1.本发明属于传感器技术领域,特别是涉及一种可变匝数的磁聚焦式传感器及转速、扭矩计算方法。
背景技术:
2.已有的传感器不能同时测量转速和扭矩。现有的传感器是激励线圈固定,接收线圈随待测轴转动,信号经无线传输给外部设备。在磁场较强的区域内,信号会产生较大干扰,使之使用环境有限。已有的非接触式测量转速的传感器都是根据涡流原理,涡流是非线性的,须通过复杂的结构设计,才能提取出线性信号,且传感器内部空间存在激励线圈的交变磁场和转子的涡流场,需设计复杂的解耦结构。
技术实现要素:
3.本发明为了解决现有技术中的问题,提出一种可变匝数的磁聚焦式传感器及转速、扭矩计算方法。
4.为实现上述目的,本发明采用以下技术方案:一种可变匝数的磁聚焦式传感器,它包括待测轴和采集机构,所述待测轴两端分别为轴输入端和轴输出端,所述采集机构分别设置在轴输入端和轴输出端处,所述采集机构包括固定环、永磁体、接收线圈和罩壳,所述固定环内圈与待测轴相连,外圈与永磁体相连,所述永磁体数量为多个,多个永磁体沿固定环圆周方向均布,所述永磁体为锥形结构,所述接收线圈包括若干个矩形线圈,若干个矩形线圈弯依次弯曲环绕排列成圆周状,设置在轴输入端处的为第一接收线圈,设置在轴输出端处的为第二接收线圈,每个矩形线圈的匝数均为多匝,其中10匝始终保持通路,其余匝数通过开关与单片机相连,所述接收线圈印制在定子柔性电路板上,所述定子柔性电路板数量为多个,每个定子柔性电路板上均印制一个接收线圈,多个定子柔性电路板层层叠加,所述定子柔性电路板固定连接在罩壳的接收线圈固定面上,所述罩壳的把手内部设置有定子处理电路。
5.更进一步的,所述永磁体数量为三个。
6.更进一步的,所述接收线圈包括24个矩形线圈。
7.更进一步的,所述把手侧面开设有线束出口。
8.更进一步的,所述矩形线圈通过电压引脚与开关和单片机相连。
9.更进一步的,所述罩壳为分体结构,把手上开设有固定孔,通过固定螺钉将分体罩壳相连。
10.更进一步的,定子处理电路设置在把手的电路板固定面上。
11.本发明还提供了一种使用可变匝数的磁聚焦式传感器的转速计算方法,它包括以下步骤:
12.步骤一:空间磁场由永磁体产生,通过设计永磁体的尺寸和固定环的厚度,使磁场聚焦于待测轴上一点,该点为磁聚焦点,所述磁聚焦点位于接收线圈矩形内部;
13.步骤二:随着待测轴的转动,所述磁聚焦点的轨迹是圆,磁聚焦点在接收线圈矩形内部时,由于接收线圈内部的磁通量改变,接收线圈上产生感应电压,感应电压的大小与永磁体和接收线圈的耦合面积有关,当永磁体位于接收线圈内部且静止时,接收线圈的感应电压为零;
14.步骤三:对接收线圈的矩形进行编号,单片机记录采集感应电压的时序,接收线圈的编号从小到大产生感应电压,则可判断此时的旋转方向为正转,反之,则为反转;
15.步骤四:磁聚焦点转动到接收线圈内部的过程中,根据公式:
[0016][0017]
式中:b为磁感应强度;n为接收线圈的匝数;s为矩形的面积;u为接收线圈的感应电压,t为时间,φ为磁通量,由公式可知,b一定的情况下,一定时间内,感应电压与s成正比,s的变化,导致u的变化;
[0018]
步骤五:单片机通过采集接收线圈的电压值,判断具体哪个接收线圈有电压,当该线圈的电压为零时,通过单片机控制该接收线圈的匝数开关,使n产生变化,进而使接收线圈继续产生感应电压;
[0019]
步骤六:当永磁体位于接收线圈两个矩形线圈之间时,感应电压恒为零,此时单片机采集到的电压为低电平。通过记录低电平的间隔时间,计算待测轴的转速。
[0020]
本发明还提供了一种使用可变匝数的磁聚焦式传感器的扭矩计算方法,它包括以下步骤:
[0021]
步骤一:空间磁场由永磁体产生,通过设计永磁体的尺寸和固定环的厚度,使磁场聚焦于待测轴上一点,该点为磁聚焦点,所述磁聚焦点位于接收线圈矩形内部;
[0022]
步骤二:随着待测轴的转动,所述磁聚焦点的轨迹是圆,磁聚焦点在接收线圈矩形内部时,由于接收线圈内部的磁通量改变,接收线圈上产生感应电压,感应电压的大小与永磁体和接收线圈的耦合面积有关,当永磁体位于接收线圈内部且不转动时,接收线圈的感应电压为零;
