用于晶片载体的把手
1.相关申请案的交叉参考
2.本技术案主张2019年5月23日申请的第62/851,983号美国临时申请案的优先权及权利,所述申请案的全文出于所有目的以引用的方式并入本文中。
技术领域
3.本公开大体上涉及一种前开式衬底容器。更具体来说,本公开涉及一种用于前开式衬底容器的把手。
背景技术:
4.半导体装置可由晶片衬底制成。晶片衬底或简称为晶片经历一系列制造步骤。例如,制造步骤可包含但不限于材料层沉积、掺杂、蚀刻,或使衬底的材料发生化学或物理反应。可在制造之前、期间或之后在前开式衬底容器中存储及输送一或多个晶片。在一些制造步骤中,可在晶片仍在前开式衬底容器中时对其进行处理。前开式衬底容器保护所存储的晶片免受物理损坏(例如,撞击)及污染。
技术实现要素:
5.本公开大体上涉及一种用于存储或输送晶片的前开式衬底容器。更具体来说,本公开涉及一种用于前开式衬底容器的把手。
6.公开一种用于晶片载体的把手。所述把手包含主体、具有突片的可插入部件及具有柔性延伸部的锁定机构。所述可插入部件经配置以插入到晶片载体的孔隙中。当在接合状态时,所述可插入部件被保持于所述孔隙中。所述锁定机构可在锁定状态与解锁状态之间移动。当在所述锁定状态时,所述锁定机构将所述突片维持在所述接合状态,且所述柔性延伸部经定位以将所述锁定机构维持在所述锁定状态。
7.在实施例中,所述突片安置于所述可插入部件的第一侧上。所述可插入部件包含与所述第一侧相对的第二侧,且当在所述锁定状态时,所述锁定部件沿着所述第二侧延伸。
8.在实施例中,所述把手包含安置于所述主体的第一端处的突出部。所述突出部包含在不同方向上延伸的第一部分及第二部分。所述突出部经配置以接合所述晶片载体的轨道以帮助将所述把手固定到所述晶片载体。
9.公开一种晶片载体。所述晶片载体包含外表面、把手及锁定机构。所述晶片载体还包含从所述外表面延伸的突出部。孔隙通过所述突出部界定且在所述外表面与所述突出部的范围之间。所述把手附接到所述晶片载体的所述外表面且包含主体。所述主体包含延伸到所述晶片载体的所述孔隙中以将所述把手固定到所述外表面的可插入部件。所述可插入部件包含突片,当在接合状态时,所述突片将所述可插入部件保持在所述孔隙中。所述锁定机构包含柔性部件,且可相对于所述可插入部件在锁定状态与解锁状态之间移动。当在所述锁定状态时,所述锁定机构将所述突片维持在所述接合状态,且柔性延伸部将所述锁定机构维持在所述锁定状态。
10.在实施例中,所述锁定机构在平行于所述可插入部件插入到所述孔隙中的方向的方向上从所述解锁状态移动到所述锁定状态。
11.在实施例中,所述晶片载体包含沿着其外表面延伸的轨道,且所述把手包含安置于所述把手的所述主体的第一端处的突出部。所述突出部经配置以接合所述晶片载体的所述轨道以帮助固定所述把手。在实施例中,使所述突出部移动以在与所述可插入部件插入到所述晶片载体的所述孔隙中的相同方向上接合所述轨道。在实施例中,所述突出部与所述轨道的所述接合抑制所述把手远离或朝向所述晶片载体的第一侧的移动。
12.在实施例中,所述晶片载体是前开式晶片盒(foup)。在实施例中,所述晶片载体是前开式运输盒(fosb)。
附图说明
13.可结合附图考虑各种说明性实施例的以下描述来更全面地理解本公开。
14.图1是根据本公开的实施例的晶片载体的右侧透视图。
15.图2是图1中所展示的不具有前门的晶片载体的左侧透视图。
16.图3是图1中所展示的不具有前门的晶片载体的正视图。
17.图4是图1中所展示的不具有前门的晶片载体的侧视图。
18.图5是图1中所展示的其中把手被拆卸的晶片载体的右侧透视图。
19.图6a是根据实施例的用于晶片载体的可拆卸把手的侧视图。
20.图6b是图6a中所展示的可拆卸把手的正视图。
21.图6c是图6a中所展示的可拆卸把手的后视图。
22.图7是根据实施例的用于晶片载体的可拆卸把手的锁定机构的透视图。
23.图8a是沿着线viii-viii的图3中所展示的晶片载体的剖面图。
24.图8b是图8a中所展示的区域b的放大图。
25.图8c是图8a中所展示的区域c的放大图。
26.图9是沿着线ix-ix的图4中所展示的晶片载体的部分的剖面图。
27.图10是根据本公开的实施例的晶片载体的部分的透视图。
28.图11是图10中所展示的晶片载体的锁定机构的正透视图。
29.图12是图10中所展示的晶片载体的锁定机构的侧透视图。
30.图13是根据本公开的实施例的晶片载体的部分的透视图。
31.图14是图13中所展示的晶片载体的锁定机构的正透视图。
32.图15是图13中所展示的晶片载体的锁定机构的后透视图。
33.图16是沿着线xvi-xvi的图13中所展示的晶片载体的部分的剖面图。
34.图17是根据本公开的实施例的包含把手及锁定机构的晶片的侧视图。
35.图18a是图17中所展示的把手的透视图。
36.图18b是图17中所展示的把手的正视图。
37.图18c是图17中所展示的把手的侧视图。
38.图19是图17中所展示的与把手相互作用的锁定机构的透视图。
39.图20a是图17中所展示的区域d的放大图。
40.图20b是图17中所展示的区域e的放大图。
41.图21是沿着线21a-21a取得的图17中所展示的晶片载体的横截面视图。
42.图22是根据实施例的具有处于拆卸状态的把手的晶片载体的透视图。
43.图23是图22中所展示的晶片载体的侧视图。
44.图24a是图22及23中所展示的把手的透视图。
45.图24b是图22及23中所展示的把手的正视图。
46.图24c是图22及23中所展示的把手的侧视图。
47.图25a是图23中所展示的区域f的放大图。
48.图25b是图23中所展示的区域g的放大图。
49.图26是根据实施例的与设置于图22及23中所展示的晶片载体的侧壁上的轨道接合的锁定机构的部分横截面视图。
50.图27是根据另一实施例的晶片载体的透视图。
51.图28是图27的晶片载体的侧视图。
52.图29是图27及28中所展示的把手的透视图。
53.图30是附接到28中所展示的晶片载体的侧壁的把手的特写图。
54.虽然本公开可有各种修改及替代形式,但其细节已在图中通过实例展示且将进行详细描述。但是,应理解,不意在将本公开的方面限制于所描述的特定说明性实施例。恰相反,意在涵盖落在本公开的精神及范围内的所有修改、等效物及替代物。
具体实施方式
55.如在本说明书及所附权利要求书中所使用,单数形式“一”、“一个”及“所述”包含复数参考物,除非上下文另有明确规定。如在本说明书及所附权利要求书中所使用,术语“或”一般以其包含“及/或”的意义采用,除非上下文另有明确规定。
56.术语“约”一般指代数字范围,其被视为等效于所叙述的值(例如,具有相同功能或结果)。在许多例子中,术语“约”可包含舍入到最接近的有效数的数字。
57.使用端点表达的数值范围包含归入所述范围内的所有数字(例如,1到5包含1、1.5、2、2.75、3、3.80、4及5)。
58.下文详细描述应参考图来阅读,其中不同图中的类似元件被相同地编号。详细描述及图(其不一定按比例)描绘说明性实施例且并不意在限制本发明的范围。所描绘的说明性实施例仅意在为示范性的。任何说明性实施例的选定特征可被并入到额外实施例中,除非另有明确相反陈述。
59.通过制造晶片衬底而形成半导体装置。可在制造期间、之前或之后将一或多个晶片衬底或简称为晶片存储于晶片载体内。前开式衬底容器在存储或输送期间保护晶片载体内的晶片。例如,晶片载体保护晶片免受由撞击其它对象及彼此撞击而导致的损坏。例如,晶片载体可经配置以在晶片载体的前部封闭时最小化或防止被污染空气进入晶片载体。晶片载体具有允许人(例如,技术人员、处理者等)在位置之间对其进行运载的大小及重量。
60.晶片载体可为例如但不限于前开式晶片盒(foup)或前开式运输盒(fosb)。一般来说,foup用于在制造设施内输送衬底晶片,而fosb用于跨较长距离(例如,在制造设施之间,从制造设施到另一设施)输送衬底晶片。例如,foup可经配置以在foup的前部敞开时防止被污染空气进入foup。例如,foup也可经配置以选择性地允许气体进入foup中,例如但不限于
处理用于制造的气体或用于在foup内产生正气压的经过滤气体。
61.所揭示的实施例涉及一种包含把手的晶片载体。把手允许人安全地运载晶片载体。有利地,所揭示的晶片载体包含把手,所述把手除其它特征外还具有锁定机构及轨道,其降低把手意外拆卸的风险且减小晶片载体在被运载时的挠曲/变形量,借此提高晶片载体的内容物的安全性。
