71的安装位置设置为可调节的。例如,在第二底座5上设置腰型沉头孔51,第二立板71的底端设置螺纹孔,第二立板71通过螺栓连接至腰型沉头孔,可随着腰型沉头孔滑动改变位置并固定。
58.为了调节第二气缸73在第二横板72的延伸方向的位置,可以将第二气缸73的安装位置设置为可调节的。例如可在第二横板72上设置滑槽721,第二气缸73可以固定在滑槽721中的任意位置。
59.基于上述车门开闭操作模块和遥控钥匙操作模块的具体实施例,以隐藏式车门外把手伸车辆为例,本发明的车门开闭实验系统控制原理如图4所示,控制逻辑如图5所示,其中电磁阀组1表示第一电磁阀组,电磁阀组2表示第二电磁阀组,具体包括如下步骤:
60.(1)电磁阀组1控制第二气缸73伸出,按压遥控钥匙解锁按键;
61.(2)整车解锁,隐藏式车门外把手伸出;
62.(3)电磁阀组2控制第一气缸32伸出;
63.(4)电磁阀组2控制第一气缸32驱动气爪33的模拟手指合拢,插入车门外把手与车门外板之间的空隙,抓住车门外把手;
64.(5)继电器断开,电磁铁(第二磁性件235)断电不工作,滑动约束解除,机械手臂3可在第一横板23上自由滑动;
65.(6)电机22工作,第一立板21旋转带动机械手臂3打开车门,机械手臂3适应性在第一横板23上滑动;
66.(7)电磁阀组2控制第一气缸32驱动气爪33的模拟手指张开,退出车门外把手与车门外板之间的空隙;
67.(8)电磁阀组2控制第一气缸32缩回;
68.(9)继电器吸合,电磁铁通道工作;
69.(10)电机22工作,第一立板21旋转带动关门推杆4关闭车门,机械手臂3在离心力作用向电磁铁的方向滑动,电磁铁吸附第一磁性件35,将机械手臂3固定;
70.(11)电磁阀组1控制第二气缸73伸出,按压遥控钥匙闭锁按键;
71.(12)隐藏式车门外把手缩回,整车闭锁。
72.本发明的车门开闭实验系统,具体可以应用于车辆车门开闭耐久试验或单独外把手部件的可靠性测试,上述测试应用既可适用隐藏式车门外把手车辆,也适用于固定式车门外把手车辆。
73.通过上述说明可知,与现有技术相比,本发明的有益效果在于:本系统工装夹具不安装在车门钣金或者门把手上,不破坏试验样件的完整性,且不会产生额外的负载,同时将隐藏式外把手的伸缩和整车解锁、闭锁动作与车门开闭循环结合在一起,有效地模拟车门把手在实际使用中的解锁工况,保证了系统试验的准确性和完整性,并且本试验系统同时适用于隐藏式车门外把手、固定式车门外把手和单独外把手部件的可靠性测试。
74.以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范
围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。