1.本发明涉及用于运行燃料电池系统的设备和计算机实现的方法。
背景技术:
2.燃料电池系统是一种包括大量子系统的整体系统。燃料电池系统包括一个或多个燃料电池堆和为了供应所述一个或多个燃料电池堆而必须存在的多个子系统。
3.燃料电池堆通常一个执行器都没有,即燃料电池堆本身单独就是无源部件或无源组件。
4.虽然可以用物理模型良好地描述该整体系统的各个子系统,但难以对不同子系统和燃料电池堆之间的动态相互作用进行建模。例如,燃料电池堆包含诸如热质量、水或湿气的惯性,所述惯性可以改变该整体系统的动态性,并且可能导致取决于方向的影响,如正载荷跳跃和负载荷跳跃之间的差异。
技术实现要素:
5.根据独立权利要求的计算机实现的方法和设备使得能够随机选择操控变量,其中利用所述燃料电池系统的第一模型来针对所述操控变量确定所述第一模型的输出,其中针对大量时间点分别确定所述操控变量和所述输出的组合,其中根据针对大量时间点确定的组合来定义成本函数,其中第二模型,特别是高斯过程模型根据所述成本函数来学习,以及其中利用通过这种方式学习的第二模型确定用于运行所述燃料电池系统的调节策略。现有模型用作正向模型,所述正向模型确定用于确定所述成本模型的数据点。从调节策略、由所述调节策略确定的操控变量和记录的输出变量的组合中教导出逆模型,所述逆模型特别好地适用于所述调节策略。由此不需要所述正向模型的显式反转。
6.优选地根据特别是随机初始化的变量来确定所述第一模型。由此在正向模型和逆模型中都考虑了所述燃料电池系统中不可调节的变量。
7.优选地,为所述燃料电池系统确定所述燃料电池系统中不可调节的变量的瞬时状态,其中随机选择所述第一模型的输出,其中从所述第二模型、特别是高斯过程模型中提取函数,其中确定在所述瞬时状态下最小化所述函数的操控变量。这是一种特别好地适合的调节策略。
8.可以规定,利用所述调节策略来确定操控变量,其中确定不可调节变量和针对所述操控变量所述第一模型的输出,并且其中检测包括所述操控变量、所述不可调节变量和所述输出的数据点,其中所述第二模型根据所述数据点来学习。由此所述第二模型迭代地学习。
9.在一个方面中,所述第二模型在大量时间点中学习。许多迭代使得可以通过大量数据点来减少不确定性。
10.可以规定,在调节策略中使用从所述第二模型提取的函数来检测其他新数据点。
11.优选地,检测分别包括变量、输出和操控变量的组合的数据点,其中简化的第二模
型利用这些组合来学习,该简化的第二模型根据所述变量和所述输出来预测所述操控变量。这能够实现简化的模型的学习。
12.所述简化的第二模型优选地使用动态主动学习来学习。这是一种用于简化模型学习的特别有效的方法。
13.一种用于运行燃料电池堆的设备规定,所述设备被构造为执行所述方法。所述设备包括用于计算所述方法中的步骤的至少一个计算装置和用于模型的至少一个存储器,并且可以包括一个或多个检测所测量的变量的传感器。
附图说明
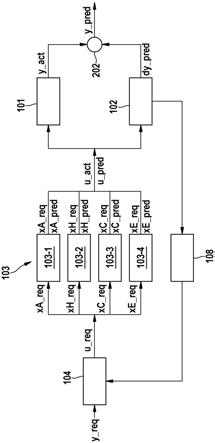
14.其他有利的实施方式从以下描述和附图中得出。在附图中:图1示出了用于运行燃料电池系统的设备的示意图,图2示出了用于运行燃料电池系统的模型的相互作用的示意图,图3示出了用于运行燃料电池系统的方法中的步骤。
具体实施方式
15.图1中示意性地示出了用于运行具有燃料电池堆的燃料电池系统的设备100。设备100被构造为执行以下描述的方法。设备100包括正向模型v,该正向模型被构造为确定作为调节变量的函数的电功率和电压。例如,正向模型v包括第一模型101、第二模型102和至少一个第三模型103。所述燃料电池系统包括燃料电池堆和供应系统。所述燃料电池系统形成整体系统,在该示例中,该整体系统至少部分地用至少一个第三模型103建模。在该示例中,至少一个第三模型103同样是特别通过微分方程描述的化学或物理模型。