62.锁定机构防止将把手从晶片载体意外移除。有利地,可用施加到晶片载体的力安装把手,所述力与例如可能导致对晶片载体的损坏的现有配置相比相对较低。本公开中的把手允许具有相对于一体成型的把手的增强强度的结构,且允许分开清洁把手,此增加晶片载体清洁度。
63.图1到4展示根据实施例的晶片载体。图1到4中所展示的晶片载体是晶片载体1的实施例。图1是晶片载体1的右侧透视图。图2是晶片载体1的左侧透视图。图3是晶片载体1的正视图。图4是晶片载体1的侧视图。根据各种实施例,晶片载体1可为foup。在其它实施例中,晶片载体1可为fosb。
64.晶片载体1包含第一把手100a、第二把手100b(图2)、用于第一把手100a的第一锁定机构150a(图4)及用于第二把手100b的第二锁定机构150b(图2)。
65.每一把手100a、100b优选地经配置为可非破坏性地拆卸的。把手100a、100b具有相同结构且经配置以按相同方式附接或拆卸,只有彼此成镜像除外。第一把手100a及第一锁定机构150a的特征在图中以后缀“a”进行描述及标记,而第二把手100b及第二锁定机构100b的特征在图中以后缀“b”进行描述及标记。除非另有明确描述或展示,否则应理解,把手100b及锁定机构150b分别包含针对把手100a及锁定机构150a描述或展示的每一“a”特征的对应“b”特征。
66.晶片载体1包含前门7,及被统称为侧10、12、14、16、18的顶部10、右侧12(图1及4)、左侧14(图2)、后部16及底部18。前门7及侧10、12、14、16、18形成经围封内部空间6(图3)。晶片载体1在晶片载体1的前部8处具有前开口9(图2)。前门7覆盖前开口7(图1)且可通过移动(例如,敞开、移除)前门7而进入晶片载体1。图2及3说明其中前门7被移除(例如,敞开)的晶片载体1。
67.侧10、12、14、16、18及前门7界定晶片载体1的外表面22。在实施例中,侧10、12、14、16、18是单个整体结构。例如,侧10、12、14、16、18可被模制为单件连续材料或由永久结合在一起的多个件模制而成。在实施例中,晶片载体1由通常不起反应且防泄漏(例如,具有低渗透性)的材料制成,例如但不限于高纯度聚碳酸酯。
68.如图3中所展示,晶片齿20安置于晶片载体1内以用于将多个晶片(未展示)存储于内部空间6中。晶片被插入到晶片齿20的空间中,且在晶片载体1内以相对于页面垂直的方向堆叠。在实施例中,晶片载体1可包含除所展示的晶片齿20以外的已知用于将晶片固持于晶片载体1的内部空间6内的不同结构。前门7覆盖晶片载体1的前开口9以围封内部空间6。晶片被晶片载体1保护在内部空间6内。前门7经配置以与侧10、12、14、18形成密封以防止空气泄漏到晶片载体1的内部空间6中且污染所存储的晶片。
69.顶部10包含自动化接口26且底部18包含底座24。自动化接口26也可被称为顶部处置凸缘。在实施例中,自动化接口26允许将用于移动晶片载体1的标准自动化附件(未展示)(例如但不限于自动化臂)连接到晶片载体1。例如,自动化臂可用于在不同制造设备之间移
动晶片载体1。把手100a、100b经配置为未延伸到通常经保留用于自动化附件的晶片载体1周围的体积中。在实施例中,底座24可用于将晶片载体1连接到不同制造设备。
70.在实施例中,晶片载体1可包含一或多个端口28。例如,端口28可为用于将气体提供到晶片载体1(例如,在端口28流体连接到流体源时敞开)的入口,或用于允许气体流出晶片载体1的出口(例如,吹扫口(purge))。例如,端口28可为用于在前门7敞开时在晶片载体1内产生正压或用于在制造步骤中使一或多个工艺气体循环穿过晶片载体1的入口。例如,底座24在不同制造步骤连接到(例如,安置于、附接到,等等)适当制造设备(未展示),且气体经由端口28注入到晶片载体1中并循环穿过晶片载体1。
71.第一把手100a附接到晶片载体1的一个侧12(图1),且第二把手100b附接到晶片载体1的不同侧14(图2)。把手100a、100b允许人用手在位置之间运载晶片载体1。
72.晶片载体1经配置以防止把手100a、100b的意外拆卸。把手100a、100b中的每一者包含经配置以防止其相应把手100a、100b从晶片载体1意外拆卸的锁定机构150a、150b(图2及4)。例如,把手100a、100b在被运载时从晶片载体1意外拆卸可能导致晶片载体1掉落,且损坏存储于晶片载体1中的晶片。
73.图5是其中把手100a被拆卸的晶片载体1的右侧透视图。当被附接时(图1),把手100a沿着晶片载体1的侧12延伸。
74.如图5中所展示,晶片载体1包含沿着侧12设置的突出部30a、40a及轨道50a、60a。突出部30a、40a各自从晶片载体1的外表面22延伸。把手100a经由突出部30a、40a及轨道50a、60a固定到晶片载体1。如图2中所展示,突出部30b、40b及轨道50b、60b沿着晶片载体1的相对侧14设置以用于将第二把手100b固定到晶片载体1。
75.孔隙32a、42a由突出部30a、40a形成。孔隙32a由突出部30a界定且定位于晶片载体1的外表面22与突出部30a的范围34a之间。孔隙42a由突出部40a界定且定位于晶片载体1的外表面22与突出部40a的范围44a之间。每一孔隙32a、42a沿着晶片载体1的侧12从晶片载体1的前部8延伸到后部16。
76.图6a到6c是根据实施例的把手100a的视图。图6a是把手100a的侧视图。图6b是把手100a的正视图。例如,图4及图6b是把手100a的类似视角。图6c是把手100a的后视图。
77.把手100a包含具有第一端112a及第二端114a的主体110a。握把120a安置于主体110a的第一端112a与第二端114a之间。如图6a中所展示,握把120a具有更靠近主体110a的第一端112a的第一端122a及更靠近主体110a的第二端114a的第二端124a。
78.当把手100a附接到晶片载体1的外表面22时,把手100a经配置以使人抓握把手100a的握把120a以运载晶片载体1。握把120a经配置为在把手100a附接到侧12时容易抓取及处置。例如,如图1及3中所展示,握把120a与侧12隔开且在允许足够空间供人抓握且固持握把120a的方向上延伸。如图6a到6c中所展示,握把120a界定把手100a的主体110a的部分。
79.在实施例中,握把120a可包含彩色指示器126a(图6b)。例如,彩色指示器可用于指示晶片载体1的内容物(例如,晶片载体1中所装纳的晶片的特定类型,晶片载体1中的晶片的当前制造阶段,或类似者)。在实施例中,彩色指示器126a可与把手100a的主体110a成一体,以避免形成难以清洁的表面(例如,裂缝、沟槽等),这是因为把手100a、100b的可拆卸性允许在期望晶片载体1的不同彩色指示器时更换把手100a、100b。例如,此实施例中的彩色指示器126a可通过对主体110a本身着色或通过一体地形成于主体110a中的着色材料来提
供。
80.把手100a还包含第一可插入部件130a及第二可插入部件140a。如图6a中所展示,第一可插入部件130a定位于第一端112a与握把120a之间。在实施例中,第一可插入部件130a可安置于握把120a的端122a处,安置于第一端112a处,或安置于第一端112a与握把120a之间。可插入部件130a包含突片132a、前侧134a及与前侧134a相对的背侧136a。突片132a在可插入部件130a的前侧134a上且延伸远离可插入部件130a的前侧134a。可插入部件130a具有与主体110a相对的端138a(图6b及8c)。在实施例中,突片132a定位于可插入部件130a的与靠近主体110a相比更靠近端138a的前侧134a上。例如,突片132a定位于前侧134a上且沿着端138a延伸。
81.如图6a中所展示,第二可插入部件140a安置于握把120a与第二端114a之间。在实施例中,第二可插入部件140a可安置于握把120a的端124a处,安置于第二端114a处,或安置于第二端114a与握把120a之间。类似于第一可插入部件130a,第二可插入部件140a还包含突片142a、前侧144a及背侧146a。在实施例中,第一可插入部件130a及第二可插入部件140a中的一者或两者可与主体110a成一体(例如,形成为单件连续材料)。例如,把手100a在被模制(例如,注射模制)时至少包含形成为单件的主体110a及可插入部件130a。在此实施例中,可插入部件130a经形成为具有相对于主体110a的所要柔性量,以允许把手100a的附接及拆卸,如下文描述。
