1.本发明涉及一种用于操作具有至少一个牵引电池驱动的牵引马达的传动系的机动车辆的方法。
背景技术:
2.具有这样的传动系的机动车辆可以设计为纯电动车辆(bev)或混合动力车辆(hev)。虽然纯电动车辆只具有马达驱动的电机,从牵引电池为马达驱动的电机提供工作能量,除具有分配牵引电池的电机之外,混合动力车辆具有另一能量转换器,通常是内燃发动机,向该内燃发动机供给由机动车辆携带的燃料。设计为插电式混合动力车辆(phev)的混合动力车辆允许只在电网上使牵引电池充电,然而与其它混合动力车辆相比,不提供例如在用内燃发动机驱动时电机用作发电机运行以便给牵引电池充电。
3.里程焦虑理解为驾驶员担心他的机动车辆的里程可能不足以完成当前的旅行,即驾驶员由于空的牵引电池而被困在远离充电基础设施的路线上。甚至在混合动力车辆不设计为插电式混合动力车辆的情况下也可以出现里程焦虑,即在预定路线可以无排放行驶的情况下并且因此例如由于环境法规而仅电力地无排放行驶。
4.因此需要识别减少里程焦虑的方法。
技术实现要素:
5.本发明的目的是通过用于操作具有至少一个牵引电池驱动的牵引马达的传动系的机动车辆的方法来实现,方法具有以下步骤:
6.用指示为牵引马达提供动力的牵引电池的剩余里程的训练数据来训练自动编码器,
7.读取机动车辆的操作数据,
8.用读入的操作数据加载训练过的自动编码器以生成参考数据集,
9.确定指示读入的操作数据与通过训练过的自动编码器提供的参考数据之间的相似性的值,以及
10.如果指示相似性的值低于预定阈值,则创建输出数据记录。
11.自动编码器是提供原始输入的表示的装置或算法。因此,在训练阶段过程中首先训练具有编码器和解码器的自动编码器以将训练数据映射到参考数据,也就是说将训练数据的副本提供为参考数据。在训练过程中,利用自动编码器检测训练数据和参考数据之间的差异的能力以便取得学习进步。
12.在训练阶段完成之后,在正常操作中使用检测训练数据和参考数据之间的差异的相同能力以记录当前操作数据和参考数据之间的偏差。这样的偏差被认为是异常,该异常被认为指示过低的牵引电池容量或剩余里程。因此,省去检测牵引电池容量或剩余的残余能量的量,但是间接地推断出不足的牵引电池容量或剩余里程。通过这种方式,可以以特别
vehicle,phev)。换句话说,机动车辆4具有包括至少一个牵引电池驱动的牵引马达的传动系8。
28.传动系8包含为机动车辆4中的驱动装置产生动力并且将动力传送至地面的所有部件。
29.数据处理单元6可以是服务器或云计算机或计算机网络。
30.为了在下面描述的系统2的任务,即机动车辆4和数据处理单元6,这或这些具有硬件和/或软件组件。
31.现在还参考图2。
32.数据处理单元6设计用于读取外部数据ed和内部数据id,以将数据临时地存储在存储器10中并且评估存储器10中的数据,如随后更详细地解释。外部数据ed可以是交通数据、天气数据、日历数据、电话连接数据,或充电站数据。内部数据id一方面可以是传感器数据、导航数据、传动系参数、用户数据和地平线数据。
33.交通数据例如可以指示对应于车辆4的当前gps(global position system,全球定位系统)位置的交通拥堵。可以直接从卫星访问或在线访问交通数据。还可以通过v2v(vehicle to vehicle,车辆与车辆)或v2i(vehicle to infrastructure,车辆与基础设施)通信读取交通数据。
34.天气数据可以来自气象站并且指示预期的日间温度。可以直接从卫星访问或在线访问或通过v2v(车辆与车辆)或v2i(车辆与基础设施)通信读入天气数据。
35.日历数据包含来自驾驶员的数字日历的信息。这不包括私人信息,而是驾驶员用于旅行的可用性。例如,机动车辆4由于营业时间而在8小时内未使用,或在接下来的几小时/几天内计划具有一定距离的旅行。没有给出行驶细节,但只有代表到目的地的路线或距离的信息。
36.例如,电话连接数据代表在一天内的多个电话或消息以估计是否有可能的旅行。
37.例如,充电站数据包含来自充电站的供应商的数据。充电站数据包括附近充电站的gps位置和到充电站的距离以及指示充电站的占用和使用的数据。
