1.本发明涉及自动化设备领域,尤其涉及一种防坠落的全自动拆垛装置。
背景技术:
2.在工业自动化领域,自动化程度决定了一个企业或工厂的先进生产水平和效率。目前,由于来料包装的不统一和差异性,自动化工厂的原材料拆垛拆包等工作大多由工人完成且需要多人配合,人工拆垛劳动强度大、效率低下、人工成本高,极大地浪费了人力物力。
3.因此,本领域的技术人员致力于开发一种针对自重大、易坠落的堆垛物品的全自动拆垛装置,实现工厂更加灵活自由的线体搭配和更加高效的自动化生产,提高拆垛的工作效率。
技术实现要素:
4.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是如何实现自重大、易坠落堆垛物品的全自动拆垛。
5.为实现上述目的,本发明提供了一种防坠落的全自动拆垛装置,其特征在于,包括提升机、物料托盘和物料箱,其中,所述提升机包括机架、竖直拖链组件和顶升移载装置,所述机架上装有第一电机和调节工作面高度的装置,所述第一电机用于给所述竖直拖链组件提供驱动;所述竖直拖链组件包括拖链、同步带、拖链遮板、行程开关和导轨,所述导轨设置于所述竖直拖链组件的两侧;所述顶升移载装置的底部为滚筒支撑活动件,所述滚筒支撑活动件安装在所述导轨上,所述滚筒支撑活动件由所述竖直拖链组件牵引做竖直方向上的运动,所述滚筒支撑活动件上安装有滚筒线和焊接支撑架,所述焊接支撑架上安装有第二电机、安装板、吸盘组件和拨料组件,所述吸盘组件用于吸住所述物料箱的侧边进行侧拉,所述拨料组件用于插入所述物料箱的间隙进行回推动作。
6.进一步地,所述第一电机安装在所述机架的底部。
7.进一步地,所述机架为固定架,所述机架上还装有前盖板和后盖板。
8.进一步地,所述提升机为左右对称的两台。
9.进一步地,所述第一电机和所述第二电机为伺服电机。
10.进一步地,所述吸盘组件的吸盘数量为8个。
11.进一步地,所述调节设备工作面高度的装置为调节螺栓和固定座,所述调节螺栓安装在所述机架的底面四角,所述固定座安装在所述调节螺栓下方。
12.进一步地,所述竖直拖链组件还包括传感器,所述传感器用于识别物料层高。
13.进一步地,所述拨料组件包括气缸、安装板和拨板,所述拨料组件的前后运动由所述第二电机驱动,所述拨板的上下运动由竖直安装的气缸完成。
14.进一步地,所述拨板的末端为楔形。
15.与现有技术相比,本发明的拆垛装置为左右镜像双提升机机构,可针对每层多个
物料的料垛进行同时拆垛,同时可针对后续线体的高低进行下料高度的调节,直线无缝对接双线体,大大提高了拆垛的工作效率;本发明的拆垛装置拨料机构驱动方式为伺服电机,可同时满足多尺寸的料盘或垛箱的拆垛要求,实现工厂更加灵活自由的线体搭配和更加高效的自动化生产。提升机底面的调节螺栓可以调节提升机工作面的高度,固定座的设计保证稳定的支撑效果,前后盖板保证设备整体的美观性,竖直拖链组件和伺服电机的配合可实现顶升移载装置的上下运动,顶升移载装置内设计为拨板和吸盘配合拆垛,不会发生脱落或滑出的情况,保证设备携带物料运行稳定、可靠。
16.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
17.图1是本发明的一个较佳实施例的一种防坠落的全自动拆垛装置的整体结构示意图;
18.图2是本发明的一个较佳实施例的一种防坠落的全自动拆垛装置的提升机结构示意图;
19.图3是本发明的一个较佳实施例的一种防坠落的全自动拆垛装置的提升机机架及拖链结构示意图;
20.图4是本发明的一个较佳实施例的一种防坠落的全自动拆垛装置的提升机顶升移载装置结构示意图;