82.在实施例中,可插入部件130a、140a沿着不同于握把120a的主体110a的部分定位(即,未沿着握把120a定位)。此可提供用于抓握握把120a的空间,且可有助于防止人在处置握把120a时意外地接触可插入部件130a、140a中的一者。例如,此意外接触最终可损坏或松开可插入部件130a、140a。
83.把手100a还包含第一突出部170a及第二突出部180a。第一突出部170a定位于主体110a的第一端112a处。如图4中所展示,第一突出部170a经配置为在从侧面观看晶片载体1时,与晶片载体1的顶部10的外表面22齐平或在其下方。例如,第一突出部170a经配置为未延伸在晶片载体1的顶部10的外表面22上方。这防止突出部170a在正附接到自动化接口26或在已附接到自动化接口26时干扰标准自动化附接操作的空间。第二突出部180a定位于主体110a的第二端114a处。第一突出部170a经配置以接合晶片载体1的第一轨道50a。第二突出部180a经配置以与晶片载体1的第二轨道60a接合。
84.图1展示附接到晶片载体1的外表面22的把手100a,而图5展示被拆卸时的把手100a。如通过比较图1及5而展示,通过使拆卸的把手100a(如图5中所展示)相对于晶片载体1在第一方向d1上移动而附接把手100a。在实施例中,第一方向d1从foup的后部16延伸到前部8。例如,第一方向d1可大体平行于晶片载体1的侧12。在使把手100a相对于晶片载体1在第一方向d1上移动时,可插入部件130a、140a中的每一者插入到其对应孔隙32a、42a中,且每一突出部170a、180a与轨道50a、60a的对应者接合。经插入的可插入部件130a、140a及经接合的突出部170a、180a将把手100a固定到晶片载体1。经附接把手100a(如图4中所展示)的拆卸包含使把手100a在与第一方向d1相反的方向d2上移动。下文更详细描述经附接把手100a的拆卸。
85.可插入部件130a经配置以相对于主体110a挠曲(即,相对于主体110a弯曲)。更具体来说,可插入部件130a经配置以在垂直于其从主体110a延伸的方向d1的方向上(例如,在
图6b中,在进入或离开页面的方向上)挠曲。在实施例中,此柔性配置允许可插入部件130a朝向及远离晶片载体1的外表面22的(重复)挠曲。在实施例中,当将可插入部件130a插入到孔隙32a中时,突片132a接触突出部30a且可插入部件130a被迫挠曲朝向晶片载体1的外表面22,以使可插入部件130a配合到孔隙32a中。例如,可插入部件130a的挠曲允许将可插入部件130a插入到孔隙32a中。因此,在使可插入部件130a移动到孔隙32a且到孔隙32a中时,突片132a接触突出部30a,所述突出部30a施加压力到可插入部件130a且使可插入部件130a挠曲朝向晶片载体1的外表面22。
86.一旦突片132a行进穿过孔隙32a,突片132a就挠曲为更远离晶片载体1的外表面22。更具体来说,挠曲的可插入部件130a的张力使突片132a挠曲为更远离晶片载体1的外表面22。突片132a的挠曲将突片132a置于接合状态。处于接合状态的突片132a将可插入部件130a保持在孔隙32a中。更具体来说,处于其接合状态的突片134a防止可插入部件130a从孔隙32a移除。当把手100a在与插入方向d1相反的方向d2上移动(例如,拉动)时,突片132a通过接触突出部30a的前外表面36a (图4)来防止可插入部件130a的移除。例如,突片132a被钩在突出部30a的前外表面36a上。如图4中所展示,前外表面36a(例如,在方向d1上)背朝把手100a的主体110a。
87.在实施例中,突片132a还具有未接合状态。在处于未接合状态时,突片132a经配置以允许可插入部件130a从孔隙32a移除。例如,处于未接合状态的突片132a允许可插入部件130a相对于突出部30a在与插入方向相反d1的方向d2上移动。在实施例中,晶片载体1经配置以在把手100a的可插入部件130a、140a的所有突片132a、142a都处于未接合状态时允许把手100a的拆卸。
88.将可插入部件130a插入到孔隙32a中的把手100a的移动(例如,在第一方向d1上的移动)还使第一突出部170a相对于第一轨道50a移动且使第二突出部180a相对于第二轨道60a移动。更具体来说,把手100a的这种移动导致第一突出部170a接合第一轨道50a及第二突出部180a接合第二轨道60a。每一突出部170a、180a与其对应轨道50a、60a的接合经配置以防止把手100a移动远离晶片载体1(例如,图3中的方向d3)。例如,突出部170a、180a与其轨道50a、60a的接合可减轻将把手100a拉动远离晶片载体1的侧12的力,且可通过将拉力分布到晶片载体1的边角而减轻侧12的向外偏转。
89.可插入部件140a及突片142a以类似于可插入部件130a及突片132a的方式插入于晶片载体1的对应突出部40a及孔隙42a中。在实施例中,把手100a可经配置使得把手100a在第一方向d1上的一次移动插入可插入部件130a、140a且接合突出部170a、180a。在实施例中,把手100a可经配置使得把手100a在第一方向d1上的一次移动插入可插入部件130a、140a,使突片132a、142a移动到接合状态,且接合突出部170a、180a。
90.图7是根据实施例的锁定机构150a的透视图。锁定机构150a经配置以防止把手100a从晶片载体1的非预期拆卸。例如,锁定机构150a在处于锁定状态时经配置以确保与可插入部件130a、140a的意外接触或把手100a上的力(例如,完整晶片载体1的重量、晶片载体1的推挤等)无法迫使突片132a脱离其接合状态。
91.锁定机构150a包含前端152a、后端154a、接触表面156a及柔性延伸部160a。锁定机构150a还具有从前端152a延伸到后端154a的长度l。接触表面156a定位于锁定机构150a的前端152a与柔性延伸部160a之间。在实施例中,锁定机构150a在前端152a与柔性延伸部
160a之间的最大厚度t1在接触表面156a处。锁定机构150a的厚度t1垂直于其长度l。
92.如图4中所展示,锁定机构150a被保持在把手100a的主体110a的导引件116a中。锁定机构150a被保持在导引件116a中以可滑动地附接到主体110a。例如,导引件116a允许锁定机构150a沿着第一方向d1移动,同时防止锁定机构150a在垂直于第一方向d1的方向(例如,图3中的方向d3、方向d4等)上移动。在实施例中,锁定机构150a包含上限制件164a及下限制件166a(图7)。锁定机构150a通过导引件116a及两个限制件164a、166a可滑动地附接到把手100a的主体110a。上限制件164a定位于导引件116a上方(例如,在图4中,在离开页面的方向上,在图4中,导引件116a比上限制件164a更靠近外表面22),且下限制件166a定位于导引件116a下方(例如,在图4中,下限制件166a比导引件116a更靠近外表面22)。例如,当从侧面观看把手100a时(例如,图6a中的视图),导引件116a定位于上限制件164a与下限制件166a之间。在实施例中,一个上限制件164a及一个下限制件166a可沿着锁定机构150a的每一侧设置。
93.在实施例中,限制件166a中的一者是可弯曲的(例如,可在宽度w的方向上弯曲),以允许锁定机构150a与把手100a分开形成且接着按扣到导引件116a中。限制件164a、166a经配置以防止锁定机构150a在被按扣到导引件116a之后的移除。在另一实施例中,把手100a可经形成(例如,经模制等)为具有与主体110a成一体且在导引件116a中的锁定机构150a,且将锁定机构150a连接到主体110a的部分形成为断裂的,使得锁定机构150a变成可滑动地附接到主体110a。
