技术特征:
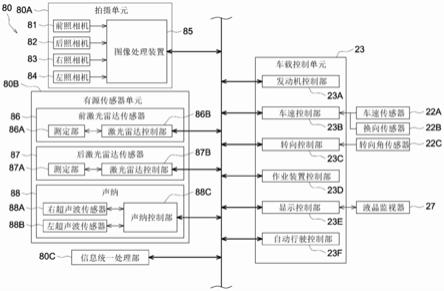
1.一种作业车辆用的自动行驶系统,其特征在于,所述自动行驶系统具有自动行驶控制部,该自动行驶控制部使具备检测障碍物的障碍物检测单元的作业车辆自动行驶,所述障碍物检测单元包括自所述作业车辆拍摄规定方向的设定范围的拍摄部、和自所述作业车辆将与所述拍摄部相同的规定方向的设定范围作为测定对象的有源传感器,在所述障碍物检测单元从所述拍摄部的信息中检测出所述障碍物、且从所述有源传感器的信息中获取到与该障碍物的分隔距离的情况下,所述自动行驶控制部基于从所述有源传感器的信息中获取到的与所述障碍物的分隔距离,来执行避免所述作业车辆与所述障碍物的碰撞的第一避免碰撞控制。2.根据权利要求1所述的作业车辆用的自动行驶系统,其特征在于,在所述障碍物检测单元从所述拍摄部的信息中检测出所述障碍物,而相对地,所述障碍物检测单元无法从所述有源传感器的信息中获取到与该障碍物的分隔距离的情况下,所述自动行驶控制部基于从所述拍摄部的信息中获取到的与所述障碍物的分隔距离,来执行避免碰撞率比所述第一避免碰撞控制高的第二避免碰撞控制。3.根据权利要求1或2所述的作业车辆用的自动行驶系统,其特征在于,在所述障碍物检测单元从所述拍摄部的信息中检测出所述障碍物,而相对地,所述障碍物检测单元无法从所述有源传感器的信息中获取到与所述障碍物的分隔距离,而是能够获取到与所述障碍物周边的分隔距离的情况下,所述自动行驶控制部基于所述有源传感器获取到的与所述障碍物周边的分隔距离,来执行所述第一避免碰撞控制。4.根据权利要求1~3中的任一项所述的作业车辆用的自动行驶系统,其特征在于,在测定阻碍物相对于所述有源传感器的附着率满足规定条件的情况下,所述自动行驶控制部将使所述作业车辆的车速降低至超低速状态的超低速行驶状态持续规定时间,在直至经过规定时间为止的期间所述附着率不再满足所述规定条件的情况下,所述自动行驶控制部使所述作业车辆的车速从超低速状态恢复为原来的车速,另一方面,在直至经过规定时间为止的期间所述附着率持续满足所述规定条件的情况下,所述自动行驶控制部使所述作业车辆的自动行驶停止。
技术总结
作业车辆(1)用的自动行驶系统具有自动行驶控制部(23F),该自动行驶控制部(23F)使具备检测障碍物的障碍物检测单元(80)的作业车辆自动行驶,障碍物检测单元(80)包括拍摄部(81~84)和有源传感器(86~88),在障碍物检测单元(80)从拍摄部(81~84)的信息中检测出障碍物、且从有源传感器(86~88)的信息中获取到与该障碍物的分隔距离的情况下,自动行驶控制部(23F)基于从有源传感器(86~88)的信息中获取到的与障碍物的分隔距离,来执行避免作业车辆与障碍物的碰撞的第一避免碰撞控制。与障碍物的碰撞的第一避免碰撞控制。与障碍物的碰撞的第一避免碰撞控制。
技术研发人员:岩濑卓也 杉田士郎 西别府慎也
受保护的技术使用者:洋马动力科技有限公司
技术研发日:2020.07.09
技术公布日:2022/2/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。