1.本公开涉及一种影像处理装置和影像处理系统。
背景技术:
2.已知有以下一种技术:通过安装于车体的摄像机等来对车辆的外部进行拍摄,并将拍摄到的影像用于车辆的后方确认和车外影像记录等各种用途。
3.在用于车辆的后方确认用途的情况下,所拍摄到的影像例如被显示单元实施规定的处理后显示到显示单元所具有的电子镜。
4.在用于车外影像记录用途的情况下,所拍摄到的影像例如被行车记录器单元实施规定的处理后显示到面板式显示器等。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2014-229049号公报
技术实现要素:
8.发明要解决的问题
9.在影像处理装置中,寻求进一步的改善。
10.本公开的目的在于提供一种能够维持显示有影像的状态、并且在期望的时期显示进行了图像处理后的影像的影像处理装置和影像处理系统。
11.用于解决问题的方案
12.本公开所涉及的影像处理装置能够搭载于车辆,所述车辆具备:摄像装置,其对车辆的外部进行拍摄来生成第一影像信号;以及显示装置,其能够显示第一影像和第二影像,所述第一影像是基于第一影像信号生成的影像,所述第二影像是对第一影像信号实施第一处理所生成的影像,所述影像处理装置具备:第一接收部,其从摄像装置接收第一影像信号;影像处理部,其能够从第一接收部接收第一影像信号,该影像处理部对第一影像信号实施第一处理;以及第一发送部,其能够从第一接收部接收第一影像信号,并能够从影像处理部接收用于显示第二影像的信号即第二影像信号,该第一发送部能够将第一影像信号和第二影像信号发送到显示装置。
附图说明
13.图1是示出具备第一实施方式所涉及的行车记录器单元的车辆的一例的示意图。
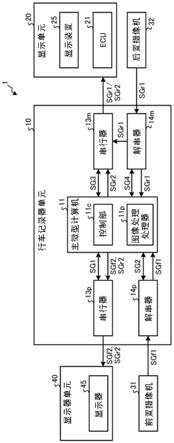
14.图2是示出第一实施方式所涉及的影像处理系统的结构的一例的框图。
15.图3是示出第一实施方式所涉及的行车记录器单元所进行的处理的过程的一例的流程图。
16.图4是示出第二实施方式所涉及的影像处理系统的结构的一例的框图。
17.图5是示出第二实施方式所涉及的行车记录器单元所进行的处理的过程的一例的
流程图。
18.图6是示出第三实施方式所涉及的影像处理系统的结构的一例的框图。
19.图7是示出第三实施方式所涉及的行车记录器单元所进行的处理的过程的一例的流程图。
20.图8是示出第四实施方式所涉及的影像处理系统的结构的一例的框图。
21.图9是示出第四实施方式所涉及的行车记录器单元所进行的处理的过程的一例的流程图。
22.图10是示出第五实施方式所涉及的影像处理系统的结构的一例的框图。
23.图11是示出第五实施方式所涉及的影像处理系统所进行的处理的过程的一例的流程图。
24.图12是示出第六实施方式所涉及的影像处理系统的结构的一例的框图。
25.图13是示出第六实施方式所涉及的行车记录器单元所进行的处理的过程的一例的流程图。
具体实施方式
26.本公开的一个方式的概要如下所述。
27.[项目1]
[0028]
一种影像处理装置,能够搭载于车辆,所述车辆具备:摄像装置,其对所述车辆的外部进行拍摄来生成第一影像信号;以及第一显示装置,其能够显示第一影像和第二影像,所述第一影像是基于所述第一影像信号生成的影像,所述第二影像是对所述第一影像信号实施第一处理所生成的影像,所述影像处理装置具备:
[0029]
第一接收部,其从所述摄像装置接收所述第一影像信号;
[0030]
影像处理部,其能够从所述第一接收部接收所述第一影像信号,该影像处理部对所述第一影像信号实施所述第一处理;以及
[0031]
第一发送部,其能够从所述第一接收部接收所述第一影像信号,并能够从所述影像处理部接收用于显示所述第二影像的信号即第二影像信号,该第一发送部能够将所述第一影像信号和所述第二影像信号发送到所述第一显示装置。
[0032]
[项目2]
[0033]
根据项目1所记载的影像处理装置,其中,
[0034]
能够在使所述第一显示装置显示所述第一影像的第一模式与使所述第一显示装置显示所述第二影像的第二模式之间进行切换。
[0035]
[项目3]
[0036]
根据项目2所记载的影像处理装置,其中,
[0037]
在所述影像处理部变为能够实施所述第一处理的时刻即第一时刻之后,所述影像处理装置从所述第一模式切换为所述第二模式。
[0038]
[项目4]
[0039]
根据项目3所记载的影像处理装置,其中,
[0040]
在所述车辆处于停车中的、在所述第一时刻之后的第二时刻,所述影像处理装置从所述第一模式切换为所述第二模式。
[0041]
[项目5]
[0042]
根据项目2至项目4中的任一项所记载的影像处理装置,其中,
[0043]
在从所述第一模式向所述第二模式切换时,使所述第一显示装置显示黑屏。
[0044]
[项目6]
[0045]
根据项目1至项目5中的任一项所记载的影像处理装置,还具备:
[0046]
第一控制部,其控制所述第一接收部和所述第一发送部;以及
[0047]
具备所述影像处理部的与所述第一控制部不同的第二控制部。
[0048]
[项目7]
[0049]
根据项目6所记载的影像处理装置,其中,
[0050]
所述第一控制部与所述第二控制部彼此独立地工作。
[0051]
[项目8]
[0052]
根据项目6或项目7所记载的影像处理装置,其中,
[0053]
在检测到所述第二控制部故障的情况下,所述影像处理装置从使所述第一显示装置显示所述第二影像的第二模式切换为使所述第一显示装置显示所述第一影像的第一模式。
[0054]
[项目9]
[0055]
根据项目2至项目5中的任一项所记载的影像处理装置,还具备:
[0056]
第一控制部,其控制所述第一接收部和所述第一发送部;以及
[0057]
第二控制部,其控制所述影像处理部和所述第一发送部,
[0058]
在所述第一模式下,所述第一控制部使所述第一发送部向所述第一显示装置发送所述第一影像信号,
[0059]
在所述第二模式下,所述第二控制部使所述第一发送部向所述第一显示装置发送所述第二影像信号。
[0060]
[项目10]
[0061]
根据项目9所记载的影像处理装置,其中,
[0062]
所述第一控制部与所述第二控制部彼此独立地工作。
[0063]
[项目11]
[0064]
根据项目9所记载的影像处理装置,其中,
[0065]
在检测到所述第二控制部故障的情况下,所述影像处理装置从所述第二模式切换为所述第一模式。
[0066]
[项目12]
[0067]
根据项目1至项目11中的任一项所记载的影像处理装置,其中,
[0068]
所述第一处理包含以下处理:基于所述第一影像信号来探测在所述车辆的周围存在的物体,并对所述第一影像信号附加用于强调所述物体的强调信号。
[0069]
[项目13]
[0070]
根据项目1至项目12中的任一项所记载的影像处理装置,还具备:
[0071]
第二显示装置,其能够显示第三影像,所述第三影像是对所述第一影像信号实施第二处理所生成的影像;以及
[0072]
