1.本发明涉及医疗器械领域,尤其涉及一种泌尿外科手术机械及手术机器人。
背景技术:
2.尿路是人类的排毒系统,在尿液中存在众多的毒素和沉淀物,尿液是通过肾脏过滤进入尿路,在此新陈代谢过程中,肾脏和尿路往往会形成沉淀物,时间长久造成肾脏和尿路结石。而泌尿外科主要治疗范围包括各种尿结石和复杂性肾结石、肾脏和膀胱肿瘤、前列腺增生和前列腺炎、睾丸附睾的炎症和肿瘤等等。针对需要介入治疗来解决的泌尿外科手术,在手术中经常需要使用内窥镜,再配合手术器械来实施手术。
3.传统的刚性手术器械多为细长的杆状结构,其末端设置有手术执行器,杆状结构通过多杆件串联铰接,采用钢丝绳拉力驱动,使手术器械在铰接关节处实现弯转,由于刚性手术器械尺寸较大,对于泌尿外科手术,使用尺寸偏大的手术器械,不仅影响手术视野的直观性,增加手术操作时间和手术操作的难度和复杂性,而且易造成局部组织的拉扯,使得术后的愈合较不易。另外,由于存在复杂的手眼协同操作需求,传统的刚性手术器械存在灵活度有限、工作范围较小等缺点,进一步限制了其推广应用。随着手术机器人系统的研究和开发,目前开始采用柔性机械臂取代传统的刚性手术器械,极大地提高了手术器械的自由度和柔性,增加了器械运动的灵活性。
技术实现要素:
4.基于以上问题,本发明的目的在于提供一种泌尿外科手术机械,该手术机械尺寸小且能在小尺寸空间范围内实现极高的自由度配置;本发明的另一个目的是提供一种含有该手术机械的手术机器人。
5.为达上述目的,本发明采用以下技术方案:
6.一种泌尿外科手术机械,包括:多个机械臂,多个所述机械臂的远端部分设置成能从一切口或自然腔道进入患者体内;
7.所述机械臂的远端部分包括位于远端的第一柔性段和位于近端的第二柔性段,所述第一柔性段的最大弯曲角度大于所述第二柔性段的最大弯曲角度;
8.所述第一柔性段和所述第二柔性段具有彼此贯通的容纳腔道;
9.所述第一柔性段的远端设有末端执行器和/或摄像装置,所述末端执行器设置成能进行手术操作,所述摄像装置设置成能获取影像。
10.作为本发明的连续体传动机构的优选方案,所述机械臂的远端部分还包括贯穿设置于所述第一柔性段和所述第二柔性段内的柔性连续体结构。
11.作为本发明的连续体传动机构的优选方案,所述柔性连续体结构包括至少一个连续体构节;
12.所述连续体构节包括基盘、止盘和结构骨;
13.所述基盘和所述止盘间隔设置在所述容纳腔道中,所述结构骨的近端穿过所述基
盘,所述结构骨的远端与所述止盘固定连接;
14.所述止盘与末端执行器和/或摄像装置连接。
15.作为本发明的连续体传动机构的优选方案,所述第一柔性段包括依次连接的多个蛇骨关节,每个所述蛇骨关节上均设置有凹槽和凸起,一个所述蛇骨关节的所述凸起能够卡入相邻的另一个所述蛇骨关节的所述凹槽内。
16.作为本发明的连续体传动机构的优选方案,所述第二柔性段为管体,所述第二柔性段的管壁上沿其延伸方向间隔设置有多个狭缝单元,每个所述狭缝单元均包括多个弧状狭缝,所述弧状狭缝沿所述第二柔性段的周向延伸。
17.作为本发明的连续体传动机构的优选方案,所述连续体构节还包括间隔设置于所述基盘与所述止盘之间的多个间隔盘,所述结构骨沿周向依次穿过各所述间隔盘。
18.作为本发明的连续体传动机构的优选方案,所述柔性连续体结构包括两个所述连续体构节;
19.各所述连续体构节的所述结构骨的数量为4根。
20.作为本发明的连续体传动机构的优选方案,所述结构骨为超弹性材料制成的弹性细杆或细管。