38.传感器数据来自机动车辆4的车辆侧传感器18,比如gps、摄像机、雷达或激光雷达系统、陀螺仪和相似的传感器。传感器数据可以描述距最近的机动车辆的距离、路线、道路的倾斜度或坡度或车道的数量。
39.导航数据包含来自数字化地图的信息以确定机动车辆4是在高速公路上还是在城市内或是在没有出口的长路线上。为了确定,例如可以附加评估gps信息。
40.例如,传动系参数通过发动机控制单元提供,并且指示在旅行过程中消耗的能量和剩余能量储备,以及比如扭矩和速度这样的相关数据。
41.用户数据与驾驶员和/或他的驾驶配置文件有关。为了这个目的,可以评估行驶时间、旅行长度或甚至旅行周中的天数。
42.地平线数据至少基于导航数据或数字化地图以预测行驶路线和道路状况。地平线数据包括道路坡度、道路类型、道路斜坡、和速度限制。
43.换句话说,外部数据ed可以被认为是不依赖于车辆的数据并且内部数据id可以理解为机动车辆数据或也可以理解为机动车辆运行数据。
44.此外,图2显示数据处理单元6的部件的自动编码器12,该自动编码器12在本示例
性实施例中设计为生成对抗自动编码器(参见对抗性自动编码器,alireza makhzani和jonathon shlens和navdeep jaitly和ian goodfellow以及brendan frey,2016年国际学习代表会议,https://ai.google/research/pubs/pub44904)并且显示用于通过无线数据传输与调制解调器16的双向数据交换的网络层14。特别地,在下面根据图3和4解释自动编码器12的结构和功能。
45.除传动系8之外,在图2中显示机动车辆4的部件:用于无线数据传输的调制解调器16、用于操作牵引电池的电池管理系统18以及用于通知机动车辆4的驾驶员的hmi(human machine interface,人机接口)以及车辆侧传感器22。
46.在操作中,捕获的内部数据id通过调制解调器16无线地传输至数据处理单元6并且由网络层14读入并且接着临时地存储在存储器10中。此外,通过数据处理单元6提供的输出数据记录ad用调制解调器16读入并且接着由电池管理系统18进行评估以生成通知信号hs以通过经由hmi 20的输出来通知车辆4的驾驶员和/或生成用于控制传动系8的控制信号as以便减少能量消耗。hmi 20可以设计用于通过声音和/或光学和/或触觉信号来通知驾驶员。
47.现在还参考图3。
48.显示在训练阶段i过程中,外部数据id和内部数据id用作自动编码器12的训练数据td,训练数据td临时地存储在存储器10中并且用于训练自动编码器12。
49.一方面,当自动编码器12的训练已经完成之后,当前外部数据id和当前内部数据id被看作是操作数据bd,该操作数据bd提供给现在训练过的自动编码器12。训练过的自动编码器12现在提供输出数据记录ad作为输出。
50.现在附加参考图4并且解释自动编码器12的更多细节。
51.自动编码器12具有编码器24、解码器26以及生成对抗网络(gan)28。在本示例性实施例中,自动编码器12是以生成对抗编码器的形式。
52.自动编码器算法设计用于使用编码器24和解码器26来提供原始输入的表示,即训练数据td或操作数据bd。
53.在训练阶段i之后,在训练数据td的情况下,在正常阶段ii中仅将输入的副本、接着操作数据bd提供为输出。如果特定副本与原始数据记录不同,则可以推断出异常。
54.在操作中,解码器26将输出数据记录ad提供为输出变量,输出变量可以是逻辑变量或可能包含逻辑变量,对于足够的牵引电池容量或剩余里程为该逻辑变量分配值逻辑零并且对于不足的牵引电池容量或剩余里程为该逻辑变量分配值逻辑一。
55.例如在训练阶段i过程中,如果解码器26在预定的限度或准确度内不能区分参考数据rd和训练数据td,则逻辑变量被分配逻辑值一。否则,在训练阶段i过程中逻辑变量被分配值逻辑零。
56.为了这个目的—如随后通过图5所解释的—确定指示读入的当前操作数据bd和通过训练过的自动编码器22提供的参考数据rd之间的相似性的值w。如果指示相似性的值w低于预定阈值sw,则生成输出数据记录ad。
57.生成对抗网络28具有第一和第二人工神经网络。第一人工神经网络是以生成器的形式并且第二人工神经网络是以鉴别器的形式。在本示例性实施例中,生成器是通过反卷积神经网络形成的,然而鉴别器是通过卷积神经网络形成的。