第二发送部,其将用于显示所述第三影像的信号即第三影像信号发送到所述第二
显示装置。
[0073]
[项目14]
[0074]
一种影像处理系统,能够搭载于车辆,所述影像处理系统具备:摄像装置,其对所述车辆的外部进行拍摄来生成第一影像信号;第一显示装置,其能够显示第一影像和第二影像,所述第一影像是对所述第一影像信号实施第一处理所生成的影像,所述第二影像是对所述第一影像信号实施第二处理所生成的影像;以及影像处理装置,其对所述第一影像信号实施所述第二处理,
[0075]
所述影像处理装置具备:
[0076]
第一接收部,其从所述摄像装置接收所述第一影像信号;
[0077]
影像处理部,其能够从所述第一接收部接收所述第一影像信号,该影像处理部对所述第一影像信号实施所述第二处理;以及
[0078]
第一发送部,其能够从所述第一接收部接收所述第一影像信号,并能够从所述影像处理部接收用于显示所述第二影像的信号即第二影像信号,该第一发送部能够将所述第一影像信号和所述第二影像信号发送到所述第一显示装置。
[0079]
[项目15]
[0080]
根据项目14所记载的影像处理系统,其中,
[0081]
所述影像处理装置能够在使所述第一显示装置显示所述第一影像的第一模式与使所述第一显示装置显示所述第二影像的第二模式之间进行切换。
[0082]
[项目16]
[0083]
根据项目14或项目15所记载的影像处理系统,其中,
[0084]
所述影像处理装置还具备:
[0085]
第一控制部,其控制所述第一接收部和所述第一发送部;以及
[0086]
第二控制部,其控制所述影像处理部。
[0087]
[项目17]
[0088]
根据项目16所记载的影像处理系统,其中,
[0089]
所述第一控制部与所述第二控制部彼此独立地工作。
[0090]
[项目18]
[0091]
根据项目15所记载的影像处理系统,其中,
[0092]
所述影像处理装置还具备:
[0093]
第一控制部,其控制所述第一接收部和所述第一发送部;以及
[0094]
第二控制部,其控制所述影像处理部和所述第一发送部,
[0095]
在所述第一模式下,所述第一控制部使所述第一发送部向所述第一显示装置发送所述第一影像信号,
[0096]
在所述第二模式下,所述第二控制部使所述第一发送部向所述第一显示装置发送所述第二影像信号。
[0097]
[项目19]
[0098]
根据项目18所记载的影像处理系统,其中,
[0099]
在检测到所述第二控制部故障的情况下,所述影像处理系统从所述第二模式切换为所述第一模式。
[0100]
[项目20]
[0101]
一种影像处理装置,能够搭载于车辆,所述车辆具备:摄像装置,其对所述车辆的外部进行拍摄来生成第一影像信号;以及显示装置,其能够显示第一影像和第二影像,所述第一影像是基于所述第一影像信号生成的影像,所述第二影像是基于对所述第一影像信号附加第一信号而得到的第二影像信号生成的影像,所述影像处理装置具备:
[0102]
第一接收部,其从所述摄像装置接收所述第一影像信号;
[0103]
影像处理部,其能够从所述第一接收部接收所述第一影像信号,该影像处理部基于所述第一影像信号来生成所述第一信号;以及
[0104]
第一发送部,其能够从所述第一接收部接收所述第一影像信号,并能够从所述影像处理部接收所述第一信号,该第一发送部能够将所述第一影像信号和所述第一信号发送到所述显示装置。
[0105]
[项目21]
[0106]
根据项目20所记载的影像处理装置,其中,
[0107]
所述显示装置具备影像信号生成部,该影像信号生成部用于对所述第一影像信号附加所述第一信号来生成所述第二影像信号。
[0108]
[项目22]
[0109]
根据项目20或项目21所记载的影像处理装置,其中,
[0110]
能够在使所述显示装置显示所述第一影像的第一模式与使所述显示装置显示所述第二影像的第二模式之间进行切换。
[0111]
[项目23]
[0112]
根据项目20至项目22中的任一项所记载的影像处理装置,还具备:
[0113]
第一控制部,其控制所述第一接收部和所述第一发送部;以及
[0114]
具备所述影像处理部的与所述第一控制部不同的第二控制部。
[0115]
[项目24]
[0116]
根据项目22所记载的影像处理装置,还具备:
[0117]
第一控制部,其控制所述第一接收部和所述第一发送部;以及
[0118]
第二控制部,其控制所述影像处理部和所述第一发送部,
[0119]
在所述第一模式下,所述第一控制部使所述第一发送部向所述显示装置发送所述第一影像信号,
[0120]
在所述第二模式下,所述第二控制部使所述第一发送部向所述显示装置发送所述第一影像信号和所述第一信号。
[0121]
[项目25]
[0122]
根据项目23或项目24所记载的影像处理装置,其中,
[0123]
所述第一控制部与所述第二控制部彼此独立地工作。
[0124]
[项目26]
[0125]
根据项目20至项目25中的任一项所记载的影像处理装置,其中,
[0126]
所述影像处理部基于所述第一影像信号来探测在所述车辆的周围存在的物体,并生成用于强调所述物体的强调信号来作为所述第一信号。
[0127]
[项目27]
[0128]
一种影像处理系统,能够搭载于车辆,该影像处理系统具备:摄像装置,其对所述车辆的外部进行拍摄来生成第一影像信号;第一显示装置,其能够显示第一影像和第二影像,所述第一影像是基于所述第一影像信号生成的影像,所述第二影像是基于对所述第一影像信号附加第一信号而得到的第二影像信号生成的影像;以及影像处理装置,其生成所述第一信号,
[0129]
其中,所述影像处理装置具备:
[0130]
第一接收部,其从所述摄像装置接收所述第一影像信号;
[0131]
影像处理部,其能够从所述第一接收部接收所述第一影像信号,该影像处理部基于所述第一影像信号来生成所述第一信号;以及
[0132]
第一发送部,其能够从所述第一接收部接收所述第一影像信号,并能够从所述影像处理部接收所述第一信号,该第一发送部能够将所述第一影像信号和所述第一信号发送到所述第一显示装置。
[0133]
[项目28]
[0134]
根据项目27所记载的影像处理系统,其中,
[0135]
所述第一显示装置具备影像信号生成部,该影像信号生成部用于对所述第一影像信号附加所述第一信号来生成所述第二影像信号。
[0136]
[项目29]
[0137]
根据项目27或项目28所记载的影像处理系统,其中,
[0138]
所述影像处理装置能够在使所述第一显示装置显示所述第一影像的第一模式与使所述第一显示装置显示所述第二影像的第二模式之间进行切换。
[0139]
[项目30]
[0140]
根据项目27至项目29中的任一项所记载的影像处理系统,其中,
[0141]
所述影像处理装置还具备:
[0142]
第一控制部,其控制所述第一接收部和所述第一发送部;以及
[0143]
第二控制部,其控制所述影像处理部。
[0144]
[项目31]
[0145]
根据项目29所记载的影像处理系统,其中,
[0146]