94.把手100a的主体110a包含通孔118a及保持空间119a。在实施例中,保持空间119a设置于在把手100a经附接时面对晶片载体1的侧12的外表面22的主体110a的后部102a(图6a)中。例如,当把手100a附接到晶片载体1的侧12时,保持空间119a定位于主体110a与晶片载体1的侧12的外表面22之间。通孔118a连接到保持空间119a。通孔118a邻近于在把手100a的主体110a的端112a、114a之间的可插入部件130a。保持空间119a定位于通孔118a与可插入部件130a之间。锁定机构150a经配置以穿过通孔118a延伸到保持空间119a中。
95.如图6a及6c中所展示,保持空间119a沿着把手100a的后部102a敞开。但是,在实施例中,保持空间119a沿着把手100a的后部102a围封。例如,在此实施例中,通孔可延伸穿过主体110a,且保持空间119a可为通孔内的较大体积。
96.图8a是沿着图3中的线viii-viii的晶片载体1的剖面图。图8b是图8a中的区域b的放大图。图8c是图8a中的区域c的放大图。为了清楚且更容易比较,如图8b中所展示的区域b相对于图8a反转及旋转,且如图8c中所展示的区域c相对于图8a旋转。
97.锁定机构150a具有锁定状态及解锁状态。把手100a、100b中的每一者包含锁定机构150a、150b(图1及2)。第一把手100a的锁定机构150a在图8a及8c中被展示为处于锁定状态。第二把手100b的锁定机构150b在图8a及8b中被展示为处于解锁状态。图8b中的锁定机构150b通过在第一方向d1上移动而从其解锁状态移动到锁定状态(其由图8c中的锁定机构150a展示)。通过施加力到柔性延伸部160a且接着使锁定机构150a在相反方向d2上移动而使图8c中的锁定机构150a从其锁定状态移动到解锁状态(其由图8b中的锁定机构150a展示)。
98.锁定机构150a经配置为可相对于可插入部件130a移动。例如,锁定机构150a可选择性地移动,这是因为柔性延伸部160a在锁定状态抑制锁定机构150a的移动,直到被外力
作用,如下文进一步详细论述。
99.在图8b中,锁定机构150b处于解锁状态。处于解锁状态的锁定机构150b允许突片132b从其接合状态移动。例如,锁定机构150b允许可插入部件130b挠曲达到使突片132b从其接合状态移动的量。在处于解锁状态时,锁定机构150b的接触表面156b仍可能接触可插入部件130b的背表面136b。在另一实施例中,在处于解锁状态时,接触表面156b可未接触可插入部件130b。处于其解锁状态的锁定机构150b允许可插入部件130b挠曲远离突出部30b,这使突片132b从突出部30b脱离。在实施例中,当柔性部件160b安置于保持空间119b外部时,锁定机构150b处于锁定状态。锁定机构150b在方向d1上移动,且在柔性部件160b定位于保持空间119b中时移动到锁定状态。
100.在图8c中,突片132a处于接合状态且锁定机构150a处于锁定状态。例如,图8c中的突片132a经定位成在使把手100a在方向d2上移动(例如,拉动)时接触突出部30a的前外表面38a,这防止可插入部件130a从孔隙32a被移除。处于锁定状态的锁定机构150a经配置以将突片132a维持在接合状态。突片132a在第一方向d3上从可插入部件130a延伸,且通过在相反方向d4上移动而移出接合状态。在锁定状态,锁定机构150a的位置防止突片132a从接合状态移动。在锁定状态,锁定机构150a的接触表面156a的位置通过限制可插入部件130a的挠曲而限制突片132a在相反方向d4上移动。例如,在锁定状态,锁定机构150a的接触表面156a的位置防止突片132a从接合状态移除。在实施例中,当锁定机构150a处于锁定状态时,锁定机构150a的接触表面156a接触可插入部件130a。通过锁定机构150a的这种接触防止可插入部件130a的挠曲。在实施例中,锁定机构150a可在未接触可插入部件130a的情况下将突片132a维持在接合状态。例如,需要可插入部件130a的最小挠曲量以使突片132a从接合状态移动。在锁定状态,锁定机构150a的接触表面156a防止可插入部件130a达到最小挠曲量。
101.锁定机构150a延伸到孔隙32a中且沿着突片132a的背侧136a延伸。可插入部件130a安置于锁定机构150a的接触表面156a与突出部30a的内表面38a之间。锁定机构150a的厚度t1通过限制可插入部件130a的挠曲而将突片132a维持在接合状态。在图8c中,锁定机构150a的厚度t1阻止可插入部件130a挠曲及使突片132a移动。厚度t1垂直于可插入部件130a从把手100a的主体110a延伸到孔隙32a中的方向d1延伸。
102.柔性延伸部160a经配置为可通过外力f1挠曲(例如,可相对于锁定机构150a的其余部分弯曲)。例如,外力f1可通过想要使锁定机构150a移动的人施加。保持空间119a可防止意外接触施加外力f1到柔性延伸部160a。柔性延伸部160a的定位防止锁定机构150a在与第一方向d1相反的方向d2上移动。
103.锁定机构150a可选择性地移动,这是因为柔性延伸部160a经配置以限制锁定机构150a从锁定状态移动,除非通过外力f1挠曲。锁定机构150a通过在方向d1上移动而从解锁状态移动到锁定状态。锁定结构150a在第一方向d1上的移动使柔性延伸部160a移动穿过通孔118a且到保持空间119a中。在实施例中,当柔性延伸部160a定位于保持空间119a中时,锁定机构150a进入锁定状态。
104.保持空间119a相对于通孔118a的大小允许柔性延伸部160a至少部分不挠曲。柔性延伸部160a在保持空间119a内的正常几何结构(即,在未被外力f1作用时)在方向d2上未与通孔118a对准(例如,匹配、配合于其内)。这种未对准防止柔性延伸部160a配合到通孔118a
中,且防止锁定机构150a在方向d2上的移动(这将使锁定机构150a从锁定位置移动)。因此,柔性延伸部160a在保持空间119a中的位置将锁定机构150a维持在锁定状态。外力f1使柔性延伸部160a挠曲且导致柔性延伸部160a在方向d2上与通孔119a对准,这允许柔性延伸部160a配合到通孔118a中。因此,通过施加外力f1到柔性延伸部160a且使锁定机构150a在方向d2上移动(这使柔性延伸部160a从保持空间119a移动到通孔118a中)而使锁定机构150a从锁定状态移动到解锁状态。在实施例中,当柔性延伸部160a定位于保持空间119a外部时,锁定机构150a进入解锁状态。在实施例中,当柔性延伸部160a定位于通孔118a及保持空间119a两者外部时,锁定机构150a进入解锁状态。
105.在实施例中,柔性延伸部160a与通孔118a在第二方向d2上未对准是因锁定机构150a的宽度w所致。如图7中所展示,锁定机构150a具有由柔性延伸部160a界定的宽度w。在实施例中,柔性延伸部160a经配置为通过外力f1挠曲,使得锁定机构150a的宽度w变化(例如,减小)。例如,锁定机构在外力f1使柔性延伸部160a挠曲时具有宽度w1。在实施例中,外力f1可压缩柔性延伸部160a以减小锁定机构150a的宽度w。柔性延伸部160a经配置以被压缩而不会永久变形。
106.如图6b中所展示,通孔118a具有宽度w2且保持空间119a具有宽度w3。保持空间119a的宽度w3大于通孔118a的宽度w2。当使锁定机构150a从解锁位置(如由图8b中的锁定机构150b展示)移动到锁定位置(如由图8c中锁定机构150a展示)时,柔性延伸部160a从通孔118a移动到保持空间119a中。保持空间119a的较大宽度w3(相对于通孔118a的宽度w2)允许柔性延伸部160a在保持空间119a中至少部分不挠曲。柔性延伸部160a的这种不挠曲导致锁定机构150a的宽度w(例如,沿着柔性延伸部160a)大于通孔118a的宽度w2。因此,锁定机构150a在锁定状态的正常宽度w(即,在未被外力f1作用时)大于通孔118a的宽度w2。当外力f1使柔性延伸部160a挠曲时,锁定机构150a的宽度w1等于或小于通孔118a的宽度w2。因此,通过使柔性延伸部160a挠曲以减小锁定机构150a的宽度w且接着使锁定机构150a在第二方向d2上移动,锁定机构150a从解锁状态移动到锁定状态。
107.因此,当安置于保持空间119a中时,柔性延伸部160a的几何结构将锁定机构150a维持在锁定状态。例如,当锁定机构150a通过在第一方向d1上移动而从解锁状态移动到锁定状态时,柔性延伸部160a在保持空间119a中的几何结构接着防止锁定机构150a在相反方向d2上移动。在实施例中,将锁定机构150a维持在锁定状态的柔性延伸部160a的几何结构是锁定机构150a的宽度w,如上文所描述。