[0023]
步骤三:对接收线圈的矩形进行编号,单片机记录采集感应电压的时序,接收线圈的编号从小到大产生感应电压,则可判断此时的旋转方向为正转,反之,则为反转;
[0024]
步骤四:当待测轴静止时,轴输入端和轴输出端位于相同编号内的接受线圈内部,两端的接收线圈参数一致,采集到的信号重叠,当待测轴转动时,轴输入端和轴输出端的信号产生相位差,通过计算轴输出端的信号延迟,得到待测轴的形变角;
[0025]
步骤五:根据下列公式计算扭矩,
[0026][0027]
式中:θ为待测轴的扭转角;t为负载扭矩;l为扭杆有效长度;g为扭杆材料剪切模量;i
p
为扭杆截面极惯性矩。
[0028]
与现有技术相比,本发明的有益效果是:本发明解决了现有传感器无法同时测量转速和扭矩,且结构复杂的问题。磁聚焦技术凭借抗干扰能力强、信号强度大、无漏磁、能量传输效率高等优点,在生物电磁学、地质勘测领域发展迅速。本发明利用永磁体的圆锥形状,聚焦磁场,以此取代激励线圈,由于激励磁场是由永磁体产生的恒定磁场,故改变接收
线圈的匝数,达到产生感应电动势的目的。
[0029]
本发明的传感器内部只存在永磁体产生的磁场,无需解构。以接受线圈为转子,简化了数据传输的难度,通过可变匝数,使接收线圈与永磁体啮合后就有感应电压,且增强了信号强度。本发明的磁场聚焦于一点,提取的信号是高低电平形式,算法简单,精度高,且本发明可以同时测量转速和扭矩。
附图说明
[0030]
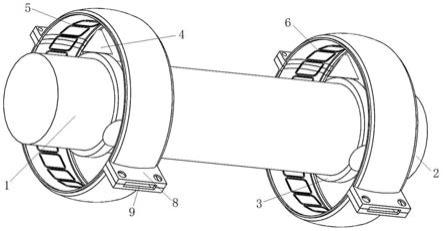
图1为本发明所述的一种可变匝数的磁聚焦式传感器整体结构示意图;
[0031]
图2为本发明所述的一种可变匝数的磁聚焦式传感器爆炸结构示意图;
[0032]
图3为本发明所述的罩壳结构示意图;
[0033]
图4为本发明所述的接收线圈结构示意图;
[0034]
图5为本发明所述的永磁体安装结构示意图;
[0035]
图6为本发明所述的待测轴静止时的扭矩信号脉冲图;
[0036]
图7为本发明所述的受扭力作用时的扭矩信号脉冲图。
[0037]
1-轴输入端,2-轴输出端,3-固定环,4-永磁体,5-第一接收线圈,6-第二接收线圈,7-罩壳,8-把手,9-线束出口,10-电路板固定面,11-接收线圈固定面,12-固定孔,13-电压引脚。
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地阐述。
[0039]
参见图1-7说明本实施方式,一种可变匝数的磁聚焦式传感器,它包括待测轴和采集机构,所述待测轴两端分别为轴输入端1和轴输出端2,所述采集机构分别设置在轴输入端1和轴输出端2处,所述采集机构包括固定环3、永磁体4、接收线圈和罩壳7,所述固定环3内圈与待测轴相连,外圈与永磁体4相连,所述永磁体4数量为多个,多个永磁体4沿固定环3圆周方向均布,所述永磁体4为锥形结构,所述接收线圈包括若干个矩形线圈,若干个矩形线圈弯依次弯曲环绕排列成圆周状,设置在轴输入端1处的为第一接收线圈5,设置在轴输出端2处的为第二接收线圈6,每个矩形线圈的匝数均为多匝,其中10匝始终保持通路,其余匝数通过开关与单片机相连,所述接收线圈印制在定子柔性电路板上,所述定子柔性电路板数量为多个,每个定子柔性电路板上均印制一个接收线圈,多个定子柔性电路板层层叠加,所述定子柔性电路板固定连接在罩壳7的接收线圈固定面11上,所述罩壳7的把手8内部设置有定子处理电路。
[0040]
本实施例所述永磁体4数量为三个,所述接收线圈包括24个矩形线圈,所述把手8侧面开设有线束出口9,所述矩形线圈通过电压引脚13与开关和单片机相连,所述罩壳7为分体结构,把手8上开设有固定孔12,通过固定螺钉将分体罩壳7相连,定子处理电路设置在把手8的电路板固定面10上。
[0041]
在待测轴周围布置三个圆锥形状的永磁体4,锥形的永磁体4的磁场发散较小,可使磁场最大限度的聚集在接收线圈内部。锥形的永磁体4的磁力线会在待测轴附近汇集,聚焦成一个磁斑,此处为磁场聚集处,且是待测轴表面的磁场最大处。锥形永磁体4通过永固