所述影像处理装置还具备:
[0147]
第一控制部,其控制所述第一接收部和所述第一发送部;以及
[0148]
第二控制部,其控制所述影像处理部和所述第一发送部,
[0149]
在所述第一模式下,所述第一控制部使所述第一发送部向所述第一显示装置发送所述第一影像信号,
[0150]
在所述第二模式下,所述第二控制部使所述第一发送部向所述第一显示装置发送所述第一影像信号和所述第一信号。
[0151]
[项目32]
[0152]
根据项目30或项目31所记载的影像处理系统,其中,
[0153]
所述第一控制部与所述第二控制部彼此独立地工作。
[0154]
[项目33]
[0155]
根据项目27至项目32中的任一项所记载的影像处理系统,其中,
[0156]
所述影像处理部基于所述第一影像信号来探测在所述车辆的周围存在的物体,并生成用于强调所述物体的强调信号来作为所述第一信号。
[0157]
下面,参照附图来说明本公开所涉及的影像处理装置和影像处理系统的实施方式。
[0158]
[第一实施方式]
[0159]
(车辆的结构例)
[0160]
图1是示出具备第一实施方式所涉及的行车记录器单元10的车辆5的一例的示意图。如图1所示,第一实施方式的车辆5例如具备行车记录器单元10、后置摄像机32以及显示装置25。车辆5也可以具备前置摄像机31和显示器45。在下面,说明车辆5具备前置摄像机31和显示器45的例子。
[0161]
前置摄像机31例如配置于车辆5的前挡风玻璃。前置摄像机31对车辆5的外部进行拍摄,来生成第四影像信号。前置摄像机31例如对车辆5的前方进行拍摄。第四影像信号例如包含前方影像的信息。前方影像是指由前置摄像机31拍摄车辆5的前方而得到的影像。
[0162]
后置摄像机32例如配置于车辆5的后挡风玻璃。后置摄像机32对车辆5的外部进行拍摄,来生成第一影像信号。后置摄像机32例如对车辆5的后方进行拍摄。第一影像信号例如包含后方影像的信息。后方影像是指由后置摄像机32拍摄车辆5的后方而得到的影像。后置摄像机32是摄像装置的一例。
[0163]
行车记录器单元10例如收纳于车辆5的中控台盒内。行车记录器单元10对从后置摄像机32接收到的第一影像信号实施第一处理。第一处理例如包含以下处理:基于第一影像信号来探测在车辆5的周围存在的物体,并对第一影像信号附加用于强调物体的强调信号。例如行车记录器单元10是影像处理装置的一例。行车记录器单元10也可以对从后置摄像机32接收到的第一影像信号实施第二处理。行车记录器单元10也可以对从前置摄像机31接收到的第四影像信号实施第三处理。第二处理和第三处理例如是以适于车外影像记录和显示器45中的显示的方式进行的、对色彩和对比度的调整。行车记录器单元10也可以对从后置摄像机32接收到的第一影像信号实施第二处理,来生成用于显示第三影像的信号即第三影像信号。对第三影像在后面进行描述。
[0164]
显示装置25显示车辆5的后方。显示装置25例如显示车辆5的后方影像。显示装置25例如是液晶显示器。显示装置25例如也可以是用于确认车辆5的后方的像镜一样的镜型显示装置。显示装置25例如是电子镜。显示装置25例如显示由与显示装置25一体形成的电子控制单元(ecu:electronic control unit)实施了规定的处理而得到的后方影像。显示装置25是显示装置的一例。显示装置25也是第一显示装置的一例。电子镜是镜型显示装置的一例。在本实施方式中,显示装置25是呈车内后视镜形状的电子镜。显示装置25能够显示第一影像,该第一影像是基于第一影像信号生成的影像。第一影像例如是后方影像。另外,显示装置25能够显示第二影像,该第二影像是对第一影像信号实施第一处理所生成的影像。第二影像例如是对第一影像实施了图像处理而得到的影像。更具体地说,第二影像例如是对第一影像进行了物体的强调显示而得到的影像。
[0165]
此外,在图1中,显示装置25被记载为呈车内后视镜形状的电子镜,但是,在显示装置25是电子镜的情况下,显示装置25也可以是后方确认用的其它形状的电子镜。显示装置25例如也可以是具有后视镜或翼子板后视镜形状的电子镜。
[0166]
显示器45例如是液晶显示器。显示器45例如也可以是嵌入仪表盘等中的面板型的液晶显示器。也可以是,显示器45能够显示第三影像,该第三影像是对第一影像信号实施第二处理所生成的影像。第三影像例如是对第一影像实施了图像处理而得到的影像。更具体地说,第三影像例如是对第一影像进行了物体的强调显示以及对色彩和对比度的调整而得到的影像。也可以是,显示器45能够显示第四影像,该第四影像是对第四影像信号实施第三处理所生成的影像。第四影像例如是对前方影像实施了图像处理而得到的影像。更具体地说,第四影像例如是对前方影像进行了物体的强调显示以及对色彩和对比度的调整而得到的影像。显示器45是第二显示装置的一例。
[0167]
显示器45也可以显示设置于车辆5的侧面或车内等的未图示的其它摄像机的影像。另外,显示器45也可以显示将包括前置摄像机31和后置摄像机32在内的对车外进行拍摄的多个摄像机的影像进行合成而得到的影像。将多个摄像机的影像进行合成而得到的影像例如是指全方位鸟瞰影像。
[0168]
此外,以上说明了的行车记录器单元10、后置摄像机32以及显示装置25是后述的影像处理系统的一部分。前置摄像机31和显示器45也可以是后述的影像处理系统的一部分。
[0169]
(影像处理系统的结构例)
[0170]
图2是示出第一实施方式所涉及的影像处理系统1的结构的一例的框图。如图2所示,第一实施方式的影像处理系统1具备行车记录器单元10、显示单元20以及后置摄像机32。第一实施方式的影像处理系统1例如构成为能够搭载于上述的车辆5。影像处理系统1也可以包括前置摄像机31和显示器单元40。下面,说明影像处理系统1包括前置摄像机31和显示器单元40的例子。
[0171]
行车记录器单元10具备主微型计算机11、串行器13m以及解串器14m。行车记录器单元10也可以具备串行器13p和解串器14p。下面,说明行车记录器单元10具备串行器13p和解串器14p的例子。
[0172]
主微型计算机11例如是具备cpu(central processing unit:中央处理单元)、rom(read only memory:只读存储器)以及ram(random access memory:随机存取存储器)的计算机。主微型计算机11例如构成为具备图像处理处理器11p和控制部11c的soc(system on chip:片上系统)。主微型计算机11是第二控制部的一例。图像处理处理器11p是影像处理部的一例。控制部11c对图像处理处理器11p进行控制。
[0173]
主微型计算机11能够通过向串行器13m发送控制信号sg3来控制串行器13m。另外,主微型计算机11能够通过向解串器14m发送控制信号sg4来控制解串器14m。主微型计算机11通过向串行器13p发送控制信号sg1来控制串行器13p。另外,主微型计算机11通过向解串器14p发送控制信号sg2来控制解串器14p。具体地说,控制部11c通过发送各个控制信号来控制串行器13m、解串器14m、串行器13p以及解串器14p。
