1.本发明涉及包装物流技术领域,具体涉及一种双工位机器人组合装箱生产线。
背景技术:
2.在生产企业和商业企业高速发展的今天,物流已成为企业取得竞争优势的重要因素。好的物流系统可以降低成本,降低风险,提高服务水平,为决策提供科学依据。加强物流信息建设时整个物流系统的关键,利用最先进的物流信息技术为企业发掘出更大的利润空间。特别是在包装企业中,包装设计会影响到所有的物流作业的效率,几乎所有的物流活动的生产都能用包装所组成的货物单元来描述,现代物流信息已经成为包装企业设计中的一项非常重要的环节。
3.包装物流行业离不开产品装箱环节,部分行业或企业仍采用人工装箱,人工装箱费时费力,随着市场人工成本的增加,现阶段部分企业也采用机器人装箱,利用机器人装箱体积小、节拍快的特点来缩减人工成本,但单台机器人的包装能力有限,为了提高整体生产效率,目前常用的两台或多台机器人装箱时多采用串联方式在一条输送带上进行抓取产品装箱,采用这种方式时,两台机器人相互影响干涉,造成效率低,未能充分发挥两台机器人的最快节拍操作,若需满足整线的生产速度,也会通过增加机器人的方式增加成本。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种双工位机器人组合装箱生产线,通过独立控制输送带分别给两台机器人的装箱工位独立供箱,两台机器人的装箱操作相互无干涉和影响,充分发挥组合机器人的生产效率,从而达到降低投入成本的目的。
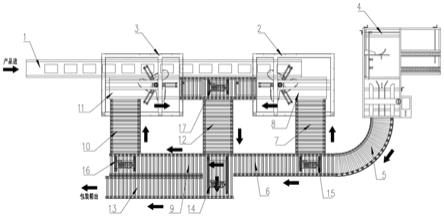
5.为实现上述目的及其他相关目的,本发明提供一种双工位机器人组合装箱生产线,包括产品输送线、第一抓取机器人、第二抓取机器人、箱体输送线和开箱机,所述第一抓取机器人和第二抓取机器人依次设置于产品输送线上,所述开箱机设置于产品输送线的一侧,所述箱体输送线由转弯输送带、第一空箱输送带、第二空箱输送带、第一空箱过渡带、第二空箱过渡带、第一满箱输送带以及第二满箱输送带组成;
6.所述转弯输送线的一端与开箱机的出箱口相连接,其另一端与第一空箱输送带的一端连接,所述第一空箱输送带的另一端与第二空箱输送带的一端相连接,所述第一空箱输送带与第二空箱输送带位于同一水平线上,
7.所述第一空箱输送带远离第二空箱输送带的端部与第一空箱过渡带的一端垂直连接,所述第一空箱过渡带的另一端延伸至第一抓取机器人内且与第一工作带垂直连接,所述第二空箱输送带远离第一空箱输送带的端部与第二空箱过渡带的一端垂直连接,所述第二空箱过渡带的另一端延伸至第二抓取机器人内且与第二工作带垂直连接;
8.所述第一工作带与第二工作带位于同一水平线上且端部相互连接,所述第一满箱输送带的一端垂直连接于第一工作带与第二工作带的衔接端,所述第一满箱输送带的另一
端垂直连接于第一空箱输送带与第二空箱输送带的衔接端,且该衔接端设置有第一顶升移栽机,所述第二满箱输送带的一端通过第一顶升移栽机与第二满箱输送带的端部相连接,所述第二满箱输送带与第二空箱输送带平行设置。
9.优选的,所述第一工作带和第二工作带与第一空箱输送带和第二空箱输送带保持平行。
10.优选的,所述第一空箱过渡带、第二空箱过渡带以及第一满箱输送带相互平行设置。
11.优选的,所述第一空箱输送带与第一空箱过渡带的衔接端设置有第二顶升移栽机。
12.优选的,所述第二空箱输送带与第二空箱过渡带的衔接端设置有第三顶升移栽机。
13.优选的,所述第一工作带与第二工作带的衔接端设置有第四顶升移栽机,所述第一满箱输送带的端部与第四顶升移栽机相连接。
14.与现有技术相比,本发明的有益效果是:本发明在使用时,经过开箱机打开后的空箱先后通过第一空箱过渡带和第二空箱过渡带将空箱分批次分别运输至第一抓取机器人和第二抓取机器人内,当机器人抓取产品输送线上的产品放入空箱,装箱完成后,满箱分批次先后经过第四顶升移栽机、第一满箱输送带、第一顶升移栽机以及第二满箱输送带输送至后续的封箱工位,本发明通过独立控制输送带分别给两台机器人的装箱工位独立供箱,两台机器人的装箱操作相互无干涉和影响,充分发挥组合机器人的生产效率,从而达到降低投入成本的目的。
附图说明
15.下面结合附图与具体实施例对本发明作进一步详细说明。
16.图1为本发明的结构示意图;
17.图2为本发明中第一工作带和第二工作带的侧视图;
18.图3位本发明中第一满箱输送带的侧视图;
19.图4位本发明中第一空箱过渡带的侧视图。
20.其中,附图标记具体说明如下:产品输送线1、第一抓取机器人2、第二抓取机器人3、开箱机4、转弯输送带5、第一空箱输送带6、第一空箱过渡带7、第一工作带8、第二空箱输送带9、第二空箱过渡带10、第二工作带11、第一满箱输送带12、第二满箱输送带13、第一顶升移栽机14、第二顶升移栽机15、第三顶升移栽机16、第四顶升移栽机17。
具体实施方式
21.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易的了解本发明的其他优点及功效。
