1.本发明涉及一种水带接头及自动对接方法,尤其涉及一种消防机器人水带接头及自动对接方法,属于消防装备技术领域。
背景技术:
2.近年来我国特大火灾事件频发,随着安全技术装备的不断发展,越来越多的消防机器人被投入应用到消防作业中。然而在现有技术下,消防机器人还普遍采用人工遥控操作的控制方式,机载消防供水带与消防栓对接还采用人工方式,此外,传统的消防水带接头不便于使用机械手夹持,大大约束了消防应急响应的时效性。
3.因此,需要设计一种便于机械手夹持的消防水带接头及自动对接方法,以解决现有技术中消防水带接头不便于夹持的技术问题。
技术实现要素:
4.本发明的目的在于克服现有技术中消防水带接头不便于夹持的不足,提供一种消防机器人水带接头、消防机器人及自动对接方法,技术方案如下:一种消防机器人水带接头,包括接头本体、夹座安装板、接头夹座,接头本体包括相互贯通的水管连接部和消防栓对接部,消防栓对接部的一侧端面沿周向设置环形凹槽,环形凹槽内部设置多个用以卡接消防栓的卡头,消防栓对接部另一侧设置夹座安装板;夹座安装板上固定设置接头夹座;接头夹座包括固定连接的固定部和夹持部,固定部与夹座安装板固定。
5.进一步地,夹持部为开设在夹持部周侧面上的开槽。
6.优选地,开槽为多个,多个开槽沿周侧面均匀设置。
7.一种消防机器人,包括图像采集装置、机械手臂、接头抓手和前述的消防机器人水带接头;接头抓手一端与接头夹座固定,另一端与机械手臂铰接。
8.进一步地,机械手臂端部设有转动轴,转动轴上套设固定台,固定台上设置转动台,转动台上转动地设置接头抓手。
9.进一步地,图像采集装置设置在接头抓手端部。
10.一种消防机器人水带接头的自动对接方法,包括以下步骤:获取消防栓所处目标位置的图像信息;基于图像信息,得到消防栓接头位姿;基于消防栓接头位姿,通过相机手眼标定转换为目标位置的物理位姿;基于物理位姿驱动机械手臂转动,将气动夹爪夹持水带接头至消防栓所处目标位置,通过图像信息判断消防栓门是否打开。如果栓门未打开,可以选择驱动机械手臂打开消防栓门或者击碎栓门玻璃;栓门打开,控制机械手臂转动使消防水带接头与消防栓内的接头对准;
控制并驱动机械手臂,使得消防水带接头相对于消防栓接头逆时针转动90
°
,旋紧接头,完成对接。
11.与现有技术相比,本发明所达到的有益效果:本发明有效的简化了消防水带与消防栓对接的方式,实现快速便捷式对接,保障了消防员的人身安全,提高了消防机器人的智能化与消防应急响应的时效性。
附图说明
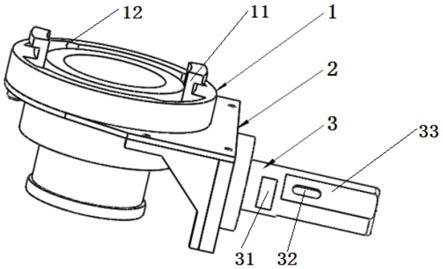
12.图1为本发明的消防水带接头的立体结构图;图2为本发明的消防水带接头的侧视图;图3为本发明的自动对接方法示意图;图中:1-接头本体、11-卡头、12-环形凹槽、2-接头夹座安装板、3-接头夹座、31-卡口、32-键槽、33-平面、4-水带、5-气动夹爪、6-相机、7-机械手臂。
具体实施方式
13.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
14.实施例1一种消防机器人水带接头,包括接头本体1、夹座安装板2、接头夹座3,接头本体1包括相互贯通的水管连接部和消防栓对接部,消防栓对接部的一侧端面沿周向设置环形凹槽12,环形凹槽12内部设置多个用以卡接消防栓的卡头11,消防栓对接部另一侧设置夹座安装板2;夹座安装板2上固定设置接头夹座3;接头夹座3包括固定连接的固定部和夹持部,固定部与夹座安装板2固定。本实施例中夹座安装板2通过螺栓连接固定在接头本体1上,夹座安装板2用以连接接头本体1和接头夹座3。