21.作为本发明的连续体传动机构的优选方案,多个所述机械臂的近端设有关节联动装置;
22.所述关节联动装置具有至少一个关节。
23.一种手术机器人,包括如上所述的泌尿外科手术机械。
24.本发明的有益效果为:
25.本发明由于采取以上技术方案,其具有以下优点:1、本发明提供的泌尿外科手术机械采用柔性连续体结构,相较传统的通过在关节处相互转动从而实现弯转运动的刚性运动链,柔性连续体结构通过其近端结构变形实现远端结构的弯转变形,其结构主体同时成为驱动的传递结构,因此可在小尺寸空间范围内实现极高的自由度配置。2、本发明提供的泌尿外科手术机械包括第一柔性段和第二柔性段,第一柔性段为蛇骨结构,具有较好的弯曲度,便于顺利完成手术所需的工作位置和姿态;第二柔性段的管壁上沿其延伸方向间隔设置有多个狭缝单元,可以在兼顾预弯曲段的结构刚度的情况下,保证手术工具在通过鞘套进入人体时,以适应管腔内的弯曲状况产生一定的预弯曲,并且能够在第一柔性段发生主动弯曲时,产生一定的适应性弯曲,能够同时满足手术工具的刚度需求和柔性需求,降低了手术操作难度,避免了手术工具磨损、弯折或者损坏,增加了手术工具的使用寿命;刚性段为第一柔性段和第二柔性段顺利伸至人体内的目标手术区域提供刚性作用力。
附图说明
26.为了更清楚地说明本发明实施例中的技术方案,下面将对本发明实施例描述中所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据本发明实施例的内容和这些附图获得其他的附图。
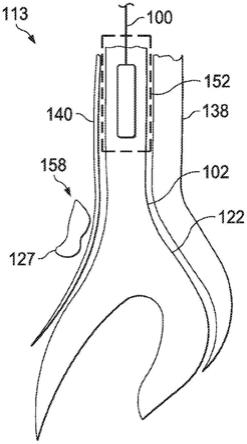
27.图1是本发明具体实施方式提供的手术机器人的结构示意图;
28.图2是本发明具体实施方式提供的手术机器人的部分结构示意图;
29.图3是本发明具体实施方式提供的鞘套结构示意图;
30.图4是本发明具体实施方式提供的鞘套部分截面示意图;
31.图5是本发明具体实施方式提供的鞘套局部示意图;
32.图6是本发明具体实施方式提供的鞘套与外管局部示意图;
33.图7是本发明具体实施方式提供的鞘套与外管配合示意图;
34.图8是本发明具体实施方式提供的第一、第二柔性段的结构示意图;
35.图9是本发明具体实施方式提供的柔性连续体结构的结构示意图;
36.图10是本发明具体实施方式提供的第一柔性段的结构示意图;
37.图11是本发明具体实施方式提供的蛇骨关节的结构示意图;
38.图12是本发明具体实施方式提供的狭缝单元的结构示意图。
具体实施方式
39.为使本发明解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本发明实施例的技术方案作进一步的详细描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、仅用于描述目的,而不能理解为指示或暗示相对重要性。其中,术语“第一位置”和“第二位置”为两个不同的位置。
41.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
42.本发明中的定义靠近操作者的一端为近端或后端,靠近手术患者的一端为远端或前端。