16.在该示例中示出了以下四个第三模型103:用于整体系统的一部分的模型103-1,该部分用于输入和/或排出空气。
17.用于整体系统的一部分的模型103-2,该部分用于从储罐系统中添加氢气,从阳极路径中排出吹扫气体,排放阳极路径的水气并在所述燃料电池系统中循环氢气。
18.用于整体系统的一部分的模型103-3,该部分用于冷却所述燃料电池系统。
19.用于整体系统的电气部分的模型103-4,该电气部分将所述燃料电池堆的电功率传输到车载电网或另外的电气网络,例如借助于dc/dc转换器和其他组件,例如用于所述燃料电池堆和/或电池包和/或所述燃料电池堆的个体电池的短路、电流测量、电压测量的设备。
20.第一模型101被构造为例如借助于微分方程描述所述燃料电池堆中的物理关系的物理模型。
21.第二模型102被构造为基于数据的模型,其对所述燃料电池系统的物理模型和实际行为之间的差模型进行建模。
22.到目前为止,还没有精确的动态模型来描述整个燃料电池系统的行为。尽管可以用至少一个第三模型103良好地描述整体系统的各个部分,但是在整体系统中各个部分之间的动态相互作用不或很少为人所知。
23.正向模型v使得可以在时间点t根据在时间点t以及在前面短暂的时间段t内的可能操控变量来预测例如所述燃料电池系统在下一个时间点t 1的电功率。
24.该建模基于具有化学和/或物理成分以及基于数据的成分的混合模型。化学和物理成分由所述整体系统的已知部分组成,为这些已知部分以微分方程的形式定义了第一模型101和至少一个第三模型103。描述了整体系统各个部分——例如通风系统、冷却系统、氢气系统和电气系统——的动态行为的所使用的微分方程的示例例如由以下文献已知:[1] control analysis of an ejector based fuel cell anode recirculation system(基于喷射器的燃料电池阳极再循环系统的控制分析),amey y. karnik、jing sun和julia h. buckland;[2] model-based control of cathode pressure and oxygen excess ratio of a pem fuel cell system(基于模型的pem燃料电池系统阴极压力和氧气过量率控制),michael a. danzer、j
ö
rg wilhelm、harald aschemann、eberhard p.hofer;[3] humidity and pressure regulation in a pem fuel cell using a gain-scheduled static feedback controller(使用增益调度静态反馈控制器的pem燃料电池中的湿度和压力调节),amey y. karnik、jing sun、ieee成员、anna g. stefanopoulou和julia h. buckland;[4] modeling and control of an ejector based anode recirculation system for fuel cells(基于喷射器的燃料电池阳极再循环系统的建模和控制),amey y. karnik,jing sun;[5] flachheitsbasierter entwurf von mehrgr
öß
enregelungen am beispiel eines brennstoffzellensystems(以燃料电池系统为例基于平面度的多变量调节设计),daniel zirkel;[6] modellpr
ä
diktive regelung eines pem-brennstoffzellensystems (pem燃料电池系统的模型预测调节),jens niemeyer;[7] regelung zum effizienten betrieb eines pem-brennstoffzellensystems (有效运行pem燃料电池系统的调节),christian h