22.须知,本说明书附图所示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
23.如图1所示,本发明提供一种双工位机器人组合装箱生产线,包括产品输送线1、第一抓取机器人2、第二抓取机器人3、箱体输送线和开箱机4,第一抓取机器人2和第二抓取机器人3依次设置于产品输送线1上,在实际应用时,第一抓取机器人2以及第二抓取机器人3都配套了视觉系统,并且产品输送线1上安装了用以反馈产品位置的传感器,使得第一抓取机器人2和第二抓取机器人3能够对目标产品的位置、姿态进行识别从而精确抓取。开箱机4设置于产品输送线1的一侧,箱体输送线由转弯输送带5、第一空箱输送带6、第二空箱输送带9、第一空箱过渡带7、第二空箱过渡带10、第一满箱输送带12以及第二满箱输送带13组成。
24.转弯输送线的一端与开箱机4的出箱口相连接,其另一端与第一空箱输送带6的一端连接,第一空箱输送带6的另一端与第二空箱输送带9的一端相连接,第一空箱输送带6与第二空箱输送带9位于同一水平线上。
25.如图1和图4所示,第一空箱输送带6远离第二空箱输送带9的端部与第一空箱过渡带7的一端垂直连接,第一空箱过渡带7的另一端延伸至第一抓取机器人2内且与第一工作带8垂直连接,第二空箱输送带9远离第一空箱输送带6的端部与第二空箱过渡带10的一端垂直连接,第二空箱过渡带10的另一端延伸至第二抓取机器人3内且与第二工作带11垂直连接。
26.如图1、图2和图3所示,第一工作带8与第二工作带11位于同一水平线上且端部相互连接,第一满箱输送带12的一端垂直连接于第一工作带8与第二工作带11的衔接端,第一满箱输送带12的另一端垂直连接于第一空箱输送带6与第二空箱输送带9的衔接端,且该衔接端设置有第一顶升移栽机14,第二满箱输送带13的一端通过第一顶升移栽机14与第二满箱输送带13的端部相连接,第二满箱输送带13与第二空箱输送带9平行设置。
27.本实施例中,第一工作带8和第二工作带11与第一空箱输送带6和第二空箱输送带9保持平行。
28.进一步地,第一空箱过渡带7、第二空箱过渡带10以及第一满箱输送带12相互平行设置。
29.进一步地,为了保证空箱能够分批次由第一空箱过渡带7输送至第一抓取机器人2,以及由第一空箱输送带6输送至第二空箱输送带9,第一空箱输送带6与第一空箱过渡带7的衔接端设置有第二顶升移栽机15。
30.进一步地,为了保证第二空箱输送带9上的空箱能够改变输送方向从而进入第二空箱过渡带10,第二空箱输送带9与第二空箱过渡带10的衔接端设置有第三顶升移栽机16。
31.进一步地,为了保证第一工作带8和第二工作带11上的满箱能够改变输送方向进入第一满箱输送带12,第一工作带8与第二工作带11的衔接端设置有第四顶升移栽机17,第一满箱输送带12的端部与第四顶升移栽机17相连接。
32.具体实施步骤:
33.1、产品输送线1将产品依次运输至第一抓取机器人2和第二抓取机器人3的抓取工位;
34.2、开箱机4将箱体打开,并由转弯输送带5将打开后的空箱运输至第一空箱输送带6和第二空箱输送带9;
35.3、通过第二顶升移栽机15将第一空箱输送带6上的空箱运输至第一空箱过渡带7,然后再依次运输至第一工作带8上的抓取放包工位,通过第三顶升移栽机16将第二空箱输送带9上的空箱运输至第二空箱过渡带10,然后再依次运输至第二工作带11上的抓取放包工位;
36.4、第一抓取机器人2和第二抓取机器人3将产品抓取后放入空箱中(在装箱过程中,当第一工作带8和第二动作带上的空箱缓慢进入预设的固定放包工位时,可以控制第一抓取机器人2和第二抓取机器人3提前抓取产品,当进入装箱范围内时,机器人在进行产品放箱操作),装取完成后,满箱按照设定好的指定程序通过第四顶升移栽机17换向后分批进入第一满箱输送带12;
37.5、第一满箱输送带12将满箱输送至端部位置时,控制第一空箱输送带6暂停送箱,然后通过第一顶升移栽机14转向后将满箱输送至第二满箱输送带13上进入后续封箱工位。
38.综上,本发明通过独立控制输送带分别给两台机器人的装箱工位独立供箱,两台机器人的装箱操作相互无干涉和影响,充分发挥组合机器人的生产效率,从而达到降低投入成本的目的。同时,空箱输送与满箱输送配合使用,通过多个顶升移栽机完成箱体的转向,有效节约了独立输送以及两台机器人独立抓取所占的空间,降低了整个系统的占地面积,提高了空间利用率。
39.本发明的产品输送线1、第一抓取机器人2、第二抓取机器人3、开箱机4、转弯输送带5、第一空箱输送带6、第一空箱过渡带7、第一工作带8、第二空箱输送带9、第二空箱过渡带10、第二工作带11、第一满箱输送带12、第二满箱输送带13、第一顶升移栽机14、第二顶升移栽机15、第三顶升移栽机16、第四顶升移栽机17部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本领域技术人员均可通过技术手册得知或通过常规实验方法获知。
40.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。