108.可使柔性延伸部160a挠曲以使锁定机构150a从解锁状态移动到锁定状态。在实施例中,通孔118a及柔性延伸部160a中的一者或两者可经配置使得使锁定机构150a在第一方向d1上移动的力还使柔性延伸部160a挠曲以穿过通孔118a配合。例如,当处于解锁状态时,在锁定机构150a处于解锁位置时面对彼此的通孔118a的表面及柔性延伸部160a的表面中的一或多者可为倾斜的。
109.锁定机构150a的上表面158a相对于可插入部件130a大体上平坦。但是,在实施例中,锁定机构150a可具有凹形上表面158a及在柔性延伸部160a安置于保持空间119a中时将接触表面156a定位于孔隙32a外部的长度l。上表面158a的凸形形状允许可插入部件130a的足够挠曲以使突片132a从其接合状态移动到未接合状态。在此实施例中,锁定机构150a可通过在与第一方向d1相反的方向d2上移动而从其锁定状态移动到解锁状态。当柔性延伸部
160a安置于保持空间119a中时,锁定机构150a处于解锁状态,且当柔性延伸部160a安置于保持空间119a外部时,其处于锁定状态。在此实施例中,柔性延伸部160a可经配置以在处于锁定状态时抑制锁定机构150a在方向d1上的移动,如上文类似地论述,只有关于在方向d2上的移动除外。例如,在此实施例中,以如上文论述的相同方式防止柔性延伸部160a插入到通孔118a中,只有相对于方向d1而非方向d2除外。
110.如图4及8c中所展示,当在拆卸方向d2上拉动把手100a时,处于接合状态的突片132a经配置以接触突出部30a的前外表面38a以防止可插入部件130a从孔隙32a移除。但是,在实施例中,凹口(未展示)可设置于孔隙32a内,且突片132a可经配置以通过与凹口接合而防止可插入部件130a的移除。例如,凹口可设置于突出部30a的内表面38a中或晶片载体1的外表面22中。在此实施例中,可插入部件130a可仅部分延伸穿过孔隙32a。在此实施例中,在处于其锁定状态时,锁定机构150a的部分可安置于突出部30a与可插入部件130a之间。在实施例中,突片132a可在不同于远离晶片载体1的外表面22(例如,不同于图8c中的方向d3)的方向上从可插入部件130a延伸。例如,在实施例中,突片132a可从可插入部件130a延伸朝向晶片载体1的外表面22(例如,在方向d4上,等等),或在垂直于远离晶片载体1的外表面22的方向的方向上(例如,在图9中的方向d5上,等等)延伸。
111.如上文所论述,可插入部件130a经配置以在穿过孔隙32a插入时自动使突片132a挠曲到接合状态。但是,在实施例中,可插入部件130a可未经配置以使突片132a挠曲到接合状态。在实施例中,锁定机构150a可使可插入部件130a挠曲以使突片132a挠曲到接合位置。例如,突片132a可在可插入部件130a的前表面134a上,且可插入部件可需要在第二方向d2上挠曲以使突片132a挠曲到接合状态。在移动到锁定状态时,锁定机构150a可经配置以在第二方向d2上推动可插入部件130a以使突片132a挠曲到接合状态。
112.图9是沿着图4中的线ix-ix的晶片载体1的部分的剖面图。把手100a的第一突出部170a与晶片载体1的第一轨道50a接合。更具体来说,第一突出部170a经配置以与第一轨道50a互锁。
113.突出部170a包含第一部分172a及直接连接到第一部分172a的第二部分174a。第一部分172a在第一方向d4上延伸远离把手100a的主体110a,且第二部分174a在不同方向d5上延伸远离第一部分172a。第一部分172a的方向d4与主体110a的第一端112a不成平面。在实施例中,第一轨道50a延伸远离晶片载体1的侧12的外表面22。第一轨道50a包含内表面52a及槽54a。槽54a由内表面52a界定。突出部170a延伸到轨道50a的槽54a中。内表面52a及轨道50a与突出部170a的第二部分174a之间的接触经配置以防止经附接把手100a移动远离晶片载体1的外表面22(例如,在方向d3上的移动)。第二轨道60a及第二突出部180a具有与针对第一轨道50a及第一突出部180a所描述类似的结构及接合,只有经旋转除外,因为突出部轨道180a沿着把手100a的第二端114a安置。
114.如图3中所展示,晶片齿20附接到晶片载体1的侧12、14。在把手100a上拉动的力(例如,在方向d3上)可导致侧12向外偏转,这可能影响晶片齿20的外形且损坏晶片齿20中的晶片。例如,轨道50a、60a及突出部170a、180a提供更刚性的接触点(例如,在边角处或附近)以用于将把手100a附接到晶片载体1的外表面22。更刚性的接触点可通过将拉力从把手100a分布到晶片载体1的边角而帮助减轻侧12的向外偏转。
115.由第一轨道50a界定的槽54a在图9中面朝上(即,在方向d5上)。但是,在实施例中,
第一轨道50a及第二部分174a的方向可反转。例如,在此实施例中,槽54a可面朝下(即,与方向d5相反)。在实施例中,第二轨道60a及第二突出部180a也可以这种方式修改。
116.晶片载体1的把手100a具有两个可插入部件130a、140a、两个轨道170a、180a及一个锁定机构150a。但是,在实施例中,把手100a可具有不同数量的可插入部件130a、140a、轨道170a、180a及锁定机构150a。在实施例中,把手100a可包含一或多个可插入部件130a、140a。在实施例中,把手100a可包含一或多个轨道170a、180a。在此实施例中,晶片载体1可包含对应数量的突出部30a、40a及轨道50a、60a。在实施例中,晶片载体1可包含用于把手100a的多个锁定机构150a。例如,在实施例中,晶片载体1可为把手100a的可插入部件130a、140a中的每一者提供相应锁定机构。
117.在图1到9中展示且在上文描述的把手100a、100b及锁定机构150a、150b是用于晶片载体1。但是,应了解,把手100a、100b、锁定机构150a、150b及突出部30a、30b可类似地应用于其它类型的晶片载体,例如但不限于以如针对晶片载体1展示及描述的类似方式应用于前开式运输盒(fosb)。在实施例中,前开式运输盒(fosb)可包含至少突出部30a、30b、把手100a、100b及用于把手100a、30b的锁定机构150a、150b。
118.图10到12说明根据另一实施例的锁定机构350a。图10是foup 300的部分的透视图。图11是锁定机构350a的正透视图。图12是锁定机构350a的后透视图。
119.foup 300包含类似于图1到5中的晶片载体1的把手100a、100b。因此,foup 300还包含类似于锁定机构350a的用于晶片载体1的第二把手100b的第二锁定机构。
120.图10展示处于锁定位置的锁定机构350a。在处于解锁位置时,锁定机构350a与把手100a及晶片载体1分离,且通过将锁定机构耦合到把手350a而将其移动到锁定位置。锁定机构350a具有锁定状态及解锁状态。锁定机构350a通过被耦合到把手100a而从解锁状态移动到锁定状态。当处于锁定状态时,锁定机构350a将可插入部件130a的突片138a维持在其接合状态。图10中未标记突片132a,这是因为其在图10的视图中被锁定机构350a遮挡。更具体来说,锁定机构350a在其锁定状态经配置以防止突片138a的移动,所述移动将使突片138a从其接合状态移除。锁定机构350a通过从把手350a脱离而从锁定状态移动到解锁状态。
121.如图11及12中所展示,锁定机构350a具有前端352a、后端354a、内表面366a及长度l2。锁定机构350a具有大体凹形形状。锁定机构350a包含安置于前端352a处的第一突片356a及安置于后端354a处的第二突片357a。第一突片356a及第二突片357a具有类似结构。第一突片356a及第二突片357a各自从锁定机构350a的内表面366a延伸。在实施例中,第一突片356a及第二突片357a各自在平行于锁定机构350a的长度l2的方向上从内表面366a延伸。锁定机构350a用第一突片356a及第二突片357a耦合到把手100a。