ä
hnel。
[0025]
整体系统的所有这些部分都拥有影响其动态性的各个调节变量。在下文中,针对整体系统的示例性部分讲述燃料电池系统的调节变量及其描述,通过这些调节变量可以影响动态性或通过这些调节变量影响动态性。此外,这些变量对于(特别是燃料电池堆的)各个组件的退化或老化也是重要的,并且对于为燃料电池堆供电的系统的能量消耗或功率需求(特别是由于寄生损耗)也是重要的。例如,仅燃料电池系统的空气压缩机就可以消耗燃料电池堆功率的15%。燃料电池堆必须从总额方面更多地承担该功率,以便它可以输出期望的净功率作为有用功率。
[0026]
1)通风系统lambda_cath:与燃料电池系统阴极路径中的化学计量相比过量的空气;mair_cath:燃料电池系统阴极路径中的空气质量流;p_cath:燃料电池系统阴极路径中的压力;t_cath:燃料电池系统阴极路径中的温度;fi_cath:燃料电池系统阴极路径中的湿度。
[0027]
燃料电池系统的这部分用于为燃料电池堆输入和/或排出空气。
[0028]
在示例中,变量lambda_cath和mair_cath可以相互替代地使用。如果燃料电池系
统可以调节输入空气的湿度,则可以使用湿度。
[0029]
2)氢气系统lambda_anod:与燃料电池系统阳极路径中的化学计量相比过量的氢分子,即h2过量mh2_anod:燃料电池系统阳极路径中的氢分子质量流,即h2质量流p_anod:燃料电池系统阳极路径中的压力dp_anod_cath:燃料电池系统中阴极路径和阳极路径之间的压力差mn2_anod:阳极中的氮质量流、氮浓度或氮分子流mh2_addfromtank:从燃料电池系统的h2罐或从外部添加到阳极路径中的h2质量或h2质量流purge_actuation:从阳极路径排出或去除阳极气体的操控drain_actuation:从阳极路径排出或去除液态水的操控purge&drain_actuation:组合地操控用于purge_actuation和drain_actuation的阀门或公共阀门。
[0030]
燃料电池系统的这部分用于氢的循环和燃料电池系统的其他功能。
[0031]
在该示例中,变量lambda_anod和mh2_anod可以相互替代地使用。例如,如果在燃料电池系统中存在氢再循环风扇,则该氢再循环风扇的再循环率与mh2_anod有关。
[0032]
变量mh2_addfromtank可以附加地包括温度说明。可以对lambda_anod或mh2_anod补充地或与其组合地使用变量mh2_addfromtank。
[0033]
变量mn2_anod可以从模型计算中导出或由传感器确定。变量mn2_anod可以用于触发吹扫操作。
[0034]
变量purge_actuation可以在时间上离散地、有间隔地说明用于排出或去除阳极气体的阀门的打开持续时间和/或打开间隔。两者都可以是可变的。
[0035]
变量drain_actuation可以在时间上离散地、有间隔地说明用于排出或去除液态水的阀门的打开持续时间和/或打开间隔。两者都可以是可变的。
[0036]
3)冷却系统t_stack_op:燃料电池系统冷却剂的运行温度,即近似于燃料电池堆的运行温度fan_actuation:风扇的操控dt_stack:冷却剂的温度变化,例如通过燃料电池堆(或燃料电池系统)加热m_cool:通过燃料电池堆(或燃料电池系统)的冷却路径的冷却剂质量流dp_cool:燃料电池堆(或燃料电池系统)冷却路径上的压降pump_actuation:用于产生冷却剂质量流的泵操控valve_actuation:用于产生冷却剂质量流的阀门操控p_cool:堆的冷却剂路径中的压力。
[0037]