[0174]
当从后置摄像机32发送来影像信号sgr1作为第一影像信号时,主微型计算机11向解串器14m发送控制信号sg4,由此使解串器14m接收来自后置摄像机32的影像信号sgr1。解串器14m所接收的影像信号sgr1例如是串行化后的影像信号。
[0175]
解串器14m当接收到来自主微型计算机11的控制信号sg4时,接收从后置摄像机32发送的影像信号sgr1。解串器14m将影像信号sgr1发送到主微型计算机11和串行器13m。解
串器14m是第一接收部的一例。解串器14m也可以将接收到的影像信号sgr1转换为并行数据后进行发送。
[0176]
当从前置摄像机31发送来影像信号sgf1作为第四影像信号时,主微型计算机11向解串器14p发送控制信号sg2,由此使解串器14p接收来自前置摄像机31的影像信号sgf1。解串器14p所接收的影像信号sgf1例如是串行化后的影像信号。
[0177]
解串器14p当接收到来自主微型计算机11的控制信号sg2时,接收从前置摄像机31发送的影像信号sgf1。解串器14p将影像信号sgf1发送到主微型计算机11。解串器14p是第二接收部的一例。解串器14p也可以将接收到的影像信号sgf1转换为并行数据后进行发送。
[0178]
主微型计算机11从解串器14m接收由后置摄像机32生成的第一影像信号来作为影像信号sgr1。具体地说,图像处理处理器11p从解串器14m接收影像信号sgr1。图像处理处理器11p对影像信号sgr1实施第一处理,来生成影像信号sgr2。影像信号sgr2是作为用于显示第二影像的信号的第二影像信号的一例。图像处理处理器11p将影像信号sgr2发送到串行器13m。换言之,主微型计算机11将影像信号sgr2发送到串行器13m。主微型计算机11也可以将影像信号sgr2转换为并行数据后发送到串行器13m。
[0179]
主微型计算机11从解串器14p接收由前置摄像机31生成的第四影像信号来作为影像信号sgf1。具体地说,图像处理处理器11p从解串器14p接收影像信号sgf1。图像处理处理器11p对影像信号sgf1实施第二处理,来生成影像信号sgf2。第二处理例如是以适于车外影像记录和显示器45中的显示的方式进行的、对色彩和对比度的调整。图像处理处理器11p将影像信号sgf2和影像信号sgr2发送到串行器13p。换言之,主微型计算机11将影像信号sgf2和影像信号sgr2发送到串行器13p。主微型计算机11也可以将影像信号sgf2和影像信号sgr2转换为并行数据后发送到串行器13p。
[0180]
在此,具体说明第一处理。第一处理包含对第一影像信号附加信号的处理。第一处理例如包含物体探测处理。物体探测处理是指以下处理:基于第一影像信号来探测在车辆5的周围存在的物体,并对第一影像信号附加用于强调物体的强调信号。下面,具体说明第一处理包含物体探测处理的例子。第一处理也可以包含将因恶劣天气引起的图像中的噪声降低的处理。具体地说,第一处理也可以包含去雨处理、去雪处理或者去雾处理。例如,也可以是,在主微型计算机11检测到根据第一影像信号生成的图像中存在雨、雪或者雾时,图像处理处理器11p进行通过调整第一影像信号的对比度来使雨、雪或者雾不易看到的处理来作为第一处理。或者,第一处理也可以包含描绘路面标识、道路标识的处理。路面标识包括道路标识和划分线。例如,也可以是,主微型计算机11在判断为根据第一影像信号生成的图像中的道路标识的一部分隐藏起来的情况下,进行对第一影像信号附加用于描绘道路标识的信号的处理来作为第一处理。
[0181]
图像处理处理器11p基于影像信号sgr1进行图像处理,来探测所拍摄到的后方影像中有无存在物体,在存在物体的情况下探测该物体的种类和从车辆5到该物体的距离。然后,图像处理处理器11p对影像信号sgr1附加用于对探测到的物体中的、离车辆5的距离为规定值以下的物体进行强调显示那样的强调信号。规定值例如为20m。规定值也可以根据车辆5正在行驶的道路的种类而被设定为不同的值。例如,也可以是,在车辆5正在一般道路中行驶的情况下,规定值被设定为20m,在车辆5正在高速道路中行驶的情况下,规定值被设定为50m。图像处理处理器11p也可以仅在探测到的物体为规定种类的物体时,对探测到的物
体进行强调显示。例如,也可以仅在探测到的物体为汽车、两轮车或步行者时进行强调显示。图像处理处理器11p例如也可以通过用框线围住探测到的物体来进行强调显示。强调显示的方法不限于此。第一处理也可以包含对色彩和对比度的调整。
[0182]
串行器13m当接收到来自主微型计算机11的控制信号sg3时,将从解串器14m接收到的影像信号sgr1和从主微型计算机11接收到的影像信号sgr2中的任一方发送到显示单元20。例如,也可以是,串行器13m在从解串器14m接收到被转换为并行数据后的影像信号sgr1时,将影像信号sgr1转换为串行数据后进行发送。例如,也可以是,串行器13m在从主微型计算机11接收到被转换为并行数据后的影像信号sgr2时,将影像信号sgr2转换为串行数据后进行发送。串行器13m是第一发送部的一例。
[0183]
影像信号sgr2和影像信号sgf2还作为记录影像被保存于主微型计算机11。影像信号sgr2和影像信号sgf2例如被保存于主微型计算机11的ram。
[0184]
也可以是,行车记录器单元10能够在使显示装置25显示第一影像的第一模式与使显示装置25显示第二影像的第二模式之间进行切换。在行车记录器单元10以第一模式进行动作的情况下,主微型计算机11通过发送控制信号sg3,来将串行器13m控制为将影像信号sgr1发送到显示单元20。在行车记录器单元10以第二模式进行动作的情况下,主微型计算机11通过发送控制信号sg3,来将串行器13m控制为将影像信号sgr2发送到显示单元20。
[0185]
主微型计算机11通过发送控制信号sg1,来将串行器13p控制为将影像信号sgr2和影像信号sgf2发送到显示器单元40。
[0186]
串行器13p当接收到来自主微型计算机11的控制信号sg1时,将从主微型计算机11接收到的影像信号sgr2和从主微型计算机11接收到的影像信号sgf2发送到显示器单元40。例如,也可以是,串行器13p在从主微型计算机11接收到被转换为并行数据后的影像信号sgr2时,将影像信号sgr2转换为串行数据后进行发送。例如,也可以是,串行器13p在从主微型计算机11接收到被转换为并行数据后的影像信号sgf2时,将影像信号sgf2转换为串行数据后进行发送。串行器13p是第二发送部的一例。
[0187]
此外,从主微型计算机11向串行器13p发送控制信号sg1、从主微型计算机11向解串器14p发送控制信号sg2、从主微型计算机11向串行器13m发送控制信号sg3、以及从主微型计算机11向解串器14m发送控制信号sg4例如是通过i2c(inter-integrated circuit:内置集成电路)形式来进行的。