122.当锁定机构350a处于其锁定状态时,第一突片356a接触可插入部件130a的背侧136a(图6c中所展示),且第二突片357a插入到把手100a的通孔118a中。例如,当处于锁定状态时,第一突片356a被钩在可插入部件130a的端138a上,且第二突片357a被钩在通孔118a中。在实施例中,用于突片357a的通孔118a可代替性地为盲孔。当耦合到把手100a时,第一突片356a压抵于可插入部件130a的背侧136a。在锁定状态,通过锁定机构350a对可插入部件130a的这种压力防止可插入部件130a挠曲朝向晶片载体1的外表面22,且防止突片132a从接合状态移动。因此,锁定机构350a维持突片132a的接合状态。
123.锁定机构350a延伸大于其正常长度l2(即,在无外力f2、f3施加到锁定机构350a时的长度)的长度。用于耦合到把手100a及从把手100a耦合的长度大于长度l2。锁定机构350a经配置为柔性的,使得外力(例如,力f2、力f3)可增加锁定机构350a的长度l2。在实施例中,锁定机构350a在第一端352处的部分是柔性延伸部353a。在无外力f2、f3施加到锁定机构350a时,可延伸延伸部353a保持其几何结构且维持长度l2。可延伸部分353a的位置保持锁定机构350a耦合到把手100a。因此,可延伸部分353a的几何结构将锁定机构350a维持在其锁定状态。
124.当锁定机构350a处于其锁定状态时,可通过沿着第一端352a或第二端354a施加外力(例如,力f2、力f3)到锁定机构350a的内表面366a而使其移动到其解锁状态(即,脱离)。例如,外力f2、f3导致可延伸延伸部353a延伸且增加锁定机构350a的长度l2。较大长度l2使锁定机构350a从把手100a脱离。
125.图10到12中的锁定机构350a的所说明实施例在处于解锁状态时与把手100a分离(即,在解锁状态从把手100a脱离)。但是,在实施例中,把手100a及锁定机构350a可为单个整体件。在此实施例中,后端354a可与把手100a的主体110a一体地连接。前端353a可相对于可插入部件130a挠曲,使得前端353a经配置为在方向d3上被拉离可插入部件130a,以允许突出部30a配合于前端353a与可插入部件130a之间,以将把手100a从晶片载体1拆卸。
126.锁定机构350a在图10到12中展示且在上文被描述为用于foup 300。但是,应了解,把手100a、锁定机构350a及突出部30a可类似地应用于其它类型的晶片载体,例如但不限于前开式运输盒(fosb)。在实施例中,晶片载体可以如针对foup 300展示及描述的类似方式包含把手100a、突出部30a及用于把手100a的锁定机构350a。在实施例中,晶片载体可包含一对突出部30a、30b、一对把手100a、100b及一对锁定机构350a。
127.图13到16说明根据另一实施例的锁定机构450a。图13是foup 400的部分的透视图。图14是锁定机构450a的正透视图。图15是锁定机构450a的后透视图。图16是沿着图13中的线xvi-xvi的foup 400的部分剖面图。
128.foup 400包含类似于图1到4中的晶片载体1的可拆卸把手100a、100b。因此,foup 400包含类似于锁定机构450a的用于晶片载体1的第二把手100b的第二锁定机构。
129.锁定机构450a具有锁定状态及解锁状态。图13及16展示处于锁定状态的锁定机构450a。锁定机构450a通过在与可插入部件130a到孔隙32a中的插入方向d1相反的方向d2上被插入到孔隙32a中而从解锁状态移动到锁定状态。锁定机构450a通过在方向d1上移动而从锁定状态移动到解锁状态。
130.如图14到16中所展示,锁定机构450a具有前端452a、后端454a、长度l3、唇缘453a、偏置部件458a及柔性延伸部460a。柔性延伸部460a包含具有第一突片463a的第一臂462a及具有第二突片465a的第二臂464a。在实施例中,锁定机构450a的长度l3平行于可插入部件130a从把手100a的主体110a延伸的方向延伸。锁定机构450a的长度l3垂直于其厚度t2。
131.当锁定机构450a处于其锁定状态时,偏置部件458a接触晶片载体1的外表面22且将接触表面456a推动到与可插入部件130a的背侧136a接触。可插入部件130a经挤压在锁定机构450a的接触表面456a与突出部30a的内表面38a之间。偏置部件464a经配置以为锁定部件450a提供厚度t2,所述厚度t2防止可插入部件130a的挠曲。偏置部件464a经配置以为锁定部件450a提供厚度t2,所述厚度t2防止可插入部件130a的挠曲。在实施例中,偏置部件464a
经配置以为锁定机构450a提供厚度t2,所述厚度t2至少防止可插入部件挠曲到允许突片132a从其接合位置移动的最小量。这防止可插入部件130a使突片134a从其接合状态挠曲。因此,锁定机构450a在其锁定状态维持突片134a的接合状态。
132.唇缘453a定位于锁定机构450a的前部452a处。唇缘453a经配置以限制可将锁定机构450a插入到孔隙32a中多远。唇缘延伸在接触表面453a上方。当锁定机构450a移动到锁定状态时,唇缘453a接触可插入部件130a的端138a且进一步防止锁定机构450a的插入。例如,唇缘453a可防止锁定机构450a被完全插入到孔隙30a中或穿过孔隙30a。
133.在处于锁定位置时,突片463a、465a接触把手100a的内表面121a且无外力f4施加到臂462a、464a。更具体来说,突片463a、465a被钩在把手100a的一或多个内表面121a上。例如,保持空间119a可界定把手100a的内表面121a。突片463a、465a在内表面上的接触防止锁定机构450a在第一方向d1上移动。柔性延伸部460a经配置以供外力f4使臂462a、464a挠曲而更靠近,这减小宽度w4且使臂462a、464a移动远离其对应内表面121。例如,外力f4可通过想要使锁定机构450a移动到解锁位置的人施加。
134.因此,柔性延伸部460a的臂462a、464a的大小及定位将锁定机构维持在其锁定位置。例如,柔性延伸部460a沿着突片463a、465a的宽度w4防止锁定机构450a从其锁定状态移动。
135.如图16中所展示,接触表面456a经配置以在方向d3上抵着可插入部件130a推动。但是,如上文所论述,在实施例中,可插入突片132a经配置以在不同于远离晶片载体1的外表面22(例如,不同于方向d3)的方向上从可插入部件130a延伸。在此实施例中,锁定机构450a可经配置以在适当方向上抵着可插入部件130a推动,使得可插入部件130a的突片132a被维持在其接合状态。例如,锁定机构450a可延伸在突出部30a与可插入部件130a的前侧134a之间,且经配置以将可插入部件130a推向晶片载体1的外表面22,或经配置以在垂直于方向d1及方向d3的方向上推动可插入部件130a。
136.锁定机构450a在图13到16中展示且在上文被描述为用于foup 400。但是,应了解,把手100a、锁定机构450a及突出部30a可类似地应用于其它类型的晶片载体,例如但不限于前开式运输盒(fosb)。
137.图17到21展示根据本公开的另一实施例的晶片载体500及把手510的各种实施例。
138.图17是根据本公开的另一实施例的包含把手510及锁定机构520a、520b的晶片载体500的侧视图。晶片载体500可为如本文中所描述的foup或fosb,且可具有与本文中所描述的晶片载体1相同的许多特征。在一个实施例中,晶片载体500是foup。把手510包含与上文特别关于图6a到6c论述的把手100a相同的许多特征。所属领域的技术人员将了解,晶片载体500包含在晶片载体500的相对侧壁上具有与把手510相同的特征的第二把手,其在此处为简洁起见并未展示。
139.如图17中所展示,把手510与设置于晶片载体504的侧壁506上的轨道50a、60a接合。轨道50a、60a先前在本文中运用例如(举例来说)在图5中最佳可见的轨道50a、60a进行描述。把手510包含把手主体512,以及设置于把手主体512的上端524处的第一锁定机构520a及设置于把手主体512的下端526处的第二锁定机构520b。锁定机构520a、520b中的每一者经配置以保持在设置于把手主体512的上端524及下端526中的每一者处的垂直导引件530a、530b内,使得其能够在垂直导引件530a、530内滑动以从解锁状态转变到锁定状态。锁