燃料电池系统的这部分用于在燃料电池系统中循环冷却剂。
[0038]
变量t_stack_op可以扩展地用于或者更准确地说也可以用于表示燃料电池堆的温度关键组件的膜。为此,例如可以借助于冷却剂温度、堆废气温度、堆电压和堆电流的模型推断出膜温度。
[0039]
可以根据载荷、环境温度、风扇的操控(即根据fan_actuation)对运行温度建模。
[0040]
变量dt_stack可以根据冷却剂的输出温度和输入温度之间的温差来加以确定,并借助于冷却剂的质量流来加以调节,例如使用泵和用于燃料电池堆(或燃料电池系统)的冷却系统的三通阀。
[0041]
作为变量p_cool的替代,可以使用与阴极和/或与阳极的压差。
[0042]
4)电气系统电压:电流:电流密度:电功率:短路继电器、短路设备和可能的其他电气执行器燃料电池堆的电气变量——电压、电流、电流密度和电功率与电流网强烈相互作用,所述电流网的架构可能非常不同。
[0043]
例如,燃料电池堆的电功率可以根据电压和/或电流借助于诸如dc/dc转换器的直流转换器从燃料电池堆传输到电流网。例如,dc/dc转换器可以通过电压降来调节从燃料电池堆提取的电流。
[0044]
可以设置短路继电器,其使燃料电池堆(即两个端子)短路。这例如可以用于冻结启动,在冻结启动的情况下暂时没有电功率传输到电流网,而是将电功率转换为热量。
[0045]
也可以对诸如电阻或效率的从中导出的变量进行建模。
[0046]
这些变量是可变量。并未包括性地讲述所有可能的可变量。在这些可变量中可能分别存在基于模型的值和测量值。作为绝对变量的附加或替代,也可以使用差分变量或与参考值的差。也可以仅使用可能的可变量的子集作为用于建模的参数。
[0047]
设备100包括操控装置104,该操控装置104被构造为操控燃料电池系统或子系统以利用各个调节变量来运行燃料电池堆。设备100可以包括测量装置106,特别是用于检测燃料电池系统上的变量的传感器。在该示例中,该设备包括至少一个计算装置108和至少一个用于模型的存储器110,该计算装置被构造为执行以下描述的方法中的步骤。至少一个计算装置108可以是车辆中的本地计算装置、服务器上或云中的计算装置、或者特别是分布在多个服务器上或分布在车辆以及至少一个服务器上的计算装置。
[0048]
基于图2描述了用于运行燃料电池系统的模型的相互作用。
[0049]
在该示例中,对于燃料电池系统,要提供的运行变量y_req被定义为输入变量。优选地,该运行变量是燃料电池系统的电功率、电压、效率或废热,特别是热功率。应当利用至少一个操控变量u_req来操控燃料电池系统,使得燃料电池实际提供该运行变量。该至少一个操控变量u_req是用于由操控装置104操控燃料电池系统的额定值。在该示例中,待提供的运行变量y_req通过用于所述操控的策略而被映射为至少一个操控变量u_req。该策略可以是通过预给定的线性或非线性函数或通过预给定的表格将待提供的运行变量y_req映射为至少一个操控变量u_req。
[0050]
由于死区时间、惯性、滞后、老化效应或执行器与额定值的偏差,可能会出现偏离所述额定值的操控变量。一方面,该操控变量可以作为实际设置的操控变量u_act例如由传感器检测。另一方面,可以利用至少一个第三模型103作为预测来确定所设置的至少一个操控变量u_pred。在该示例中,针对燃料电池系统的至少一部分,特别是针对燃料电池堆或针
对用于为燃料电池堆供应的子系统中的至少一个,根据为燃料电池系统的至少一部分预给定的操控变量x[subsy]_req确定为燃料电池系统的所述至少一部分设置的至少一个操控变量u_pred的预测x[subsy]_pred,并且根据预测[subsy]_pred定义所设置的至少一个操控变量u_pred。在该示例中,将变量x[subsy]_req组合在定义操控变量u_req的向量中。上面讲述的每个调节变量都可以用作燃料电池系统的相应部分的变量x[subsy]_req。如果为一个部分设置了多个调节变量,则变量x[subsy]_req是包括这些调节变量的向量。下面示例性地仅描述所选择的变量。