[0188]
另外,从解串器14p向主微型计算机11发送影像信号sgf1、从主微型计算机11向串行器13p发送影像信号sgf2、从解串器14m向主微型计算机11发送影像信号sgr1、以及从主微型计算机11向串行器13m发送影像信号sgr2例如是通过mipi(mobile industry processor interface:移动产业处理器接口)形式来进行的。
[0189]
另外,从后置摄像机32向解串器14m发送影像信号sgr1、从串行器13m向显示单元20发送影像信号sgr1和影像信号sgr2、从前置摄像机31向解串器14p发送影像信号sgf1、从串行器13p向显示器单元40发送影像信号sgr2和影像信号sgf2例如是通过fpd-link iii(flat panel display-link iii:平板显示链接iii)形式来进行的。
[0190]
这些影像传输既可以通过有线通信来进行,也可以通过无线通信来进行。例如,也可以通过使用同轴线缆的有线通信来进行影像传输。例如,也可以通过使用wi-fi(注册商标)的无线通信来进行影像传输。
[0191]
显示器单元40具备显示器45。显示器单元40例如构成为车载信息娱乐(ivi:in-vehicle infotainment)系统的一部分。
[0192]
显示器单元40将接收到的影像信号sgr2和影像信号sgf2发送到显示器45。显示器45能够基于接收到的影像信号sgr2和影像信号sgf2来显示第三影像和第四影像。第三影像和第四影像例如能够用于停车辅助中的车外状况显示、停车位显示、以及停车路线显示等用途。
[0193]
显示单元20具备显示装置25。显示单元20也可以具备ecu(electronic control unit:电子控制单元)21。下面,说明显示单元20具备ecu 21的例子。
[0194]
显示单元20将接收到的影像信号sgr1或者影像信号sgr2发送到ecu 21。ecu 21对影像信号sgr1或者影像信号sgr2实施影像处理。影像处理例如是以适于显示装置25中的显示的方式进行的、对色彩和对比度的调整。
[0195]
由ecu 21实施了影像处理后的影像信号sgr1或者影像信号sgr2被传送到显示装置25。显示装置25显示第一影像或者第二影像,该第一影像是基于影像信号sgr1生成的影像,该第二影像是基于影像信号sgr2生成的影像。第一影像和第二影像例如用于车辆5的后方确认。
[0196]
此外,也可以是,显示单元20能够从后置摄像机32直接接收影像信号sgr1。
[0197]
(行车记录器单元的处理例)
[0198]
接着,使用图3来说明第一实施方式的行车记录器单元10所进行的处理的例子。图3是示出第一实施方式所涉及的行车记录器单元10所进行的处理的过程的一例的流程图。在此,仅说明由后置摄像机32生成的影像信号的处理。
[0199]
如图3所示,当影像信号sgr1从后置摄像机32被发送到行车记录器单元10时(步骤s101),主微型计算机11将影像信号sgr1的接收指令作为控制信号sg4发送到解串器14m(步骤s102)。
[0200]
解串器14m当接收到控制信号sg4时,从后置摄像机32接收影像信号sgr1(步骤s103)。解串器14m将影像信号sgr1解串化来转换为并行数据(步骤s104)。解串器14m将转换为并行数据后的影像信号sgr1发送到主微型计算机11和串行器13m(步骤s105)。
[0201]
在此,根据主微型计算机11是否能够实施第一处理,其后的处理发生分支(步骤s106)。主微型计算机11能够实施第一处理的状态是指图像处理处理器11p已启动的状态。例如当从主微型计算机11启动起经过规定的时间时,图像处理处理器11p进行启动。此外,即使在主微型计算机11不能实施第一处理的情况下,只要能够进行串行器13m、解串器14m、串行器13p以及解串器14p的控制,则也能够执行步骤s102和后述的步骤s107。
[0202]
在主微型计算机11不能实施第一处理的情况下(步骤s106:“否”),在主微型计算机11中进行处理以使行车记录器单元10以第一模式进行动作。具体如以下那样。主微型计算机11将影像信号sgr1的发送指令作为控制信号sg3发送到串行器13m(步骤s107)。
[0203]
串行器13m当接收到控制信号sg3时,将从解串器14m接收到的影像信号sgr1串行化(步骤s108)。串行器13m将串行化后的影像信号sgr1发送到显示单元20(步骤s109)。
[0204]
在主微型计算机11能够实施第一处理的情况下(步骤s106:“是”),在主微型计算机11中进行处理以使行车记录器单元10以第二模式进行动作。具体如以下那样。主微型计算机11从解串器14m接收影像信号sgr1。图像处理处理器11p对影像信号sgr1实施第一处
理,来生成影像信号sgr2(步骤s110)。
[0205]
主微型计算机11将影像信号sgr2发送到串行器13m。另外,主微型计算机11将影像信号sgr2的发送指令作为控制信号sg3发送到串行器13m(步骤s111)。
[0206]
串行器13m当接收到控制信号sg3时,将从主微型计算机11接收到的影像信号sgr2串行化(步骤s112)。串行器13m将串行化后的影像信号sgr2发送到显示单元20(步骤s113)。
[0207]
另外,主微型计算机11将影像信号sgr2发送到串行器13p。另外,主微型计算机11将影像信号sgr2的发送指令作为控制信号sg1发送到串行器13p(步骤s114)。
[0208]
串行器13p当接收到控制信号sg1时,将从主微型计算机11接收到的影像信号sgr2串行化(步骤s115)。串行器13p将串行化后的影像信号sgr2发送到显示器单元40(步骤s116)。
[0209]
此外,也可以并行进行上述的步骤s111~s113的处理以及步骤s114~s116的处理。
[0210]
通过以上,实施方式的行车记录器单元10所进行的处理结束。
[0211]
从第一模式向第二模式的切换既可以在主微型计算机11变为能够实施第一处理的时刻即第一时刻进行,也可以在第一时刻之后的时刻进行。例如,也可以在车辆5处于停车中的、在第一时刻之后的第二时刻进行从第一模式向第二模式的切换。由此,显示装置25中显示的影像在行驶中不进行切换,因此驾驶员不易分心于影像的切换。因而,能够进一步确保车辆行驶中的安全性。例如,也可以是,主微型计算机11从can(controller area network:控制器局域网)接收车辆5的速度信息,在车辆5的速度为固定以下的情况下判断为车辆5处于停车中,从而进行向第二模式的切换。或者,也可以是,主微型计算机11具备加速度传感器,在车辆5的加速度为固定以下的情况下判断为车辆5处于停车中,从而进行向第二模式的切换。
[0212]
从第一模式向第二模式的切换或者从第二模式向第一模式的切换既可以由主微型计算机11自动进行,也可以通过用户操作来进行。例如,也可以是,在行车记录器单元10以第一模式进行动作的期间,在变为能够向第二模式切换的时刻,向用户通知能够向第二模式切换,在从用户受理了切换为第二模式这一指示的时刻,主微型计算机11切换为第二模式。