定机构520a、520b可通过保持空间519a、519b保持在锁定状态。在图17中,锁定机构520a被描绘为处于解锁状态且锁定机构520b被描绘为处于锁定状态。
140.图18a到18c展示把手510的不同视图。图18a展示包含各自处于解锁状态的锁定机构520a、520b的把手510。图18b是把手510的正视图,其中锁定机构520a、520b经移除使得锁定机构520a、520b保持于其中的垂直导引件530a、530b及从解锁状态到锁定状态的转变可见。图18c是把手510的侧视图。像本文中所描述的把手100a,把手510包含经配置以接合轨道50a、60a且沿着轨道50a、60a滑动的上突出部580a及下突出部580b。上突出部580a及下突出部580b具有与轨道50a、60a的形状互补的形状。在一些实施例中,上突出部580a及下突出部580b具有界定导引件582a、582b的向下延伸l形,这促进将上突出部580a及下突出部580b保持在轨道50a、60a上且沿着轨道50a、60a滑动。
141.图19展示孤立的锁定机构520a。图20a及20b分别展示设置于把手主体512的上端524处的第一锁定机构520a及设置于把手主体512的下端526处的第二锁定机构520b的特写图。图21是展示处于锁定状态的锁定机构520b的横截面视图。
142.锁定机构520a、520b经配置以防止把手510从晶片载体500的非预期拆卸。锁定机构520a、520b经配置以保持在垂直导引件530a、530b(在图18b中最佳可见)中,以能够在从解锁状态转变到锁定状态时在垂直导引件530a、530b内滑动。图20a展示处于解锁状态的锁定机构520a。图20b展示处于锁定状态的锁定机构520b。
143.现参考图19,锁定机构520a包含第一端552a及第二端554a以及定位于第一端552a与第二端554a之间的柔性延伸部560a。锁定机构520包含设置于第一端552a处的上限制件564a及下限制件566a。在实施例中,一个上限制件564a及一个下限制件566a可沿着锁定机构520a的每一侧设置。在实施例中,限制件566a中的一者是可弯曲的(例如,可在宽度w的方向上弯曲),以允许锁定机构530a与把手510分开形成且接着按扣到垂直导引件530a中。上限制件564a及下限制件566a经配置以防止锁定机构520a在被按扣到垂直导引件530a之后移除。
144.如图20a及20b中最佳可见,锁定机构520a、520b通过两个限制件564a、564b及564a、566b与垂直导引件530a、530b的相互作用可滑动地附接到把手主体512。分别地,上限制件564a、564b定位于界定垂直导引件530a、530b的壁的上表面上方,且下限制件566a、566b定位于界定垂直导引件530a、530b的壁的下表面下方,使得界定垂直导引件530a、530b的壁定位于锁定机构520a、520b的上限制件564a、564b与下限制件566a、566b之间。
145.柔性延伸部560a经配置以响应于施加力而从具有第一宽度的第一状态向具有小于第一宽度的第二宽度的第二状态向内挠曲朝向中心线x。在第二状态,当锁定机构520a转变到锁定状态时,柔性延伸部560a可被接纳在保持空间519a内。
146.图20b及21是展示处于锁定状态的锁定机构520b的不同视图。如先前所指示,锁定机构520b包含与本文中所描述的锁定机构520a相同的特征。如图20b及21中所展示,在锁定机构520b处于锁定状态时,柔性延伸部560b被保持在保持空间519b内。在释放施加到柔性延伸部560b的力时,柔性延伸部可从第二状态转变到第一状态,从而导致柔性延伸部560b被保持在保持空间519b中。为了使锁定机构520b从锁定状态转变到解锁状态,可再次施加力到柔性延伸部560b,使得柔性延伸部560b处于第二状态且具有小于保持空间519的宽度的宽度,从而允许其移除。
147.另外,在一些实施例中,第二端554a经定大小以在锁定机构520a处于锁定状态时被接纳且保持在设置于轨道50a中的对应孔隙内。锁定机构520b以相同方式与轨道60a接合。在一些实施例中,轨道60a可具备孔隙,所述孔隙经定大小以在锁定机构520b处于锁定状态时接纳及保持锁定机构520b的第二端。
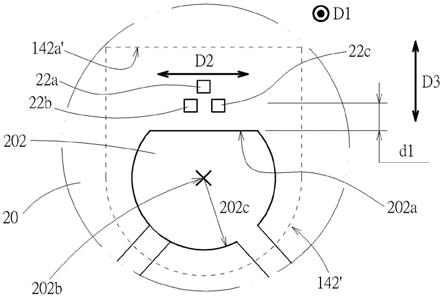
148.图22到26展示根据本公开的另一实施例的晶片载体600及把手610的各种视图。晶片载体600包含与本文中所描述的晶片载体1及500相同的许多特征。晶片载体600可为foup或fosb。在一个实施例中,晶片载体600是foup。
149.图22展示晶片载体600,其包含在附接到设置于晶片载体600的侧壁606上的轨道50a、60之前的把手610。图23展示包含附接到晶片载体的侧壁606的把手610的晶片载体600。所属领域的技术人员将了解,晶片载体600在晶片载体600的相对侧壁上包含具有与把手610相同的特征的第二把手,其在此处为简洁起见并未展示。
150.如图23中所展示,把手510与设置于晶片载体600的侧壁606上的轨道50a、60a接合。轨道50a、60a先前在本文中运用例如(举例来说)在图5中最佳可见的轨道50a、60a进行描述。把手610包含把手主体612,以及设置于把手主体612的上端624处的第一锁定机构520a及设置于把手主体612的下端626处的第二锁定机构620b。锁定机构520a、520b详细参考图19进行描述。锁定机构520a、520b中的每一者经配置以保持在设置于把手主体612的上端624及下端626中的每一者处的垂直导引件630a、630b内,使得其能够在垂直导引件630a、630内滑动以从解锁状态转变到锁定状态。
151.在图22到26中所展示的实施例中,保持空间619b及垂直凹槽630b从延伸穿过把手主体612的下端626的中心线x2偏移。在参考图17到21描述的先前实施例中,保持空间619b及垂直凹槽630b以延伸穿过把手主体512的下端526的中心线x2为中心。代替与设置于轨道60中的孔隙合作,当锁定机构524b处于锁定状态时,锁定机构524b的第二端554b邻接轨道60a的端,如下文将更详细描述。在一些情况中,定位于把手610的上端624处的保持空间619a及垂直凹槽630a也可定位于把手主体的上端524上,使得当锁定机构524a处于锁定状态时,第二端554a邻接轨道50a的端。
152.图24a到24c展示把手610的不同视图。图24a展示包含各自处于解锁状态的锁定机构520a、520b的把手610。图24b是把手610的正视图,其中锁定机构520a、520b经移除使得锁定机构520a、520b保持于其中的垂直导引件630a、630b及从解锁状态到锁定状态的转变可见。图24c是把手610的侧视图。像本文中所描述的把手100a及510,把手610包含经配置以接合轨道50a、60a且沿着轨道50a、60a滑动的上突出部680a及下突出部680b。上突出部680a及下突出部680b具有与轨道50a、60a的形状互补的形状。在一些实施例中,上突出部680a及下突出部680b具有界定导引件682a、682b的向下延伸l形,这在把手610固定到晶片载体600的侧壁606时,促进将上突出部680a及下突出部680b保持在轨道50a、60a上且沿着轨道50a、60a滑动。
153.图25a及25b是展示处于锁定状态的锁定机构520a、520b的特写图。锁定机构520a、520b可通过保持空间619a、619b保持在锁定状态。在释放施加到柔性延伸部560a、560b的力时,柔性延伸部560、560b可从第二状态转变到第一状态,从而导致柔性延伸部560a、560b被保持在保持空间619a、619b中。为了使锁定机构520a、520b从锁定状态转变到解锁状态,可再次施加力到柔性延伸部560a、560b,使得柔性延伸部560a、560b处于第二状态且具有小于
保持空间619a、619b的宽度的宽度,从而允许其移除。
154.图26是把手主体612的上端624的部分横截面视图,其展示处于锁定状态且与轨道50a接合的锁定机构520a。如图26中可见,柔性延伸部560a被接纳及保持在保持空间619a中,且锁定机构520a的第二端554a邻接轨道50a的远端558。这防止把手610意外地从轨道50a卸下。
