1.本发明属于激光刻蚀设备领域,涉及一种三轴装置。
背景技术:
2.三轴装置的主要功能是在行程范围内,该装置可在x方向、y方向、z方向进行运动控制,以满足工艺需要的要求。
3.在实现本发明过程中,发明人发现现有技术中至少存在如下技术问题中的一个问题:
4.1、就现目前的情况来看,市场上对于通过激光扫描增加导电银浆导通性的装置还比较少,大部分装置都是属于临时搭建,不具有三轴灵活扫描的特点。
5.2、需要投入人力进行实时看护扫描。
6.3、对于装置的控制系统处于非常简单的状态,需要人近距离操作装置。
7.对于一些其它用途的激光扫描器,也不具有三轴精确灵活控制及远程操作等优点。
技术实现要素:
8.鉴于此,本发明目的在于提供一种三轴精确灵活控制的三轴装置。本发明进一步的目的在于提供一种可远程操作的三轴装置。
9.发明人通过长期的探索和尝试,以及多次的实验和努力,不断的改革创新,为解决以上技术问题,本发明提供的技术方案是,提供一种远程激光刻蚀三轴装置,包括安装于扫描平台上的x轴模块和z轴模块,z轴模块上安装有y轴模块,所述y轴模块通过第三传动机构与所述z轴模块连接;所述x轴模块上安装有载物工作台,所述载物工作台通过第一传动机构与x轴模块连接;所述y轴模块上安装有激光发射器,所述激光发射器通过第二传动机构与所述y轴模块连接;所述第一传动机构、所述第二传动机构和所述第三传动机构分别连接有电机,所述电机连接有集成控制模块,所述集成控制模块连接有网络io继电器,所述网络io继电器信号连接上位机。
10.根据本发明远程激光刻蚀三轴装置的一个实施方式,所述第一传动机构为丝杠传动机构,所述第二传动机构为丝杠传动机构,第三传动机构为丝杠传动机构。
11.根据本发明远程激光刻蚀三轴装置的一个实施方式,所述丝杠传动机构为滚珠丝杠。
12.根据本发明远程激光刻蚀三轴装置的一个实施方式,所述激光发射器连接有激光能量控制器,所述激光能量控制器与所述网络io继电器连接。
13.根据本发明远程激光刻蚀三轴装置的一个实施方式,所述网络io继电器为wifi控制器。
14.根据本发明远程激光刻蚀三轴装置的一个实施方式,所述丝杆传动机构包括丝杠轴和螺母;所述x轴模块包括第一支架,第一传动机构的丝杠轴通过轴承装配在第一支架
上,所述载物工作台安装在第一传动机构的螺母上;
15.所述y轴模块包括第二支架,第二传动机构的丝杠轴通过轴承装配在第二支架上,所述激光发射器安装在第二传动机构的螺母上;
16.所述z轴模块包括第三支架,第三传动机构的丝杠轴通过轴承装配在第三支架上,所述第二支架安装在第三传动机构的螺母上。
17.根据本发明远程激光刻蚀三轴装置的一个实施方式,所述z轴模块为两个,所述第二支架安装在两个第三支架之间。
18.根据本发明远程激光刻蚀三轴装置的一个实施方式,所述第一支架上设置有第一导轨,所述第一传动机构的螺母与第一导轨滑动配合;所述第二支架上设置有第二导轨,所述第二传动机构的螺母与第二导轨滑动配合。
19.根据本发明远程激光刻蚀三轴装置的一个实施方式,所述激光发射器包括氪氟激光发射器、氙氯激光发射器、氮激光发射器、氩激光发射器、氩激光发射器、氦氖激光发射器、氦氖激光发射器中的一种或多种。
20.与现有技术相比,上述技术方案中的一个技术方案具有如下优点:
21.a)根据本发明三轴装置的一个实施方式,在三个轴方向上均有自身动力输入进行控制,可进行精确定位三轴位置。
22.b)本发明三轴装置的一个实施方式,可以达到精确控制激光的强度、控扫描速度、扫描时间等参数的目的;同时,远程控制的目的是大幅度减少操作人员直接暴露在激光中的几率,以减少激光对于操作人员眼部的损害。
23.c)本发明三轴装置的一个实施方式,进行搭配激光处理器对导电银浆进行激光扫描处理,能够应用于pcb板表层丝印银浆导通性提高、重复性激光扫描切割及其他激光扫描等领域。
24.d)本发明三轴装置的一个实施方式,有利于提高导电银浆激光扫描工艺能够稳定可控,以达到控制光的强度,控扫描速度的目标。
25.e)本发明三轴装置的一个实施方式,使用三轴的精确控制,能够极大实现运动的可控制化,也实现了工艺过程可数据化,使得整个激光扫描导电银浆工艺在对特定产品进行工艺细节探索时能够清晰快速的寻找到工艺最优点,规避了人手持带来的扫描不均及数据模糊的缺点,使得工艺参数可靠性更高。
26.f)本发明三轴装置的一个实施方式,设计集成控制器配合网络io继电器,就可实现远程控制。集成控制器将所有控制内容集成在控制器内部,网络io继电器通过ip通讯和集成控制器的配合就能实现所有操作的远程化,大大提高操作的集成化和简洁性,更重要的是极大降低了操作人员接触激光的几率,保证了操作人员的健康。