[0213]
也可以是,在从第一模式向第二模式切换时、或者从第二模式向第一模式切换时,使显示装置25显示黑屏。在将显示装置25中显示的影像从第一影像切换为第二影像、或者从第二影像切换为第一影像时,可能产生影像的紊乱。通过将显示装置25中显示的影像从第一影像首先变更为黑屏,之后切换为第二影像,从而能够防止在显示装置25中显示紊乱的影像。
[0214]
也可以是,在从第一模式向第二模式切换时、或者从第二模式向第一模式切换时,使显示装置25显示紧挨着切换之前显示的影像。例如,也可以是,使紧挨着从第一模式向第二模式切换之前显示的影像作为静止图像在显示装置25中显示了固定期间,之后,切换为第二模式。固定期间是指与可能产生影像的紊乱的期间同等、或者比该期间长的时间。固定期间例如是50毫秒。由此,也能够防止在显示装置25中显示紊乱的影像。
[0215]
(第一实施方式的效果)
[0216]
本实施方式的行车记录器单元10能够通过主微型计算机11是否能够实施第一处
理来切换显示装置25中显示的影像。
[0217]
例如,在主微型计算机11中,有时从启动起到变为能够实施第一处理为止需要固定的时间。若在从启动起到开始第一处理为止的期间显示装置25中不显示影像,则难以使用显示装置25进行后方确认,因此对于驾驶员而言是不方便的。
[0218]
在主微型计算机11中处于不能实施第一处理的状况的情况下,本实施方式的行车记录器单元10能够使显示装置25显示第一影像。然后,若主微型计算机11变为能够实施第一处理,则能够使显示装置25显示实施了第一处理后生成的影像即第二影像。由此,能够维持显示装置25中的影像的显示,并且能够在期望的时期显示进行了图像处理后的影像。另外,能够使显示装置25容易地符合联合国第46条(un-r46:united nations-regulation46)的安全基准。un-r46的安全基准规定显示装置必须在从启动起规定的时间内显示影像。
[0219]
[第二实施方式]
[0220]
第二实施方式所涉及的行车记录器单元10a与第一实施方式所涉及的行车记录器单元10的不同之处在于,具备副微型计算机12。下面,使用图4和图5来说明行车记录器单元10a。针对与第一实施方式中说明了的结构、动作相同的结构、动作,使用相同的附图标记,由此省略或简化其说明。
[0221]
图4是示出第二实施方式所涉及的影像处理系统1a的结构的一例的框图。
[0222]
行车记录器单元10a具备主微型计算机11、副微型计算机12、串行器13m以及解串器14m。行车记录器单元10a也可以具备串行器13p和解串器14p。下面,说明行车记录器单元10a具备串行器13p和解串器14p的例子。
[0223]
副微型计算机12是具备cpu、rom以及ram的计算机。副微型计算机12例如构成为mcu(micro controller unit:微控制器单元)。副微型计算机12是第一控制部的一例。
[0224]
主微型计算机11与副微型计算机12能够彼此独立地工作。因而,即使例如主微型计算机11中发生某种故障,副微型计算机12也能够持续工作。因而,例如继续进行显示装置25所进行的影像的显示。
[0225]
也可以是,副微型计算机12的启动所花费的时间比主微型计算机11的启动所花费的时间短。主微型计算机11例如具有记录功能、图像处理功能,因此有时启动花费时间。即使在例如主微型计算机11尚未启动的情况下,只要副微型计算机12已启动,则也能够由副微型计算机12继续进行显示装置25所进行的影像的显示。
[0226]
副微型计算机12通过向串行器13m发送控制信号sg5,来控制串行器13m。另外,副微型计算机12通过向解串器14m发送控制信号sg6,来控制解串器14m。
[0227]
从副微型计算机12向串行器13m发送控制信号sg5以及从副微型计算机12向解串器14m发送控制信号sg6例如是通过i2c形式来进行的。
[0228]
副微型计算机12通过向主微型计算机11发送状态信号sgs,来向主微型计算机11通知状态信息。另外,主微型计算机11通过向副微型计算机12发送状态信号sgs,来向副微型计算机12通知状态信息。状态信息包含主微型计算机11是否能够实施第一处理的信息。状态信息例如也可以包含关于主微型计算机11的状态、副微型计算机12的状态、后述的主控制块2中有无发生故障、以及后述的副控制块3中有无发生故障中的至少1个的信息。
[0229]
主微型计算机11与副微型计算机12之间发送接收状态信号sgs例如是通过uart形式来进行的。
[0230]
也可以是,行车记录器单元10a能够在使显示装置25显示第一影像的第一模式与使显示装置25显示第二影像的第二模式之间进行切换。在行车记录器单元10a以第一模式进行动作的情况下,副微型计算机12通过发送控制信号sg5,来将串行器13m控制为将影像信号sgr1发送到显示单元20。在行车记录器单元10a以第二模式进行动作的情况下,主微型计算机11通过发送控制信号sg3,来将串行器13m控制为将影像信号sgr2发送到显示单元20。
[0231]
当从后置摄像机32发送影像信号sgr1作为第一影像信号时,副微型计算机12通过向解串器14m发送控制信号sg6,来使解串器14m接收来自后置摄像机32的影像信号sgr1。
[0232]
解串器14m当接收到来自副微型计算机12的控制信号sg6时,接收从后置摄像机32发送的影像信号sgr1。解串器14m将影像信号sgr1发送到主微型计算机11和串行器13m。解串器14m也可以将影像信号sgr1仅发送到串行器13m。
[0233]
串行器13m当接收到来自副微型计算机12的控制信号sg5时,将从解串器14m接收到的影像信号sgr1发送到显示单元20。
[0234]
在此,主微型计算机11、串行器13p、解串器14p、前置摄像机31以及显示器单元40构成主控制块2。在主控制块2中,串行器13p、解串器14p、前置摄像机31以及显示器单元40处于主微型计算机11的管理下。
[0235]
另外,副微型计算机12、串行器13m、解串器14m、后置摄像机32以及显示单元20构成副控制块3。在副控制块3中,串行器13m、解串器14m、后置摄像机32以及显示单元20处于副微型计算机12的管理下。
[0236]
主控制块2与副控制块3能够彼此独立地工作。因而,即使例如主控制块2中发生某种故障,副控制块3也能够持续工作。通过副控制块3持续工作,从而例如能够继续进行显示装置25所进行的后方影像的显示。
[0237]
(行车记录器单元的处理例)
[0238]
接着,使用图5来说明第二实施方式的行车记录器单元10a所进行的处理的例子。图5是示出第二实施方式所涉及的行车记录器单元10a所进行的处理的过程的一例的流程图。在此,仅说明由后置摄像机32生成的影像信号的处理。
[0239]