43.如图1、图2、图8和图9所示,本实施例提供一种泌尿外科手术机械,其包括:多个机械臂1,多个机械臂1的远端部分设置成能从一个较小的切口或自然腔道进入患者体内。其中,较小的切口指例如进行泌尿外科手术时的切口,其比常规的普外科腹腔镜手术切口更小。机械臂1的远端部分包括位于远端的第一柔性段2、位于近端的第二柔性段3和贯穿设置于第一柔性段2和第二柔性段3中的柔性连续体结构,第一柔性段2的最大弯曲角度大于第二柔性段3的最大弯曲角度。柔性连续体结构包括至少一个连续体构节4,连续体构节4包括基盘41、止盘42和结构骨43。具体地,第一柔性段2的近端与第二柔性段3的远端固定连接,第一柔性段2和第二柔性段3具有彼此贯通的容纳腔道,柔性连续体结构从第一柔性段2的远端一直延伸至第二柔性段3的近端,然后与驱动机构连接,基盘41和止盘42间隔设置在容纳腔道中,结构骨43的近端穿过基盘41,结构骨43的远端与止盘42固定连接。应理解,一个
机械臂1中可以采用一个连续体构节4、两个连续体构节4或者更多个连续体构节4,其中连续体构节4数越多,机械臂1的弯曲自由度也越多,则机械臂1的运动更加灵活。止盘42与末端执行器和/或摄像装置连接,末端执行器设置成能进行手术操作,摄像装置设置成能获取影像。第一柔性段2的弯曲角度更大,从而保证第一柔性段2在柔性连续体的驱动下能够比第二柔性段3更加灵活的弯曲,进而能够顺利带动末端执行器和/或摄像装置到达目标位置,以便于进行手术操作。
44.上述实施例提供的柔性连续体结构在工作时,由于基盘41固定,当驱动机构驱动推拉结构骨43运动时,结构骨43在近端一侧受拉从而使得对应结构骨43在连续体构节4中的长度增加,另一侧受压从而使得对应结构骨43在连续体构节4中的长度减少,但各结构骨43的总长不变,从而使得结构骨43在远端产生反向弯曲,从而调整末端执行器或者摄像装置的位置。
45.优选地,该泌尿外科手术机械具有三个机械臂1,其中两个机械臂1的远端连接有末端执行器,另一个机械臂1的远端连接有摄像装置,各机械臂1能通过同一个切口进入患者体内且各机械臂1的运动相互不发生干涉。具体地,末端执行器可以为夹钳、电钩、剪刀或者抓钳等,摄像装置可以为内窥镜,用于获取患者体内的视场影像。应当理解,该泌尿外科手术机械的机械臂1还可以为两个或者其他数量,其中一个机械臂1远端连接有摄像装置,其他机械臂1的远端连接末端执行器。
46.在本实施例中,具体地,各机械臂1的远端部分设有彼此能相互运动的所述末端执行器和所述摄像装置。可以理解的是,当机械臂1的远端部分同时设有末端执行器和摄像装置时,末端执行器和摄像装置可相互独立的运动,摄像装置调整好位置和姿态,以捕捉患者体内的视野图像,然后调整末端执行器至目标位置,以使手术操作顺利进行。
47.在本实施例中,如图8和图10所示,第一柔性段2为蛇骨结构,具有较好的弯曲度,便于顺利完成手术所需的工作位置和姿态调整。为便于装配,可选地,如图10和图11所示,第一柔性段2包括依次连接的多个蛇骨关节21,每个蛇骨关节21上均设置有凹槽211和凸起212,一个蛇骨关节21的凸起212能够卡入相邻的另一个蛇骨关节21的凹槽211内。其中,凹槽211和凸起212错位设置。所有的蛇骨关节21形成一个运动节,运动节在柔性连续体结构的结构骨43的驱动下发生弯转,且运动节的运动方向具有一致性。应理解,第一柔性段2还可以为波纹管结构,同样具有较好的弯曲能力。
48.在上述实施例中,优选地,如图8和图12所示,第二柔性段3为管体,第二柔性段3的管壁上沿其轴向延伸方向间隔设置有多个狭缝单元,每个狭缝单元均包括多个弧状狭缝31,弧状狭缝31沿第二柔性段3的周向延伸。具体地,狭缝单元和弧状狭缝31的设置,在兼顾第二柔性段3的结构刚度的情况下,有利于第二柔性段3进行一定程度上的预弯曲。可以保证机械臂1的远端部分在通过戳卡或者鞘套进入人体时,以适应管腔内的弯曲状况产生一定的预弯曲,并且能够在第一柔性段2发生主动弯曲时,产生一定的适应性弯曲,能够同时满足手术器械的刚度需求和柔性需求,降低了手术操作难度,还可以避免了机械臂1的磨损、弯折或者损坏,增加了机械臂1的使用寿命。
