1.本发明涉及光学手术导航的技术领域,尤其是指一种基于光学定位仪的兼容少量标记点丢失的工具识别方法。
背景技术:
2.光学导航技术是利用物理光学测量的方式来检测光学导航装置和待检测物体之间的相对位置关系,在航天、医疗、工业等领域有着广泛的应用。且随着现代医学影像技术的飞跃发展为疾病的诊断和治疗带来了极大的帮助。以医学影像为基础和以光学定位仪为核心组件的手术导航系统,可视化手术工具和患者特征结构的在实际空间中的位置关系来帮助医生进行手术,在手术精度、手术消耗时间、手术创伤、术后疗效等方面提供了极大的帮助,也因此成为更多与时俱进的外科手术医生的选择。
3.手术导航系统对手术工具、病人的定位较常用的方式是基于标记点的点集匹配的方式,即定位仪识别到工具上或粘贴在病人皮肤表面的外部标记点并获取其三维坐标,再求取定位仪坐标系和工具或病人坐标系的相对位置关系的方式来进行实时定位的。本发明所提及的工具是指在外科手术尤其肿瘤消融手术过程中,用来在术前确定手术穿刺针的针尖在定位仪坐标系的位置。但在真实实验或手术过程中会出现因误操作导致标记点掉落或遮挡使得定位仪无法识别全部标记点,从而影响定位或导航精度,甚至会导致手术期间导航无法持续提供服务影响手术进行的问题。
技术实现要素:
4.本发明的目的在于克服现有技术的缺点与不足,提出了一种基于光学定位仪的兼容少量标记点丢失的工具识别方法,该方法可实现利用光学定位仪对某给定工具的识别,该方法不仅能做到在工具上所有标记点都存在且未被遮挡情况下的工具识别,且能做到在过程中若出现工具上少量标记点丢失或遮挡的情况仍能完成对该工具的识别。同时,该方法的算法实现部分逻辑简单易于理解。
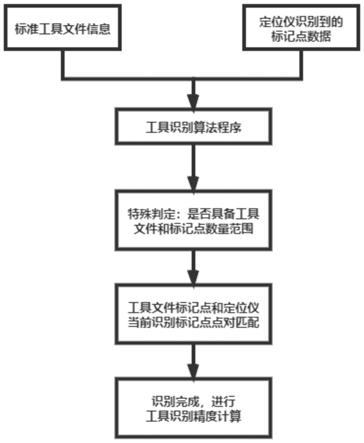
5.为实现上述目的,本发明所提供的技术方案为:基于光学定位仪的兼容少量标记点丢失的工具识别方法,包括以下步骤:
6.1)使用光学定位仪获取待识别工具的基础信息,包括:标准工具文件信息及能够被光学定位仪识别到的标记点的三维坐标;
7.2)利用上述基础信息先进行工具识别的特殊判定:须先具备该工具出厂时的标准工具文件,以及当标记点少于3个或大于200个时提前终止识别;
8.3)对标准工具文件中的标记点点集和光学定位仪识别到的标记点点集做点对匹配,当匹配完成后的点对个数不小于当前定位仪能够识别到的标记点个数时表示识别成功;
9.4)对匹配的结果做工具识别精度计算,并输出本次识别完成的工具信息。
10.进一步,在步骤1)中,所述标准工具文件信息是指工具出厂时配备的信息,包含工
具名称、工具上反光标记球的个数和标记点在工具坐标系下的三维坐标点集。
11.进一步,在步骤2)中,利用步骤1)的基础信息对工具识别先做的特殊判定包含以下三种,不符合的将不再继续当前识别并直接提示无法识别当前工具:
12.a、待识别工具的标准工具文件要具备:工具出厂时已被制作,但需放入工具识别工程下;
13.b、待识别工具的标记点个数和光学定位仪识别到的标记点个数均不能少于3个:三维物体在空间中位置的确定基于至少三个非共线点的特点,即至少要有3个标记球才能完成识别,否则将无法进行平面的拟合;
14.c、待识别工具的标记点个数和光学定位仪识别到的标记点个数均不能大于200个:大于200个将超过光学定位仪的双目相机能识别到的最大点数。
15.进一步,在步骤3)中,对工具文件中的标记点点集和定位仪识别到的标记点点集做点对匹配,包括以下步骤:
16.3.1)计算工具文件上的标记点sj到点集s={sj|j=1,2,3,...,8}中其它标记点的距离记为一维矩阵其中j是工具文件中标记点的初始序号,将点集s的所有记为m维距离矩阵mats;同理,计算光学定位仪识别到的标记点oi到点集o中其它标记点的距离其中i是光学定位仪识别到的标记点的初始序号点集o={oi|i=1,2,3,...,8}的所有记为n维距离矩阵mato;
17.3.2)遍历步骤3.1)计算出的工具文件的距离矩阵mats,以遍历得到的点sj的距离为基准,用于与光学定位仪采集点的距离mato进行匹配计数,具体如下:
18.3.2.1)第一次配对:遍历光学定位仪的距离矩阵mato,得到每个点oi的距离将当前点oi的距离和步骤3.2)中的点sj的做比较,当的每个距离都和的距离匹配上时,则记作在点集o中查找到oi能匹配上的sj;此时用数组numj保存当前点sj的索引indexj和数组nmi记录当前oi的索引indexi,用数组numj′
和numi′
保存在点集s和o中未配对成功的点索引,同时保存和当前点oi做距离计算的点集o中的其它点ok记为点集o
′
={ok|k≠i,i=1,2,3,...,8,k=1,2,3,...,8},k为点的序号,同理,保存和当前点sj做距离计算的点集s中的其它点s
p
记为点集s
′
={s
p
|p≠j,j=1,2,3,...,8,p=1,2,3,...,8},p为点的序号;其中,对能匹配上的距离定义为点距差的绝对值小于0.15mm;
19.3.2.2)对所得点集o
′
和s
′
重复做步骤3.2.1)的操作,不断减少点集里的点数量进行匹配,当o
′
中的点为空时则结束循环;
20.3.3)第二次点集配对:对步骤3.2)所得索引数组numj和numi重复做步骤3.2)的逻辑处理,即对已经配对的点再做一次确认是否有点对未匹配上;如果有未匹配上的,则将该点的索引从对应索引数组中删除且记录该点索引并添加入未配对数组numj′
或numi′
中;
21.3.4)第三次点集配对:对未配对成功点重复做步骤3.2)的逻辑处理,即对前两次未匹配成功的点再次匹配;当最终匹配完成后的点对个数不小于当前光学定位仪能够识别到的标记点个数时表示识别成功。
22.进一步,在步骤4)中,对匹配的结果做工具识别精度计算,并输出本次识别完成的工具信息,包含以下步骤:
23.4.1)将点集o和s经过步骤3)完成配对后分别获得的两个点集o2和s2作为点迭代算
法icp的输入;经过icp的核心计算,即基于最小二乘法的最优匹配法计算的结果,即为两个点集的刚性匹配变换矩阵(r,t)作为输出,其中,r为旋转变换矩阵,t为平移变化矩阵;
24.4.2)利用步骤4.1)计算得到的矩阵(r,t),对完成配对后的点集o2中的每个点做旋转和平移变化得到变化后的点集o3;
25.4.3)将步骤4.2)所得点集o3中的每个点逐个与步骤4.1)中点集o2的每个点做点距计算,以所有点距的平均值作为整体工具识别的误差;
26.4.4)将本次识别到的工具信息和误差输出,其中,工具信息包括工具名、工具坐标系原点坐标和所有标记点的三维坐标。
27.本发明与现有技术相比,具有如下优点与有益效果:
28.1、本发明首次提出光学定位仪在识别工具过程,不仅能做到当工具的标记点都存在且未被遮挡情况下的工具识别,且能做到在过程中若出现工具上少量标记点丢失或遮挡的情况仍能完成对该工具的识别。
29.2、本发明通过兼容少量标记点丢失或遮挡情况的工具识别功能,从而实现在手术导航过程中因误操作导致的标记点掉落丢失或人为遮挡标记点时仍能保证手术的正常进行,在一定程度上保障了手术的顺利实施。
30.3、本发明在光学导航或定位领域具有广泛的应用场景,该方法的算法实现部分逻辑简单易于理解,且基于该方法可进行不同功能的改进,具有广阔的前景。
附图说明
31.图1为本发明方法逻辑流程示意图。
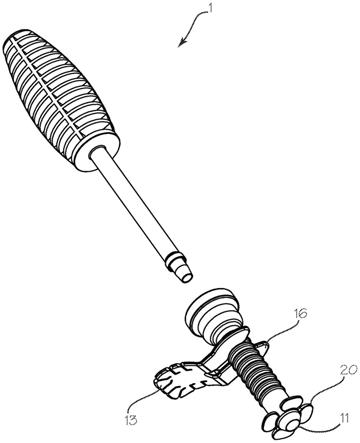
32.图2为使用光学定位仪进行工具识别时的装置示意图。
33.图3为工具出厂时配置的标准工具文件信息图。
34.图4为本发明方法识别完成后输出的工具信息图。
具体实施方式
35.下面结合具体实施例对本发明作进一步说明。
36.参见图1至图4所示,本实施例所提供的基于光学定位仪的兼容少量标记点丢失的工具识别方法,主要是利用光学定位仪对某已知名称工具进行识别,从而完成手术导航过程中自动识别并获取该工具的信息,且实时完成对当前识别的误差分析,其包括以下步骤:
37.s1、使用光学定位仪获取待识别工具的基础信息,包括:标准工具文件信息和可被定位仪识别到的标记点三维坐标;所述标准文件信息包含工具名称、工具上反光标记球的个数和标记点在工具坐标系下三维坐标点集。
38.当全部标记点可被正常识别时,所获取的标准工具文件中标记点的坐标和定位仪识别到的当前工具上标记点的坐标如表1所示:
39.表1标记点坐标
[0040][0041]
当少量标记点缺失或遮挡时,所获取的标准工具文件中标记点的坐标和定位仪识别到的当前工具上标记点的坐标如表2所示:
[0042]
表2标记点坐标
[0043][0044]
s2、利用步骤s1中的数据对工具识别先做的特殊判定包含以下三种,不符合的将不再继续当前识别并直接提示无法识别当前工具:
[0045]
a、待识别工具的标准工具文件要具备:工具出厂时已被制作,但需放入工具识别工程下。
[0046]
b、待识别工具的标记点个数和光学定位仪识别到的标记点个数均不能少于3个:三维物体在空间中位置的确定基于至少三个非共线点的特点,即至少要有3个标记球才能完成识别,否则将无法进行平面的拟合。
[0047]
c、待识别工具的标记点个数和光学定位仪识别到的标记点个数均不能大于200个:大于200个将超过光学定位仪的双目相机能识别到的最大点数。
[0048]
s3、对标准工具文件中的标记点点集和光学定位仪识别到的标记点点集做点对匹配,当匹配完成后的点对个数不小于当前定位仪能够识别到的标记点个数时表示识别成功,包括以下步骤:
[0049]
s301、计算工具文件上的标记点sj(j是工具文件中标记点的初始序号)到点集s={sj|j=1,...,m}中其它标记点的距离记为一维矩阵将点集s的所有记为m维距离矩阵mats。同理计算定位仪识别到的标记点oi(i是光学定位仪识别到的标记点的初始序号)到点集o中其它标记点的距离点集o={oi|i=1,2,3,...,8}的所有记为n维距离矩阵mato。
[0050]
s302、遍历步骤s301计算出的工具文件的距离矩阵mats,以遍历得到的点sj的距离为基准用于与定位仪采集点的距离mato进行匹配计数。
[0051]
s3021、第一次配对:遍历定位仪的距离矩阵mato,得到每个点oi的距离将当前点oi的距离和步骤s302中的点sj的做比较,当的每个距离都和的距离匹配上时,则记作在点集o中查找到oi能匹配上的sj。此时用数组numj保存下当前点sj的索引indexj和数组numi记录当前oi的索引indexi,用数组numj′
和numi′
保存在点集s和o中未配对成功的点索引,同时保存下和当前点oi做距离计算的点集o中的其它点ok(k为点的序
号)记为点集o
′
={ok|k≠i,i=1,2,3,...,8,k=1,2,3,...,8},同理,保存和当前点sj做距离计算的点集s中的其它点s
p
(p为点的序号)。其中,对能匹配上的距离定义为点距差的绝对值小于0.15mm。
[0052]
s3022、对步骤s3021所得点集o
′
和s
′
做同理该步骤的操作,不断减少点集里的点数量进行匹配,当o
′
中的点为空时则结束循环。
[0053]
s303、第二次点集配对:对步骤s302所得索引数组numj和numi做同理于步骤s302的逻辑处理,即对已经配对的点再做一次确认是否有点对未匹配上。如果有未匹配上的,则将该点的索引从对应索引数组中删除且记录该点索引并添加入未配对数组numj′
或numj′
中。
[0054]
s304、第三次点集配对:对未配对成功点也采用同理于步骤s302的逻辑对前两次未匹配成功的点再次匹配。当最终匹配完成后的点对个数不小于当前定位仪可识别到的标记点个数时表示识别成功。
[0055]
s4、对匹配的结果做工具识别精度计算,并输出本次识别完成的工具信息,包含以下步骤:
[0056]
s401、将点集o和s经s3完成配对后分别获得的两个点集o2和s2作为点迭代算法icp的输入。经过icp算法的核心计算,即基于最小二乘法的最优匹配法计算的结果,即为两个点集的刚性匹配变换矩阵(r,t)作为输出。其中r为旋转变换矩阵,t为平移变化矩阵。
[0057]
s402、利用步骤s401计算得到的矩阵(r,t),对完成配对后的点集o2中的每个点做旋转和平移变化得到变化后的点集o3。
[0058]
s403、将步骤s402所得点集o3中的每个点逐个与步骤s401中点集o2的每个点做点距计算,以所有点距的平均值作为整体工具识别的误差。
[0059]
s404、将本次识别到的工具信息和识别误差输出,其中,工具信息包括工具名、工具坐标系原点坐标和所有标记点的三维坐标。
[0060]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。