如图5所示,当影像信号sgr1从后置摄像机32被发送到行车记录器单元10a时(步骤s201),副微型计算机12将影像信号sgr1的接收指令作为控制信号sg6发送到解串器14m(步骤s202)。
[0240]
解串器14m当接收到控制信号sg6时,从后置摄像机32接收影像信号sgr1(步骤s203)。解串器14m将影像信号sgr1解串化来转换为并行数据(步骤s204)。解串器14m将转换为并行数据后的影像信号sgr1发送到主微型计算机11和串行器13m(步骤s205)。
[0241]
在此,根据主微型计算机11是否能够实施第一处理,其后的处理发生分支(步骤s206)。主微型计算机11能够实施第一处理例如是指从主微型计算机11启动起经过了规定的时间的状况。副微型计算机12从主微型计算机11接收主微型计算机11是否能够执行第一处理的状态来作为状态信号sgs。
[0242]
在主微型计算机11不能实施第一处理的情况下(步骤s206:“否”),在副微型计算机12中进行处理以使行车记录器单元10a以第一模式进行动作。具体如以下那样。副微型计算机12将影像信号sgr1的发送指令作为控制信号sg5发送到串行器13m(步骤s207)。
[0243]
串行器13m当接收到控制信号sg5时,将从解串器14m接收到的影像信号sgr1串行化(步骤s208)。串行器13m将串行化后的影像信号sgr1发送到显示单元20(步骤s209)。
[0244]
在主微型计算机11能够实施第一处理的情况下(步骤s206:“是”),在主微型计算机11中进行处理以使行车记录器单元10a以第二模式进行动作。以下的处理与第一实施方式的步骤s110~步骤s116相同。
[0245]
通过以上,行车记录器单元10a所进行的处理结束。
[0246]
也可以是,在检测到主控制块2故障的情况下,进行从第二模式向第一模式的切换。检测到主控制块2故障的情况例如是指检测到主微型计算机11故障的情况。此时,副微型计算机12从主微型计算机11接收主控制块2中发生了故障的意思的状态来作为状态信号sgs。但是,例如在主微型计算机11本身中发生了故障的情况下,也有时不从主微型计算机11发送状态信号sgs。此外,上述的步骤s202~s205的处理由副微型计算机12来执行而与包含主微型计算机11的主控制块2是否正在通常工作无关。
[0247]
(第二实施方式的效果)
[0248]
在本实施方式中也能够获得与第一实施方式同样的效果。另外,第二实施方式的行车记录器单元10a具备彼此独立地工作的主微型计算机11和副微型计算机12。例如,在与主微型计算机11相比副微型计算机12更快启动的情况下,即使在主微型计算机11未启动的情况下,也能够由副微型计算机12开始向显示装置25显示影像。因而,能够使显示装置25容易地符合un-r46的安全基准。
[0249]
另外,本实施方式的行车记录器单元10a具备彼此独立地工作的属于主控制块2的结构和属于副控制块3的结构。由此,即使在属于主控制块2的结构中产生了故障的情况下,副控制块3也持续工作,由此继续进行显示装置25进行的影像的显示。因而,能够使显示装置25容易地符合un-r46的安全基准。
[0250]
[第三实施方式]
[0251]
第三实施方式所涉及的行车记录器单元10b与第一实施方式所涉及的行车记录器单元10的不同之处在于,图像处理处理器11p发送第一信号sgd1来代替影像信号sgr2。下面,使用图6和图7来说明行车记录器单元10b。针对与第一实施方式和第二实施方式中说明了的结构、动作相同的结构、动作,使用相同的附图标记,由此省略或简化其说明。
[0252]
(影像处理系统的结构例)
[0253]
图6是示出第三实施方式所涉及的影像处理系统1b的结构的一例的框图。如图6所示,第三实施方式的影像处理系统1b具备行车记录器单元10b、显示单元20b以及后置摄像机32。影像处理系统1b也可以包括显示器单元40b。
[0254]
在本实施方式中,行车记录器单元10b基于从后置摄像机32接收到的第一影像信号来生成第一信号。行车记录器单元10b也可以例如基于第一影像信号来探测在车辆5的周围存在的物体,并生成用于强调物体的强调信号来作为第一信号。
[0255]
行车记录器单元10b具备主微型计算机11、串行器13m以及解串器14m。行车记录器单元10b也可以具备串行器13p和解串器14p。下面,说明行车记录器单元10b具备串行器13p和解串器14p的例子。
[0256]
在本实施方式中,图像处理处理器11p基于影像信号sgr1生成第一信号sgd1,来代替生成影像信号sgr2。第一信号sgd1是第一信号的一例。能够通过对影像信号sgr1附加第
一信号sgd1,来获得影像信号sgr2。在后面描述本实施方式中的影像信号sgr2的生成。图像处理处理器11p将第一信号sgd1发送到串行器13m。换言之,主微型计算机11将第一信号sgd1发送到串行器13m。主微型计算机11也可以将第一信号sgd1转换为并行数据后发送到串行器13m。
[0257]
在此,具体说明第一信号。在第一实施方式中说明了第一处理,而在第一处理中附加于第一影像信号的信号是第一信号。例如,图像处理处理器11p在基于第一影像信号探测到在车辆5的周围存在的物体时,生成用于强调物体的强调信号来作为第一信号。下面,具体说明第一信号是强调信号的例子。第一信号也可以包含用于进行将因恶劣天气引起的图像中的噪声降低的处理的信号。具体地说,第一信号也可以包含用于进行去雨处理、去雪处理、或者去雾处理的信号。例如,也可以是,在主微型计算机11检测到根据第一影像信号生成的图像中存在雨、雪或者雾时,图像处理处理器11p生成如下信号来作为第一信号:能够通过附加到第一影像信号来调整第一影像信号的对比度,由此使雨、雪、或者雾不易看到。或者,第一信号也可以包含用于描绘路面标识、道路标识的信号。例如,也可以是,主微型计算机11在判断为根据第一影像信号生成的图像中的道路标识的一部分隐藏起来的情况下,生成用于描绘道路标识的信号来作为第一信号。
[0258]
图像处理处理器11p基于影像信号sgr1进行图像处理,来探测所拍摄到的后方影像中是否存在物体,在存在物体的情况下探测该物体的种类和从车辆5到该物体的距离。然后,图像处理处理器11p将用于对探测到的物体中的、离车辆5的距离为规定值以下的物体进行强调显示那样的强调信号生成为第一信号sgd1。规定值例如为20m。规定值也可以根据车辆5正在行驶的道路的种类而被设定为不同的值。例如,也可以是,在车辆5正在一般道路中行驶的情况下,规定值被设定为20m,在车辆5正在高速道路中行驶的情况下,规定值被设定为50m。图像处理处理器11p在探测到离车辆5的距离为规定值以下的多个物体时,也可以生成并非对所有物体进行强调显示、而是仅对离车辆5的距离更小的物体进行强调显示的第一信号sgd1。图像处理处理器11p也可以仅在探测到的物体为规定种类的物体时,生成用于对探测到的物体进行强调显示的强调信号即第一信号sgd1。例如,也可以仅在探测到的物体为汽车、两轮车或步行者时,生成第一信号sgd1。第一信号sgd1例如也可以是通过用框线围住探测到的物体来进行强调显示那样的强调信号。或者,第一信号sgd1也可以是通过表示探测到的物体的位置来进行强调显示那样的强调信号。例如,也可以是,在探测到位于车辆5的右侧的车辆时,第一信号sgd1是在右侧显示车辆的图标那样的强调信号。强调显示的方法不限于此。第一信号sgd1也可以包含用于调整色彩和对比度的信号。