21.其中,1-提升机,2-物料托盘,3-物料箱,11-机架,12-顶升移载装置,13-竖直拖链组件,111-调节螺栓,112-固定座,113-前盖板,114-后盖板,121-滚筒支撑活动件,122-顶升移载块,123-滚筒线,124-焊接支撑架,125-安装板,126-齿条,127-滑轨,128-第二伺服电机,129-拨料组件,1210-气缸,1211-拨板,1212-吸盘组件,131-同步带,132-拖链,133-拖链遮板,134-行程开关。
具体实施方式
22.以下参考说明书附图介绍本发明的多个优选实施例,使其技术内容更加清楚和便于理解。本发明可以通过许多不同形式的实施例来得以体现,本发明的保护范围并非仅限于文中提到的实施例。
23.在附图中,结构相同的部件以相同数字标号表示,各处结构或功能相似的组件以相似数字标号表示。附图所示的每一组件的尺寸和厚度是任意示出的,本发明并没有限定每个组件的尺寸和厚度。为了使图示更清晰,附图中有些地方适当夸大了部件的厚度。
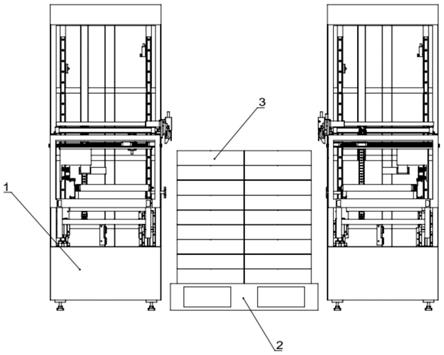
24.如图1所示,本发明提供的一种全自动拆垛装置,包括左右两个提升机1、物料托盘2和物料箱3。如图2和图3所示,提升机包括机架11、顶升移载装置12和竖直拖链组件13,机架11为固定架,固定架底面四角通过焊接块装有调节螺栓111,每个调节螺栓111下装有固定座112,固定座112与地面接触,第一伺服电机安装在机架11底部,给竖直拖链组件13提供驱动,机架11底部和侧面分别装有前盖板113和后盖板114,保证设备外观美观。
25.如图4所示,顶升移载装置12为本发明的核心部件,由底部的滚筒支撑活动件121支撑,滚筒支撑活动件121安装在竖直拖链组件13的两侧导轨上,带动顶升移载装置12上下
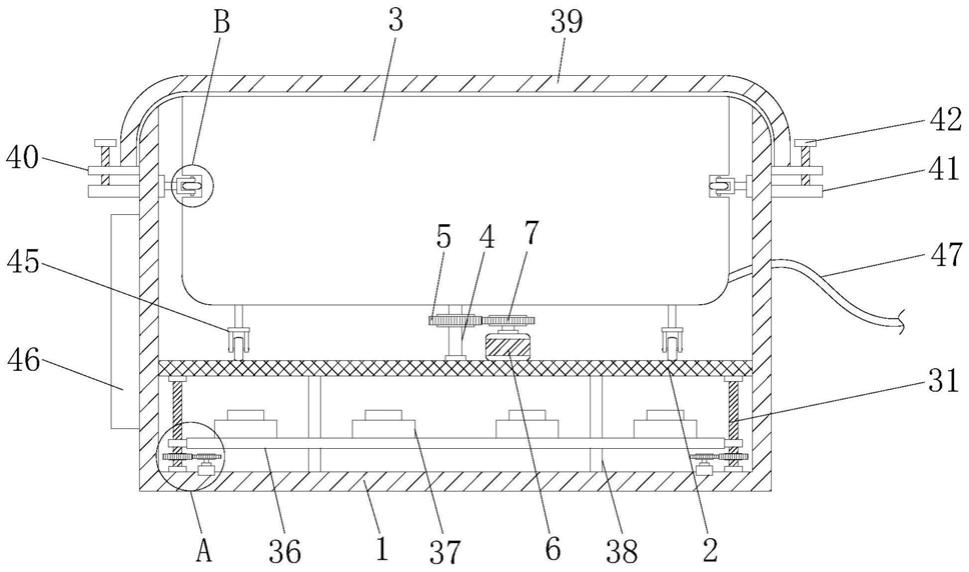
运动,顶升移载块122安装在支撑件上,顶升移载块122上面布置有滚筒线123,焊接支撑架124的四角安装在滚筒支撑活动件121上,焊接支撑架124上安装有第二伺服电机128、安装板125、齿条126、滑轨127、吸盘组件1212和拨料组件129,其中拨料组件129包括气缸1210、安装板125和拨板1211,吸盘组件1212的目的是吸住物料箱3的侧边进行侧拉,拨料组件129插入物料箱3的间隙进行回推动作。吸盘组件1212的动力由气缸提供,拨料组件129前后运动的驱动由第二伺服电机128完成,拨板1211的上下运动由竖直安装的气缸1210完成。
26.竖直拖链组件13安装在机架11上,包括拖链132,同步带131,拖链遮板133,行程开关134和传感器等。
27.本实施例的工作过程:物料托盘2到达工作位后,由光电传感器识别物料箱3的层高,两侧提升机1内的第一伺服电机牵引竖直拖链组件13动作到达指定位置,此时顶升移载装置12整体随之到达指定高度,顶升移载装置12开始动作,安装板125、吸盘组件1212、拨料组件129等向料垛伸出,吸盘组件1212吸住物料箱3侧边,回收一小段距离,使左右料箱中间腾出间隙,此时气缸1210动作,使拨板1211向下运动插入缝隙。接着顶升移载装置12上的第二伺服电机128驱动吸盘组件1212和拨料组件129回归。将物料箱3带至滚筒线123上,竖直拖链组件13运动到指定位置,滚筒线123将物料箱3运输到后续线体上。单步双料箱拆垛完成,实现左右同时拆垛的效果。
28.由于采用上述方案,调节螺栓的设计能起到微调设备高度的效果,固定座能保证设备安装稳定可靠,竖直拖链组件的设计能起到保证拆垛前后工位的高度配合效果,顶升移载装置内的吸盘组件和拨料组件设计能保证料箱下料的路程稳定可靠的效果,避免滑落导致线体损坏的风险。
29.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。