技术特征:
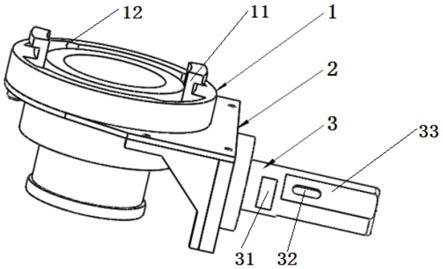
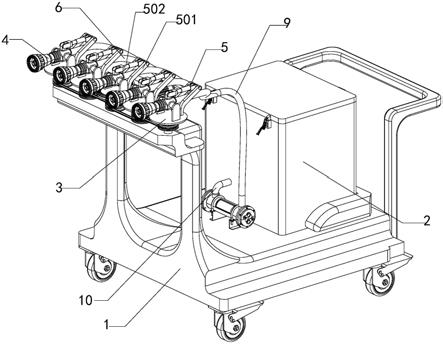
1.一种消防机器人水带接头,其特征在于,包括接头本体、夹座安装板、接头夹座,所述接头本体包括相互贯通的水管连接部和消防栓对接部,所述消防栓对接部的一侧端面沿周向设置环形凹槽,所述环形凹槽内部设置多个用以卡接消防栓的卡头,所述消防栓对接部另一侧设置所述夹座安装板;所述夹座安装板上固定设置所述接头夹座;所述接头夹座包括固定连接的固定部和夹持部,所述固定部与所述夹座安装板固定。2.根据权利要求1所述的消防机器人水带接头,其特征在于,所述夹持部为开设在夹持部周侧面上的开槽。3.根据权利要求2所述的消防机器人水带接头,其特征在于,所述开槽为多个,多个所述开槽沿周侧面均匀设置。4.一种消防机器人,其特征在于,包括图像采集装置、机械手臂、接头抓手和权利要求1至3中任一项所述的消防机器人水带接头;所述接头抓手一端与所述接头夹座固定,另一端与所述机械手臂铰接。5.根据权利要求4所述的消防机器人,其特征在于,所述机械手臂端部设有转动轴,所述转动轴上套设固定台,所述固定台上设置转动台,所述转动台上转动地设置所述接头抓手。6.根据权利要求4所述的消防机器人,其特征在于,所述图像采集装置设置在所述接头抓手端部。7.一种消防机器人水带接头的自动对接方法,其特征在于,包括以下步骤:获取消防栓所处目标位置的图像信息;基于所述图像信息,得到消防栓接头位姿;基于所述消防栓接头位姿,通过相机手眼标定转换为目标位置的物理位姿;基于所述物理位姿驱动所述机械手臂转动,将所述气动夹爪夹持所述水带接头至消防栓所处目标位置,通过所述图像信息判断消防栓门是否打开,如果栓门未打开,可以选择驱动机械手臂打开消防栓门或者击碎栓门玻璃;栓门打开,控制所述机械手臂转动使所述消防水带接头与消防栓内的接头对准;控制并驱动所述机械手臂,使得所述消防水带接头相对于所述消防栓接头逆时针转动90
°
,旋紧接头,完成对接。
技术总结
本发明公开了一种消防机器人水带接头,包括接头本体、夹座安装板、接头夹座,接头本体包括相互贯通的水管连接部和消防栓对接部,消防栓对接部的一侧端面沿周向设置环形凹槽,环形凹槽内部设置多个用以卡接消防栓的卡头,消防栓对接部另一侧设置夹座安装板;夹座安装板上固定设置接头夹座;接头夹座包括固定连接的固定部和夹持部,固定部与夹座安装板固定。夹持部为开设在夹持部周侧面上的开槽。一种消防机器人,包括图像采集装置、机械手臂、接头抓手和前述的消防机器人水带接头;接头抓手一端与接头夹座固定,另一端与机械手臂铰接。本发明实现了快速便捷式对接,保障了消防员的人身安全,提高了消防机器人的智能化与消防应急响应的时效性。的时效性。的时效性。
技术研发人员:奚建东 刘波 王婷婷 施舜锴 毕衍赟 李奎 廖华丽
受保护的技术使用者:河海大学常州校区
技术研发日:2020.08.26
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。