15.本实施例中,夹持部为开设在夹持部周侧面上的开槽。开槽为环形键槽32。
16.本实施例中作为优选方式,开槽为多个,多个开槽沿周侧面均匀设置。
17.具体地,水管连接部为设置在接头本体1端面上的用于外接水管的圆台,本实施例中具体地,接头抓座安装板设置在垂直于接头本体1中轴线的平面33上,接头抓座安装板与接头本体1通过螺栓固联,接头夹座3上沿圆周方向均匀布置3个平面33,平面33上开设键槽32,接头夹座3上靠近接头安装座的一端设置卡口31,平面33的设置便于机械手末端的机械夹爪夹持。
18.实施例2一种消防机器人,包括图像采集装置、机械手臂7、接头抓手和前述的消防机器人水带4接头;接头抓手一端与接头夹座3固定,另一端与机械手臂7铰接。
19.本实施例中具体地,机械手臂7端部设有转动轴,转动轴上套设固定台,固定台上设置转动台,转动台上转动地设置接头抓手。
20.本实施例中具体地,图像采集装置设置在接头抓手端部。
21.实施例3
一种消防机器人水带4接头的自动对接方法,包括以下步骤:获取消防栓所处目标位置的图像信息;基于图像信息,得到消防栓接头位姿;基于消防栓接头位姿,通过相机6手眼标定转换为目标位置的物理位姿;基于物理位姿驱动机械手臂7转动,将气动夹爪5夹持水带4接头至消防栓所处目标位置,判断消防栓门是否打开。如果栓门未打开,可以选择驱动机械手臂7打开消防栓门或者击碎栓门玻璃;栓门打开,控制机械手臂7转动使消防水带4接头与消防栓内的接头对准;控制并驱动机械手臂7,使得消防水带4接头相对于消防栓接头逆时针转动90
°
,旋紧接头,完成对接。
22.本发明的消防机器人水带4接头及消防机器人能实现快速便捷式对接消防栓接头,解决人工对接水带4的繁琐与不便,减少消防员直接参与,降低消防员人身危险。本发明的自动对接方法简化了对接方式,提高消防机器人的智能化与消防应急响应的时效性。
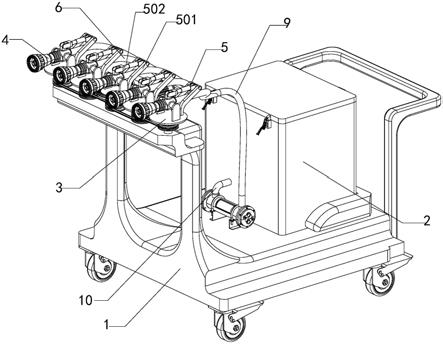
23.如图3所示的本发明的自动对接方法示意图,具体使用方法如下:首先消防机器人通过机载的激光雷达、可见光相机6等传感器,自主导航运动到消防栓附近,此时,驱动机械手臂7,使消防栓位于机械手臂7末端的相机67视野中,通过安装在机械手末端的相机6采集消防栓内的图像;对相机6采集到的图像进行分析与处理,得到消防栓接头的位姿;通过视觉伺服的方法驱动机械手臂7,利用气动夹爪5夹持消防机器人水带4接头夹座3,带动接头动作;通过图像信息判断消防栓门是否打开。如果栓门未打开,可以选择驱动机械手臂7打开消防栓门或者击碎栓门玻璃;然后,计算出图像中的消防栓接头位姿,通过相机6手眼标定转换为物理位姿,驱动机械手臂7夹持上述的一种快速便携式对接的消防水带4接头5对准并插入消防栓内的接头;待消防机器人水带4接头对准并插入消防栓接头,最后,驱动机械手臂7,使得接头5沿贴合面逆时针转动90
°
,旋紧接头,完成对接。
24.消防水带4接头的一侧设计有接头夹座3,便于机械手末端的气动夹爪5抓持,且在对接过程中,便于机械手动作以旋紧接头。
25.本发明有效的简化了消防水带4与消防栓对接的方式,实现快速便捷式对接,保障了消防员的人身安全,提高了消防机器人的智能化与消防应急响应的时效性。
26.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。