附图说明
27.为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
28.图1是本发明三轴装置一较佳实施例的前视示意图。
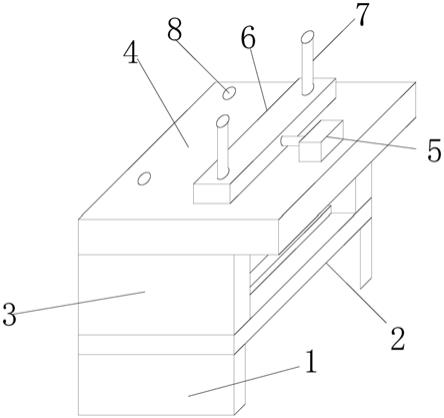
29.图2是图1的立体结构示意图。
30.图3是本发明三轴装置控制系统示意图。
31.图中标记分别为:
32.100扫描平台,
33.110x轴模块,
34.111第一传动机构,
35.112载物工作台,
36.113第一支架,
37.120y轴模块,
38.121第二传动机构,
39.122激光发射器,
40.123第二支架,
41.130z轴模块,
42.131第三传动机构,
43.132第三支架,
44.210上位机,
45.220网络io继电器,
46.231集成控制模块,
47.232激光能量控制器。
具体实施方式
48.下面结合附图与一个具体实施例进行说明。
49.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。
50.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中可以不对其进行进一步定义和解释。
51.pcb板表层丝印银浆,提高导电银浆导电性的主流技术方案还是人员手持激光器进行扫描工艺,缺点就是对于整个工艺来讲,不能达到精确控制激光强度、扫描时间、扫描速度等参数的目的;人员的近距离接触也增大了激光对人眼的伤害;在整个激光行业中,如cn201920844109.1一种激光扫描装置的调节装置所描述,激光扫描装置还处于只可近距离操作及调节激光功率大小等以配合完成工艺,但装置本身不具有灵活性,不能实现三轴的灵活控制,且操作人员不能进行远程操作,只能够使用劳保用品进行保护操作。本实施例中的远程激光刻蚀三轴装置,可以解决现有技术中的这些问题。
52.本发明中,x轴、y轴、z轴分别代表空间直角坐标系中的横轴、纵轴和竖轴。
53.参见图1至图3。本实施例所描述的远程激光刻蚀三轴装置,包括安装于扫描平台
100上的x轴模块110和z轴模块130,z轴模块130上安装有y轴模块120,所述y轴模块120通过第三传动机构131与所述z轴模块130连接。x轴模块是横向设置的模块,y轴模块是纵向设置的模块,z轴模块是竖向设置的模块。
54.参见图1,所述x轴模块110上安装有载物工作台112,所述载物工作台112通过第一传动机构111与x轴模块110连接;所述y轴模块120上安装有激光发射器122,所述激光发射器122通过第二传动机构121与所述y轴模块120连接。
55.三轴装置的主要功能是在行程范围内,在x方向、y方向、z方向均使用传动机构进行精确运动控制。本实施例中,所述第一传动机构111为丝杠传动机构,所述第二传动机构121为丝杠传动机构,第三传动机构131为丝杠传动机构。
56.本实施例中,所述丝杠传动机构为滚珠丝杠。滚珠丝杠由螺杆、螺母、钢球、预压片、反向器、防尘器组成。它的功能是将旋转运动转化成直线运动,这是艾克姆螺杆的进一步延伸和发展。
57.当然,传动机构不仅限于滚柱丝杠,也不仅限于丝杠,还可以是其它直线往复运动的机构。本实施例中,是以丝杠机构特别是滚珠丝杠为例进行说明。滚珠丝杠具有高精度、可逆性和高效率的特点。经验证,本发明三轴装置位置精度误差为0.1mm以下,速度精度0.1mm/s以下。
58.参见图1和图2,所述丝杆传动机构包括丝杠轴和螺母;所述x轴模块110包括第一支架113,第一传动机构111的丝杠轴通过轴承装配在第一支架113上,所述载物工作台112安装在第一传动机构111的螺母上。
59.在x方向上,滚珠丝杠上搭载载物工作台112进行往复运动,作为x方向上的运动。应当理解的是,滚珠丝杠中,螺母在丝杠轴上直线运动,需要额外的部件对螺母进行约束,避免螺母转动,这样在丝杠轴转动过程中,螺母才能做直线运动,载物工作台112才能在x轴线上运动。为了约束螺母转动,可以在第一支架113上设置有第一导轨(图中未示出),所述第一传动机构111的螺母与第一导轨滑动配合。当然,也可以直接在第一支架113上直接构建出第一导轨。
