技术特征:
1.一种用于针对具有一个或多个动态对象(2、3、4)的环境来确定用于移动智能体(1)的适当控制策略的计算机实现方法,包括以下步骤:
‑ꢀ
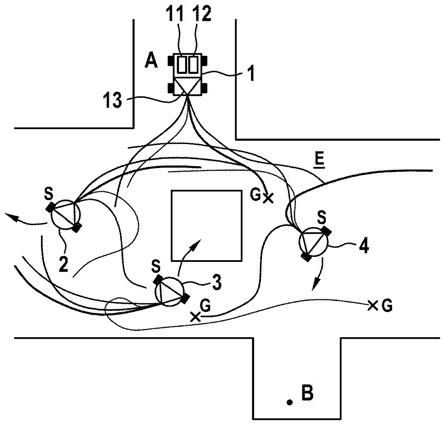
提供(s1)多个不同场景,其中多个动态对象(2、3、4)与每一个场景相关联,其中针对每一个场景,动态对象(2、3、4)中的每一个与开始(s)、目标(g)和行为规范相关联;
‑ꢀ
提供用于移动智能体(1)的多个控制策略候选项;
‑ꢀ
在任一个场景中对每一个控制策略候选项进行基准测试(s3);
‑ꢀ
取决于控制策略候选项的基准测试结果来选择(s4)用于移动智能体(1)的控制策略。2.根据权利要求1所述的方法,其中每个控制策略候选项应用成本函数,或者是基于规则的,以优化具有动态对象(2、3、4)的环境中的移动智能体的运动轨迹。3.根据权利要求1或2所述的方法,其中取决于优化问题的结果来执行在每个场景中对每一个候选项的基准测试,以反映移动智能体(1)在基准测试过程中应用相应的控制策略候选项期间可能面对的每个动态对象(2、3、4)的行为。4.根据权利要求3所述的方法,其中所述优化重复执行,和/或与正在进行的基准测试同时执行。5.根据权利要求1至3中任一项所述的方法,其中所述控制策略候选项包括现有技术方法,诸如:动态窗口方法、弹性带方法和定时弹性带方法。6.根据权利要求1或2所述的方法,其中基准测试的结果是每一个控制策略候选项的基准测试指示符。7.根据权利要求3或4所述的方法,其中基准测试的结果是借助于一个或多个关键性能指示符的函数来获得的,所述一个或多个关键性能指示符特别是针对每一个场景的优化成本值、特别是针对每个个体控制策略候选项的场景的所有成本值的平均值。8.一种用于针对具有一个或多个动态对象(2、3、4)的环境来确定用于移动智能体的适当控制策略的设备,其中所述设备被配置成执行以下步骤:
‑ꢀ
提供多个不同的场景,其中多个动态对象(2、3、4)与每一个场景相关联,其中针对每一个场景,动态对象(2、3、4)中的每一个与开始(s)、目标(g)和行为规范相关联;
‑ꢀ
提供用于移动智能体(1)的多个控制策略候选项;
‑ꢀ
在任一个场景中对每一个控制策略候选项进行基准测试;
‑ꢀ
取决于控制策略候选项的基准测试结果来选择用于移动智能体(1)的控制策略。9.一种包括计算机可读介质的计算机程序产品,所述计算机可读介质在其上具有计算机程序代码部件,当所述程序被加载时,所述计算机程序代码部件使计算机执行过程,从而执行根据权利要求1至8中任一项所述的方法的所有步骤。10.一种其上记录有程序的机器可读介质,其中所述程序用于使计算机执行根据权利要求1至8中任一项的方法。
技术总结
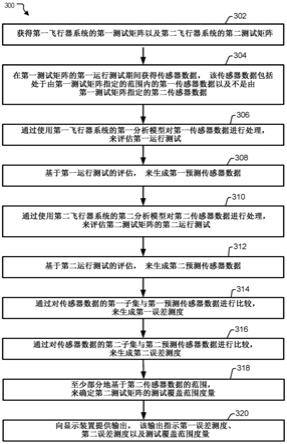
提供了在动态对象环境中确定移动智能体控制策略的方法和设备。本发明涉及一种用于针对具有一个或多个动态对象(2、3、4)的环境来确定用于移动智能体(1)的适当控制策略的计算机实现方法,包括以下步骤:-提供(S1)多个不同场景,其中多个动态对象(2、3、4)与每一个场景相关联,其中针对每一个场景,动态对象(2、3、4)中的每一个与开始、目标和行为规范相关联;-提供用于移动智能体(1)的多个控制策略候选项;-在任一个场景中对每一个控制策略候选项进行基准测试(S3);-取决于控制策略候选项的基准测试结果来选择(S4)用于移动智能体(1)的控制策略。略。略。
技术研发人员:N
受保护的技术使用者:罗伯特
技术研发日:2021.08.11
技术公布日:2022/2/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。