定环3固定于待测轴表面,使之随待测轴一起转动,如图5所示。采用24个排列紧密的矩形弯曲成圆周形状,组成接收线圈。矩形线圈匝数可变,具体为:有10匝一直保持通路,其余匝数通过开关与单片机相连,由单片机控制其通断。接收线圈印制在定子柔性电路板上,每层印制一个矩形接收线圈,若干层的定子柔性电路板层层叠加。定子柔性电路板固定于罩壳7的接收线圈固定面11,如图4所示。定子处理电路放置于罩壳7的把手8内部。罩壳7、接收线圈和定子处理电路共同组成传感器的定子。
[0042]
安装时,将含有接收线圈的柔性电路板固定于罩壳7内部,定子处理电路位于把手8内部,把手8上有线束出口9,引出导线。通过拧紧定子固定孔12的螺丝,固定定子柔性电路板和定子处理电路。锥形永磁体4通过永磁体3固定环固定于待测轴表面。
[0043]
本实施例为一种使用可变匝数的磁聚焦式传感器的转速计算方法,它包括以下步骤:
[0044]
步骤一:空间磁场由永磁体4产生,通过设计永磁体4的尺寸和固定环3的厚度,使磁场聚焦于待测轴上一点,该点为磁聚焦点,所述磁聚焦点位于接收线圈矩形内部;
[0045]
步骤二:随着待测轴的转动,所述磁聚焦点的轨迹是圆,磁聚焦点在接收线圈矩形内部时,由于接收线圈内部的磁通量改变,接收线圈上产生感应电压,感应电压的大小与永磁体4和接收线圈的耦合面积有关,当永磁体4位于接收线圈内部且静止时,接收线圈的感应电压为零;
[0046]
步骤三:对接收线圈的矩形进行编号,单片机记录采集感应电压的时序,接收线圈的编号从小到大产生感应电压,则可判断此时的旋转方向为正转,反之,则为反转;
[0047]
步骤四:磁聚焦点转动到接收线圈内部的过程中,根据公式:
[0048][0049]
式中:b为磁感应强度;n为接收线圈的匝数;s为矩形的面积;u为接收线圈的感应电压,t为时间,φ为磁通量,由公式可知,b一定的情况下,一定时间内,感应电压与s成正比,s的变化,导致u的变化;
[0050]
步骤五:单片机通过采集接收线圈的电压值,判断具体哪个接收线圈有电压,当该线圈的电压为零时,通过单片机控制该接收线圈的匝数开关,使n产生变化,进而使接收线圈继续产生感应电压,控制匝数n的开关,还可以增强感应电压的信号强度,强度越大,抵御干扰的能力越强;
[0051]
步骤六:当永磁体4位于接收线圈两个矩形线圈之间时,感应电压恒为零,此时单片机采集到的电压为低电平。通过记录低电平的间隔时间,计算待测轴的转速。
[0052]
本实施例为一种使用可变匝数的磁聚焦式传感器的扭矩计算方法,它包括以下步骤:
[0053]
步骤一:空间磁场由永磁体4产生,通过设计永磁体4的尺寸和固定环3的厚度,使磁场聚焦于待测轴上一点,该点为磁聚焦点,所述磁聚焦点位于接收线圈矩形内部;
[0054]
步骤二:随着待测轴的转动,所述磁聚焦点的轨迹是圆,磁聚焦点在接收线圈矩形内部时,由于接收线圈内部的磁通量改变,接收线圈上产生感应电压,感应电压的大小与永磁体4和接收线圈的耦合面积有关,当永磁体4位于接收线圈内部且不转动时,接收线圈的感应电压为零;
[0055]
步骤三:对接收线圈的矩形进行编号,单片机记录采集感应电压的时序,接收线圈的编号从小到大产生感应电压,则可判断此时的旋转方向为正转,反之,则为反转;
[0056]
步骤四:当待测轴静止时,轴输入端1和轴输出端2位于相同编号内的接受线圈内部,两端的接收线圈参数一致,采集到的信号重叠,如图6所示,当待测轴转动时,轴输入端1和轴输出端2的信号产生相位差,如图7所示,实线为轴输入端1的信号,虚线为轴输出端2信号,通过计算轴输出端2的信号延迟,得到待测轴的形变角;
[0057]
步骤五:根据下列公式计算扭矩,
[0058][0059]
式中:θ为待测轴的扭转角;t为负载扭矩;l为扭杆有效长度;g为扭杆材料剪切模量;i
p
为扭杆截面极惯性矩。
[0060]
以上对本发明所提供的一种可变匝数的磁聚焦式传感器及转速、扭矩计算方法,进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。