[0051]
在图2中,模型103-1(即通风系统)的变量用[subsy]=a表示,模型103-2(即氢气系统)的变量用[subsy]=h表示,模型103-3(即冷却系统)的变量用[subsy]=c表示,并且模型103-4(即电气系统)的变量用[subsy]=e表示。
[0052]
可以利用模型根据分别预给定的操控变量来确定或测量实际操控变量的全部或仅部分。
[0053]
不管所设置的操控变量是测量的(即u_act)还是建模的(即u_pred),该操控变量都可以是燃料电池堆的阳极和阴极之间的压差,冷却剂在其进入时的第一温度与该冷却剂在其离开燃料电池堆时的第二温度之间的温度差,空气的湿度,特别是当空气离开燃料电池堆时的湿度,空气、氢气和/或冷却剂的压力,运行温度,空气质量流,氢分子质量流,冷却介质质量流或电特征参数,特别是燃料电池堆或系统上的电流、电流密度或电压。燃料电池系统是整体系统。
[0054]
操控变量定义例如燃料电池堆的阳极和阴极之间的压差、冷却剂在其进入时的第一温度与该冷却剂在其离开燃料电池堆时的第二温度之间的温差,空气的湿度,特别是当空气离开燃料电池堆时的湿度,空气、氢气和/或冷却剂的压力,运行温度,燃料电池系统的用于输入和/或排出空气的部分中的空气质量流。所设置的操控变量可以定义燃料电池系统的用于在燃料电池系统中循环氢的部分中的氢分子质量流。操控变量可以定义燃料电池系统的用于冷却燃料电池堆或燃料电池系统的部分的冷却介质质量流。所设置的操控变量可以定义近似为冷却剂温度的运行温度。所设置的操控变量可以定义燃料电池系统的电气部分的电特征参数,例如燃料电池之一或燃料电池系统的电流、电流密度或电压。
[0055]
优选地,至少一个预给定的操控变量u_req定义了压力、运行温度、空气质量流、氢分子质量流、冷却介质质量流或电特征参数的额定值,所述电特征参数特别是燃料电池系统的电流或电压。在该示例中,操控变量xa_req定义了在时间点t在整体系统的用于输入和/或排出空气的部分中的压力或空气质量流的额定值。在该示例中,操控变量xh_req定义了在时间点t在整体系统的用于燃料电池系统中氢循环的部分中氢分子质量流的额定值。在该示例中,操控变量xc_req定义了在时间点t在整体系统的用于冷却燃料电池系统的部分的冷却介质质量流的额定值。操控变量也可以定义近似为冷却剂温度的运行温度。在该示例中,操控变量xe_req定义了在时间点t整体系统的电气部分的电特征参数的额定值,例如燃料电池或燃料电池系统的电流或电压。在该示例中,预给定的操控变量u_req是向量u_req=(xa_req,xh_req,xc_req,xe_req)
t
。与此相应地,所出现的操控变量在该示例中由向量定义。在所有所出现的操控变量都可测量的情况下,得到的操控变量是u_act=(xa_act,xh_act,xc_act,xe_act)
t
。在所有所出现的操控变量都被建模的情况下,得到的操控变量是u_pred=(xa_pred,xh_pred,xc_pred,xe_pred)
t
。优选地使用混合形式,在所述混合形式
中测量可以用无论如何都在燃料电池系统上可用的传感器测量的得到的操控变量并且对其他的操控变量建模。
[0056]
通过第一模型101根据至少一个得到的操控变量来确定燃料电池系统的运行变量y_act。在该示例中,得到的运行变量是一个标量,但是也可以通过第一个模型101来确定具有不同运行变量的多个值的向量。在该示例中,针对作为静态模型的第一模型101,使用根据kulikovsky的燃料电池模型。根据kulikovsky的模型从用于描述阴极催化剂层的电动力学的基础微分方程系统中以解析方式导出。该模型使用以下输入变量:阴极质量流、阴极λ、阴极输入压力、阴极输出压力、阴极入口处的空气湿度、阴极出口处的空气湿度、电流或电流密度、冷却剂进入温度和冷却剂离开温度。