49.为使第二柔性段3在弯曲时受力更加均匀,优选地,每个狭缝单元的多个弧状狭缝31依次沿第二柔性段3的轴向延伸方向间隔且错位设置,当第二柔性段3未产生弯曲变形时,多个弧状狭缝31沿第二柔性段3的轴向投影能够形成完整的封闭圆,从而保证第二柔性
段3在各个方向均能够弯曲。可选地,多个弧状狭缝31在第二柔性段3的周向上依次错位一定角度设置,优选地例如错位90
°
设置,应理解,多个弧状狭缝31还可以错位75
°
、60
°
或者其他角度等。为保证弯曲能力的同时兼顾第二柔性段3的结构刚度,优选地,每个弧状狭缝31的弧长均为第二柔性段3的圆周长的一半。应当理解的是,每个弧状狭缝31的弧长还可以为第二柔性段3的圆周长的其他比例,例如四分之三圆周长或者四分之一圆周长等。在本实施例中,每个狭缝单元包括四个弧状狭缝31,同样,每个狭缝单元还可以包括三个、五个等弧状狭缝31,均不脱离本发明的保护范围。
50.本实施例中优选地,如图9所示,连续体构节4还包括间隔设置于基盘41与止盘42之间的多个间隔盘44,结构骨43沿周向依次穿过各间隔盘44。具体地,各结构骨43近端沿周向穿过基盘41,然后沿周向依次穿过多个间隔盘44,远端沿周向设置在止盘42上,多个间隔盘44用于从结构骨43的径向支撑结构骨43,从而使得各结构骨43在弯曲变形的过程中仍然保持平行状态,防止结构骨43在弯曲运动时失稳。
51.优选地,柔性连续体结构包括两个连续体构节4。各连续体构节4的结构骨43的数量为四根。具体地,位于远端的连续体构节4的基盘41与位于近端的连续体构节4的止盘42固定连接,位于远端的连续体构节的结构骨43依次穿过近端的连续体构节4的止盘42、多个间隔盘44和基盘41,然后与驱动机构连接。可以理解的是,设置两个连续体构节4从而保证机械臂1具有多段弯曲能力。由于泌尿外科手术切口一般较小,因此需要使用较小尺寸的机械臂1,因此设置四根结构骨43,既可以保证机械臂1的尺寸较小又能实现较高的自由度配置。
52.本实施例中,结构骨43为超弹性材料制成的弹性细杆或细管。例如,一般可以采用镍钛合金等高强度、高韧性、具有弹性的金属材料制造。
53.本实施例中,如图1所示,多个机械臂1的近端设有关节联动装置101,关节联动装置101具有至少一个关节。具体来说,关节联动装置101在手术过程中保持不动,关节联动装置101可以包括多个旋转关节、位置升降关节和远心不动点位置调节关节组,通过各关节可以实现机械臂1的水平方向、竖直方向以及侧摆位置调整,进而满足机械臂1在术前的位置调整需求,从而便于手术工作的展开。
54.本实施例还提供一种手术机器人,包括上述实施例中的泌尿外科手术机械,该手术机器人可以用于泌尿外科手术操作。实际操作时,通过在一个较小的切口处插入一个具有多通道的鞘套,然后调整机械臂1的位置以将各机械臂1的远端部分通过该鞘套的通道伸入患者体内,从而实现单孔腔镜手术操作,以减少患者切口数量。应理解的是,泌尿外科手术机械的多个机械臂1可以设置在同一手术台车上,也可以设置在不同的手术台车上。