58.第一人工神经网络(生成器)创建候选者,同时第二人工神经网络(鉴别器)评估候选者。典型地,生成器将潜在变量从向量映射到所需的结果空间。生成器的目标是学习根据特定分布生成结果。另一方面,训练鉴别器以将生成器的结果与来自真实预定分布的数据相区分。生成器的目标函数接着产生鉴别器不能区分的结果。结果,生成的分布将逐步地符合真实分布。
59.生成对抗网络28用于在操作中通过评估参考数据rd来连续地更新解码器24。
60.在两个子阶段中一起训练生成对抗网络28和自动编码器12。在第一阶段中,自动编码器12更新编码器24和解码器26以使输入数据的重建误差最小化。在第二阶段中,更新生成对抗网络28以将真实的输入数据与生成的输入数据(即由自动编码器12提供的数据)相区分。生成对抗网络28接着更新其生成器以再次刺激生成对抗网络28。
61.在本示例性实施例中,通过无监督学习来训练自动编码器12。然而,与本示例性实施例不同的是,还可以通过监督式学习、半监督学习或强化学习来执行训练。
62.在完成训练阶段i之后,自动编码器12的解码器26形成生成模型,该生成模型将输入数据映射到数据分布。
63.在正常操作ii中,当用操作数据bd加载生成器24时,因此可以检测是否有偏差或异常,该偏差或异常接着被认为指示不足的牵引电池容量或剩余里程。
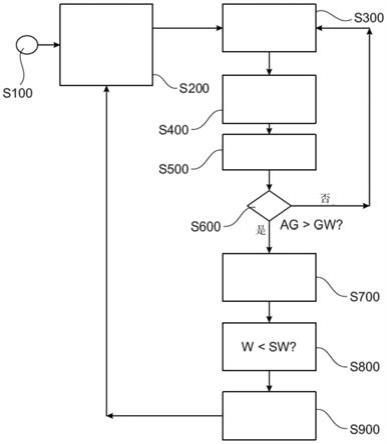
64.现在附加参考图5解释操作系统2的程序。
65.在第一步骤s100中,开始方法。
66.在另一步骤s200中,数据处理单元6读取内部数据id。
67.在另一步骤s300中,读入的内部数据id和外部数据ed临时地存储在存储器10中。
68.在另一步骤s400中,读入的内部数据id和外部数据ed融合和过滤以去除噪声组件。
69.在另一步骤s500中,执行用于训练自动编码器12的训练阶段i。
70.在另一步骤s600中,检查训练是否成功。为了这个目的,将自动编码器12的精度ag与预定极限值gw进行比较。
71.如果精度ag小于或等于极限值gw,则继续训练,即用步骤s200继续程序。
72.如果精度ag超过极限值gw,则用另一步骤s700继续程序。
73.在下一步骤s700中,训练过的自动编码器12用读入的当前操作数据bd进行加载并且接着提供参考数据记录rd。此外,自动编码器12确定指示读入的操作数据bd和通过训练过的自动编码器12提供的参考数据rd之间的相似性的值w,并且如果指示相似性的值w低于预定阈值sw,则生成输出数据记录ad。
74.在另一步骤s800中,输出数据记录ad无线地传输至机动车辆4。
75.在另一步骤s900中,在机动车辆4中评估输出数据记录ad以便生成用于通知机动车辆4的驾驶员的信号hs和/或用于控制传动系8的控制信号as。此外,接着将用下一步骤s200继续程序。
76.与本示例性实施例不同,步骤的顺序还可以是不同的。此外,还可以在同一时间或同时执行多个步骤。此外,与本示例性实施例不同,可以跳过或省略单独的步骤。
77.因此,省掉检测牵引电池容量或剩余的能量残留量,但是间接地推断出不足的牵引电池容量或剩余里程。通过这种方式,可以以特别简单并且同时可靠的方式抵消里程焦
虑。
78.附图标记列表
79.2 系统
80.4 机动车辆
81.6 数据处理单元
82.8 传动系
83.10 存储器
84.12 自动编码器
85.14 网络层
86.16 调制解调器
87.18 电池管理系统
88.20 hmi
89.22 传感器
90.24 编码器
91.26 解码器
92.28 生成对抗网络
93.ag 精度
94.bd 操作数据
95.ed 外部数据
96.gw 极限值
97.id 内部数据
98.sw 阈值
99.rd 参考数据记录
100.td 训练数据
101.w 值
102.i 训练阶段
103.ii 正常操作
104.s100 步骤
105.s200 步骤
106.s300 步骤
107.s400 步骤
108.s500 步骤
109.s600 步骤
110.s700 步骤
111.s800 步骤
112.s900 步骤
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。