[0057]
通过第二模型102根据至少一个得到的操控变量确定由第一模型101确定的运行变量y_act与燃料电池系统上运行变量的实际值的偏差dy_pred的预测。
[0058]
在该示例中,第二模型102是基于数据的模型,该模型应当通过高斯过程预测第一模型101与燃料电池系统的实际测量行为之间的偏差dy_pred。在训练期间,第二模型102首先可以被随机初始化并且如下所述在迭代中加以训练。
[0059]
在该示例中第二模型102已经得到了训练。
[0060]
根据由第一模型101确定的运行变量y_act并且根据对偏差dy_pred的预测,在校正装置202上确定运行变量y_pred。这意味着通过利用基于数据的模型对偏差的预测来校正通过物理模型对运行变量的预测。
[0061]
计算装置108确定正向模型v的逆模型,该逆模型将时间步长t中期望的功率映射为调节变量,例如压力、空气质量流、氢分子质量流、冷却剂质量流或温度,所述调节变量在调节策略的下一个时间步长t 1中应用。下面对此进行描述。
[0062]
计算装置108被构造为确定调节策略,所述调节策略预给定调节变量的额定值,使得该示例中的燃料电池系统提供期望的电功率。如上所述,还可以有其他目标,例如热量。
[0063]
下面参考图3描述的用于运行燃料电池系统的计算机实现的方法在步骤301中规定,在时间点t选择随机操控变量u_t。例如,选择空气压力或空气质量流作为操控变量u_t。对于第一时间点t=1可以规定,初始化不能被随机调节的变量x_t。
[0064]
在步骤302中,利用正向模型v确定正向模型v的随机输出y_t。例如,使用正向模型,通过选择操控变量u_t,将电功率或电压模拟为时间点t时的输出y_t:y_t=v(u_t,x_t)。在该示例中,针对大量时间点分别记录操控变量(u_t)和输出(y_t)的组合。
[0065]
在步骤303中,对于所记录的组合,用成本函数评估燃料电池系统在所记录的组合f(u_t,x_t,y_t)中的相应时间点运行得如何。
[0066]
在步骤304中,第二模型,特别是高斯过程模型根据所述成本函数来学习。该模型将调节质量预测为输入变量x_t、操控变量u_t和输出y_t的函数。该模型还确定了对质量不确定性的估计。由此针对状态f(u_t,x_t,y_t)产生调节变量u_t、不可调节的可变量x_t和瞬时输出y_t的随机映射。可以用y_t说明电功率或电压。
[0067]
在步骤305中,用经过学习的质量模型确定调节策略。
[0068]
在该示例中,在步骤305-1中确定燃料电池系统的不可调节的变量x_t的瞬时状态。在步骤305-2中,选择随机输出y_t。在步骤305-3中,从质量模型中提取函数。在该示例中,该函数是从经过学习的高斯过程模型中提取的。该函数用于估计状态的质量。在步骤
305-4中,确定针对瞬时状态最小化所述函数的最优操控变量u*_t:u*_t=argmin_{u_t}f(x_t,u_t,y_t)可选地,该方法继续进行步骤303,以根据调节策略利用正向模型v检测新数据点。
[0069]
可选地,可以在大量时间点重复该方法的步骤。由此逐渐减小了关于状态f(u_t,x_t,y_t)的初始大的不确定性。
[0070]
在该示例中规定,在调节策略中使用从质量模型中提取的函数来检测其他新数据点。
[0071]
这些数据点是变量x_t、输出y_t和操控变量u_t的组合。可以规定,第二模型从这些组合出发学习,该第二模型根据变量x_t和输出y_t预测操控变量u_t。由此减少了计算耗费和计算复杂度。
[0072]
还可以规定,将动态主动学习用于第二模型的学习。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。