55.如图2、图3和图6所示,在上述实施例中,可选地,该手术机器人还包括:鞘套5和外管6。鞘套5包括彼此固定连接的连接部51和伸入部52,连接部51位于近端用于与手术机器人连接,伸入部52位于远端用于伸入患者体内,连接部51和伸入部52设有彼此贯通的多个沿纵向轴线延伸且径向间隔设置的器械通道53,机械臂1的远端部分贯穿通过器械通道53后进入患者体内。连接部51的多个器械通道53在远端邻近设置,并从远端朝近端彼此远离逐渐,从而避免机械臂之间发生干涉。
56.在一个具体实施例中,如图2至图7所示,具体地,连接部51呈管状,大致为漏斗形,连接部51包括近端的喇叭口和远端的缩口,且喇叭口与缩口之间通过管壁光滑过渡。该鞘
套5还包括三根鞘管54,三根鞘管54形成贯穿通道,即形成器械通道53,鞘管54的远端伸入连接部51内且邻近设置,并与连接部51的缩口贯通,鞘管54的近端从喇叭口伸出连接部51。伸入部52呈管状,且伸入部52的近端与连接部51的远端固定连接,伸入部52的器械通道53与连接部51的缩口贯通。
57.在上述实施例中,如图3和图4所示,鞘管54包括内鞘管段和外鞘管段,内鞘管段位于连接部51内,外鞘管段向近端延伸出连接部51的外部,可以通过设置在外鞘管54上的连接装置将连接部51与手术机器人连接,以实现对鞘套5的固定。优选地,外鞘管段能形变,该形变包括在鞘管54的径向和/或轴向的形变。应该理解,此变形能够补偿因机器控制精度或其他原因导致的机械臂1定位误差,使得机械臂1的远端的末端执行器或内窥镜在存在一定的定位误差的情况下,仍能够较顺利地通过鞘管54内腔进入预定手术部位。
58.在本实施例中,如图3和图5所示,管状的伸入部52还包括沿纵向轴线延伸且彼此间隔设置的第一液体通道55和第二液体通道56,伸入部52的多个器械通道53、第一液体通道55和第二液体通道56均邻近设置。伸入部52的近端设有两个通孔521,第一液体通道55和第二液体通道56分别通过通孔521与伸入部52的近端外部连通。优选地,外管6呈管状,套设在伸入部52外周,两者之间形成间隙,外管6的近端与伸入部52的近端可拆卸的卡合连接,从而便于鞘套5和外套的术前安装和术后清洗。具体地,第一液体通道55和第二液体通道56中的一个为进液通道,另一个为排液通道,优选地,第一液体通道55为进液通道。
59.优选地,外管6的近端设有沿周向延伸的突出部,突出部的径向尺寸大于外管的径向尺寸。外管6的近端设有沿轴向间隔设置进液阀和排液阀(图中未示),优选地,进液阀和排液阀设置在外管6近端的直径相对的两侧,还优选地,进液阀位于更靠近外管6的近端的位置,排液阀位于更靠近外管6的远端的位置,进液阀和排液阀均与外管6的内部连通。外管6在进液阀和排液阀之间设有第一密封件(图中未示),优选地,第一密封件为密封圈,第一密封件的内壁与伸入部52的外壁抵持,第一密封件的外壁与外管6的内壁抵持,使外管6的内壁和伸入部52的外壁之间的间隙在第一密封件轴向两侧彼此密封隔断,由此,进液阀、第一液体通道55和位于第一密封件一侧的突出部内部连通,以形成第一通路,排液阀、第二液体通道56和第一密封件另一侧的间隙连通,以形成第二通路,由于第一密封件的设置从而使第一通路和第二通路分隔开,以使第一通路形成进液通路,便于在手术时对患者体内手术部位组织的清洗,第二通路形成排液通路,便于将手术部位的废液和切割的废弃组织等排出。应理解,第二液体通道56和间隙两者可以选择其中一个,同样可以形成第二通路。例如,外管6和伸入部52之间可以紧密套设,两者之间不形成间隙,此时排液阀和第二液体通道56连通,以形成第二通路。还可以理解的是,外管6和伸入部52之间存在间隙,排液阀和间隙连通,也可以形成第二通路。