60.同时还应当理解的是,因为载物工作台112安装在第一传动机构111的螺母上,对第一传动机构螺母的运动约束也是对载物工作台112的运动约束,反之,对载物工作台112进行运动约束也可以对第一传动机构螺母进行运动约束,也就是说,载物工作台112也可以与第一导轨滑动配合,确保载物工作台112在x轴模块110上沿x轴平稳地直线往复运动是核心目的。
61.所述y轴模块120包括第二支架123,第二传动机构121的丝杠轴通过轴承装配在第二支架123上,所述激光发射器122安装在第二传动机构121的螺母上。
62.所述激光发射器122包括氪氟激光发射器、氙氯激光发射器、氮激光发射器、氩激光发射器、氩激光发射器、氦氖激光发射器、氦氖激光发射器中的一种或多种。激光发射器122发射的激光包括氪氟激光(紫外光248nm)、氙氯激光(紫外光308nm)、氮激光(紫外光337nm)、氩激光(蓝光488nm)、氩激光(绿光514)nm、氦氖激光(绿光543nm)、氦氖激光(红光633nm)等不同波长的激光。本发明未对激光发射器本身做改进,而是将现有的激光发射器整合在远程激光刻蚀三轴装置中,以实现pcb板表层丝印银浆工艺中,对激光进行精确控制,甚至是远程控制。在更加具体的实施方式中,本实施例中激光发射器参数选择为:能量
功率范围0-5w,最小激光能量功率控制精度50mw。
63.y轴模块120位于x轴模块110的正上方,激光发射器122发射的激光,作用于载物工作台112上的pcb板,对pcb板上的导电银浆进行激光扫描处理,提高pcb板表层丝印银浆的导通性。当然,也可以用于对载物工作台上的工件做重复性激光扫描切割及其他激光扫描。
64.激光发射器122的运动约束与载物工作台112的运动约束相同,通过在第二支架123上设置有第二导轨或者直接在第二支架123上构建出第二导轨,对第二传动机构121螺母或激光发射器122进行运动约束,确保激光发射器122只能在y轴模块120上沿y轴方向直线往复运动。
65.y轴模块120是通过z轴模块130作为支架安装在x轴模块110上方的。本实施例中,所述z轴模块120为两个,分别安装在x轴模块的两侧。所述z轴模块130包括第三支架132,第三传动机构131的丝杠轴通过轴承装配在第三支架132上,所述第二支架123安装在第三传动机构131的螺母上。参照图1,第二支架123的左端与左侧z轴模块120上的螺母连接,第二支架123的右端与右侧z轴模块120上的螺母连接,第二支架123安装在两个第三支架132之间。
66.参见图3。所述第一传动机构111、所述第二传动机构121和所述第三传动机构131分别连接有电机,具体来说,x轴模块中的丝杠轴直接或间接连接第一电机的动力输出轴,y轴模块中的丝杠轴直接或间接连接第二电机的动力输出轴,z轴模块中的丝杠轴直接或间接连接第三电机的动力输出轴。所述电机的控制线全部集成连接到集成控制模块231,集成控制模块231是通过继电器信号实现对所有轴进行运动控制的模块。所述集成控制模块231连接有网络io继电器220,所述激光发射器122连接有激光能量控制器232,所述激光能量控制器232与所述网络io继电器220连接。网络io继电器220是通过ip协议实现上位机和控制系统的远程控制的模块。本实施例中,网络io继电器220为wifi控制器。所述网络io继电器220通过ip协议和上位机210等进行相互通讯。集成控制器配合网络io继电器,就可实现远程控制。集成控制器将所有控制内容集成在控制器内部,网络io继电器通过ip通讯和集成控制器的配合就实现所有操作的远程化,大大提高操作的集成化和简洁性,更重要的是极大降低了操作人员接触激光的几率,保证了操作人员的健康。
67.在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
68.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
69.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
70.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
71.以上仅是本发明的优选实施方式,应当指出的是,上述优选实施方式不应视为对本发明的限制,本发明的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本发明的精神和范围内,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。