155.图27到30展示根据本公开的另一实施例的晶片载体700及把手710的各种视图。晶片载体700包含与本文中所描述的晶片载体1、500及600相同的许多特征。晶片载体700可为foup或fosb。在一个实施例中,晶片载体700是foup。
156.图27展示晶片载体700,其包含在与设置于晶片载体700的侧壁706上的轨道50a、60a附接之前的把手710。图28展示包含附接到晶片载体700的侧壁7606的把手710的晶片载体700。图30是孤立的把手710的视图。所属领域的技术人员将了解,晶片载体700包含在晶片载体700的相对侧壁上具有与把手710相同的特征的第二把手,其在此处为简洁起见并未展示。
157.如图28及29中所展示,把手710与设置于晶片载体700的侧壁706上的轨道50a、60a接合。轨道50a、60a先前在本文中运用例如(举例来说)在图5中最佳可见的轨道50a、60a进行描述。把手710包含把手主体712,以及设置于把手主体712的上端724处的第一锁定臂720a及设置于把手主体712的下端726处的第二锁定臂720b。锁定臂720a、720中的每一者的远端760a、760b经配置以接合轨道50a、50b中的每一者的远端758a、758b。在一些实施例中,远端760a、760b可配置为倒钩、卡掣或可通过保持力与轨道50a、60a的远端758a、758b接合的其它突出部(图28及29)。
158.锁定臂720a、720b中的每一者是柔性的,使得其可在把手710附接到晶片载体700时向外挠曲且远离载体侧,且沿着轨道50a、60a中的每一者的外表面750跨骑。在到达轨道50a、50b的远端758a、758b时,柔性臂720a、720b中的每一者经配置以向内往回挠曲朝向晶片载体700的侧壁706,使得柔性臂720a、720b中的每一者的远端760a、760b与轨道50a、50b中的每一者的远端758a、758b接合且保持在其上,如在图29中最佳可见。
159.方面:方面1到13中的任一者可与方面14到23中的任一者组合。
160.方面1.一种用于晶片载体的把手,所述晶片载体包含从所述晶片载体的外表面延伸的突出部,所述突出部在所述晶片载体的所述外表面与所述突出部的范围之间界定孔隙以用于附接所述把手,所述把手包括:主体,其包含:第一端及与所述第一端相对的第二端,及可插入部件,其安置于所述主体的所述第一端与所述第二端之间且经配置以插入到所述孔隙中以将所述把手固定到所述晶片载体,所述可插入部件包含在处于接合状态时将所述可插入部件保持在所述孔隙中的突片;及锁定机构,其可相对于所述可插入部件在锁定状态与解锁状态之间移动,所述锁定机构包含柔性延伸部,且在所述锁定状态,所述锁定机构将所述突片维持在所述接合状态,且所述柔性延伸部经定位以将所述锁定机构维持在所述锁定状态。
161.方面2.根据方面1所述的把手,其中所述把手经配置以附接所述晶片载体且从所述晶片载体非破坏性地拆卸。
162.方面3.根据方面1或2中任一者所述的把手,其中所述突片安置于所述可插入部件的第一侧上,且当处于所述锁定状态时,所述锁定机构沿着与所述第一侧相对的所述可插
入部件的第二侧延伸。
163.方面4.根据方面1到3中任一者所述的把手,其中当处于所述锁定状态时,所述锁定机构的厚度将所述突片维持在所述接合状态。
164.方面5.根据方面1到4中任一者所述的把手,其中当所述锁定机构处于所述锁定状态时,所述柔性延伸部的几何结构将所述锁定机构维持在所述锁定状态。
165.方面6.根据方面1到5中任一者所述的把手,其中所述柔性延伸部经配置为可挠曲到较小几何结构或不同位置,且允许所述锁定机构响应于外力使所述柔性延伸部挠曲到所述较小几何结构或所述不同位置而从所述锁定状态移动。
166.方面7.根据方面1到6中任一者所述的把手,其中所述主体包含邻近于所述可插入部件安置于所述主体中的导引件,所述锁定机构由所述导引件保持,使得所述锁定机构可滑动地附接到所述主体。
167.方面8.根据方面1到7中任一者所述的把手,其中所述可插入部件安置于握把的端处,安置于所述第一端处,或安置于所述握把与所述第一端之间。
168.方面9.根据方面1到8中任一者所述的把手,其进一步包括:突出部,其从所述主体的所述第一端在第一方向及第二方向上以所述顺序延伸,所述第一方向远离所述主体且与所述主体的所述第一端不成平面,且所述第二方向不同于所述第一方向,其中所述突出部经配置以接合所述晶片载体的轨道以将所述把手固定到所述晶片载体。
169.方面10.根据方面1到9中任一者所述的把手,其中所述可插入部件可相对于所述主体的其余部分挠曲,且所述突片可因所述可插入部件的所述挠曲而移动到所述接合状态。
170.方面11.根据方面1到10中任一者所述的把手,其中所述锁定机构延伸穿过所述主体。
171.方面12.根据方面1到11中任一者所述的把手,其中所述锁定机构延伸穿过所述主体的通孔,且当处于所述锁定状态时,所述柔性延伸部导致所述锁定机构的宽度大于所述通孔的对应宽度。
172.方面13.根据方面1到12中任一者所述的把手,其中所述主体包含安置于所述主体的所述第一端与所述第二端之间的握把。
173.方面14.一种晶片载体,其包括:外表面;突出部,其从所述外表面延伸,所述突出部在所述外表面与所述突出部的范围之间界定孔隙;把手,其经由所述孔隙附接到所述外表面,所述把手包含:主体,其包含第一端、与所述第一端相对的第二端,及安置于所述第一端与所述第二端之间且延伸到所述孔隙中以将所述把手固定到所述外表面的可插入部件,所述可插入部件包含在处于接合状态时将所述可插入部件保持在所述孔隙中的突片;及锁定机构,其可相对于所述可插入部件在锁定状态与解锁状态之间移动,所述锁定机构包含柔性延伸部,且当处于所述锁定状态时,所述锁定机构将所述突片维持在所述接合状态,且所述柔性延伸部经定位以将所述锁定机构维持在所述锁定状态。
174.方面15.根据方面14所述的晶片载体,其中当处于所述锁定状态时,所述锁定机构延伸在所述可插入部件与所述外表面之间,且所述锁定机构的厚度将所述突片维持在所述接合状态。
175.方面16.根据方面14及15中任一者所述的晶片载体,其中所述可插入部件在第一
方向上延伸到所述孔隙中,且所述锁定机构的所述厚度在垂直于所述第一方向的第二方向上延伸。
176.方面17.根据方面14到16中任一者所述的晶片载体,其中当处于所述锁定状态时,所述锁定机构延伸在所述可插入部件与所述外表面之间。
177.方面18.根据方面14到17中任一者所述的晶片载体,其中所述可插入部件在第一方向上插入到所述孔隙中,且所述锁定机构在平行于所述第一方向的第二方向上从所述解锁状态移动到所述锁定状态。
178.方面19.根据方面14、15、17及18中任一者所述的晶片载体,其进一步包括:轨道,其沿着所述外表面延伸,其中所述把手包含从所述主体的所述第一端在第一方向及第二方向上以所述顺序延伸的突出部,所述第一方向远离所述主体且与所述主体的所述第一端不成平面,且所述第二方向不同于所述第一方向,其中所述突出部接合所述轨道以将所述把手固定到所述外表面。
179.方面20.根据方面19所述的晶片载体,其中使所述把手的所述突出部移动以在与所述可插入部件插入到所述孔隙中的相同方向上接合所述轨道。
180.方面21.根据方面19及20中任一者所述的晶片载体,其进一步包括:第一侧,所述外表面由所述第一侧界定,且所述把手沿着所述第一侧延伸,且所述突出部与所述轨道的所述接合抑制所述把手远离或朝向所述第一侧的移动。
181.方面22.根据方面19到21中任一者所述的晶片载体,其进一步包括:槽,其由所述轨道的内表面界定,所述突出部延伸到所述槽中。
182.方面23.根据方面14到22中任一者所述的晶片载体,其中所述晶片载体是前开式晶片盒及前开式运输盒中的一者。
183.已因此描述本公开的若干说明性实施例,所属领域的技术人员将容易明白,可制造及使用在本公开所附的权利要求书的范围内的又其它实施例。已在前文描述中阐述本文档所涵盖的本公开的许多优点。但是,应理解,本公开在许多方面仅为说明性的。在不超出本公开的范围的情况下,可在细节方面,特别是在零件的形状、大小及布置方面作出改变。当然,本公开的范围以表达所附权利要求书的语言来定义。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。