60.在本实施例中,优选地,外管6与伸入部52之间在近端设有第二密封件。具体地,第二密封件为密封圈(图中未示),其设置在突出部的近端,以使伸入部52的外壁与外管6的内壁之间的间隙相对于外部密封,从而防止液体泄漏。
61.优选地,第一液体通道55的数量为两个,两个第一液体通道55分别设置在伸入部52的管径内直径相对的两侧,从而对手术部位的组织形成更大范围的清洗,从而避免血污等渍迹影响摄像装置的拍摄视野。
62.如图2至图7所示,进一步地,伸入部52的近端设有卡合部7,卡合部7包括位于近端
的筒基座71和从筒基座71远端轴向向远端延伸的卡合件72,卡合件72的内表面和外管6的近端外周面中的一个设有凸起721,另一个设有弧形凹槽61,凸起721与弧形凹槽61卡合。优选地,卡合件72的内表面设有凸起721。外管6的近端外周面上设有弧形凹槽61,凸起721与弧形凹槽61卡合。具体地,卡合件72为两个,且对称设置,各卡合件72的内表面的凸起721为球状凸起,弧形凹槽61包括近端延伸段和远端延伸段,近端延伸段沿轴线方向从外管6近端边缘向远端延伸并且宽度逐渐减小,且弧形凹槽61位于远端的远端延伸段相对于轴向成角度延伸,且近端延伸段和远端延伸段之间以弧形平滑过渡,以使凸起721能顺利进入远端延伸段内。
63.在本实施例中,伸入部52的近端设有复位机构。复位机构包括设置在筒基座71与伸入部52外周之间的偏压件,偏压件将筒基座71朝向卡合件72的凸起721与弧形凹槽61卡合的方向偏压。应理解,当伸入部52与外管6彼此靠近移动时,伸入部52带动筒基座71和卡合件72移动,从而使卡合件72内表面的凸起721沿弧形凹槽61的近端延伸段槽口边缘向远端移动,偏压件将筒基座71偏压,从而带动卡合件72朝向凸起721与弧形凹槽61卡合的方向移动,使凸起721朝弧形凹槽61的远端延伸段部分移动,从而使伸入部52和外管6合卡。
64.在上述优选实施例中,偏压件为弹簧8,伸入部52外周设有直径相对且径向向外延伸的两段固定杆9,应理解,固定杆9也可以为一根,筒基座71滑动套设在固定杆9上,使得筒基座71相对于固定杆9径向滑动,弹簧8设置在固定杆9的一端与筒基座71之间。具体地,筒基座71呈环状,设置在伸入部52的近端外周,固定杆9沿伸入部52径向方向固定设置在伸入部52的近端,且固定杆9直径相对且径向向外延伸并穿设在筒基座71上,固定杆9的一端部设有止挡部91,以防止筒基座71沿固定杆9径向滑动时滑脱。筒基座71远离止挡部91的一侧固定设有按压部711。具体地,按压部711内部具有空腔,弹簧8位于该空腔内,弹簧8一端与按压部711的内壁抵持,另一端与固定杆9抵持,当伸入部52与外管6彼此靠近移动时,直到弹簧8受力偏压筒基座71,以使卡合件72上的凸起721沿弧形凹槽61的远端延伸段部分移动,从而使伸入部52和外管6合卡。当按压筒基座71上的按压部711,使弹簧8复位带动筒基座71沿固定杆9移动,直至筒基座71的外壁与止挡部91抵持,以使卡合件72上的凸起721从弧形凹槽61的远端延伸段内滑出,从而使伸入部52和外管6可拆卸。应该理解的是,弹簧8还可以设置在筒基座71靠近止挡部91的一侧,弹簧8一端与固定杆9抵持,另一端与筒基座71的内臂抵持。
65.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。