[0259]
串行器13m当接收到来自主微型计算机11的控制信号sg3时,将从解串器14m接收到的影像信号sgr1单独地发送到显示单元20b,或者将影像信号sgr1和从主微型计算机11接收到的第一信号sgd1发送到显示单元20b。
[0260]
也可以是,行车记录器单元10b能够在使显示装置25显示第一影像的第一模式与使显示装置25显示第二影像的第二模式之间进行切换。在行车记录器单元10b以第一模式进行动作的情况下,主微型计算机11通过发送控制信号sg3,来将串行器13m控制为将影像信号sgr1发送到显示单元20b。在行车记录器单元10b以第二模式进行动作的情况下,主微型计算机11通过发送控制信号sg3,来将串行器13m控制为将影像信号sgr1和第一信号sgd1发送到显示单元20b。
[0261]
主微型计算机11通过发送控制信号sg1,来将串行器13p控制为将影像信号sgr1、第一信号sgd1以及影像信号sgf2发送到显示器单元40b。
[0262]
串行器13p当接收到来自主微型计算机11的控制信号sg1时,将从主微型计算机11接收到的影像信号sgr1及第一信号sgd1和从主微型计算机11接收到的影像信号sgf2发送到显示器单元40b。例如,也可以是,串行器13p在从主微型计算机11接收到被转换为并行数据后的影像信号sgr1时,将影像信号sgr1转换为串行数据后进行发送。
[0263]
从主微型计算机11向串行器13m发送影像信号sgr1例如是通过mipi形式来进行的。
[0264]
从主微型计算机11向串行器13m发送第一信号sgd1例如是通过i2c形式来进行的。
[0265]
另外,从串行器13p向显示器单元40b发送影像信号sgr1、以及从串行器13m向显示单元20b发送第一信号sgd1例如是通过fpd-link iii形式来进行的。
[0266]
这些影像传输既可以通过有线通信来进行,也可以通过无线通信来进行。例如,也可以通过使用同轴线缆的有线通信来进行影像传输。例如,也可以通过使用wi-fi(注册商标)的无线通信来进行影像传输。
[0267]
影像信号sgr1、或者影像信号sgr1及第一信号sgd1由ecu 21接收。ecu 21与影像信号生成部对应。ecu 21对影像信号sgr1附加第一信号sgd1,由此生成影像信号sgr2。ecu 21对影像信号sgr1或者影像信号sgr2实施影像处理。影像处理例如是以适于显示装置25中的显示的方式进行的、对色彩和对比度的调整。
[0268]
由ecu 21实施了影像处理后的影像信号sgr1或者影像信号sgr2被传送到显示装置25。显示装置25显示第一影像或者第二影像,该第一影像是基于影像信号sgr1生成的影像,该第二影像是基于影像信号sgr2生成的影像。第一影像和第二影像例如用于车辆5的后方确认。
[0269]
显示器单元40b也可以具备影像信号生成部。在显示器单元40b具备影像信号生成部的情况下,显示器单元40b将接收到的影像信号sgr1、第一信号sgd1以及影像信号sgf2发送到影像信号生成部。影像信号生成部对影像信号sgr1附加第一信号sgd1,由此生成影像信号sgr2。
[0270]
影像信号生成部将影像信号sgr2和影像信号sgf2发送到显示器45。显示器45能够基于接收到的影像信号sgr2和影像信号sgf2来显示第三影像和第四影像。
[0271]
(行车记录器单元的处理例)
[0272]
接着,使用图7来说明第三实施方式的行车记录器单元10b所进行的处理的例子。图7是示出第三实施方式所涉及的行车记录器单元10b所进行的处理的过程的一例的流程图。在此,仅说明由后置摄像机32生成的影像信号的处理。
[0273]
关于步骤s101至步骤s105,由于与第一实施方式相同,因此省略说明。
[0274]
在步骤s306中,根据在主微型计算机11中是否能够生成第一信号,其后的处理发生分支。在主微型计算机11中能够生成第一信号的状态是指图像处理处理器11p已启动的状态。例如当从主微型计算机11启动起经过规定的时间时,图像处理处理器11p进行启动。此外,即使在主微型计算机11中不能生成第一信号的情况下,只要能够进行串行器13m、解串器14m、串行器13p以及解串器14p的控制,则也能够执行步骤s102和后述的步骤s107。
[0275]
在主微型计算机11中不能生成第一信号的情况下(步骤s306:“否”),在主微型计
算机11中进行处理以使行车记录器单元10b以第一模式进行动作。具体地说,进行步骤s107至步骤s109的工序。关于步骤s107至步骤s109,由于与第一实施方式相同,因此省略说明。
[0276]
在主微型计算机11中能够生成第一信号的情况下(步骤s306:“是”),在主微型计算机11中进行处理以使行车记录器单元10b以第二模式进行动作。具体如以下那样。主微型计算机11从解串器14m接收影像信号sgr1。图像处理处理器11p基于影像信号sgr1来生成第一信号sgd1(步骤s307)。
[0277]
主微型计算机11将第一信号sgd1发送到串行器13m。另外,主微型计算机11将影像信号sgr1和第一信号sgd1的发送指令作为控制信号sg3发送到串行器13m(步骤s308)。
[0278]
串行器13m当接收到控制信号sg3时,将从解串器14m接收到的影像信号sgr1串行化(步骤s309)。串行器13m将串行化后的影像信号sgr1和第一信号sgd1发送到显示单元20b(步骤s310)。
[0279]
另外,主微型计算机11将影像信号sgr1和第一信号sgd1发送到串行器13p。另外,主微型计算机11将影像信号sgr1和第一信号sgd1的发送指令作为控制信号sg1发送到串行器13p(步骤s311)。
[0280]
串行器13p当接收到控制信号sg1时,将从主微型计算机11接收到的影像信号sgr1串行化(步骤s312)。串行器13p将串行化后的影像信号sgr1和第一信号sgd1发送到显示器单元40(步骤s313)。
[0281]
此外,也可以并行进行上述的步骤s308~s310的处理以及步骤s311~s313的处理。
[0282]
通过以上,实施方式的行车记录器单元10b所进行的处理结束。
[0283]
(第三实施方式的效果)
[0284]
在本实施方式中也能够获得与第一实施方式同样的效果。另外,在本实施方式中,图像处理处理器11p发送第一信号sgd1来代替影像信号sgr2。也就是说,与第一实施方式相比,能够减少来自图像处理处理器11p的影像输出数量。由此,能够使用影像输出数量少的、便宜的处理器来作为图像处理处理器11p。
[0285]
[第四实施方式]
[0286]
第四实施方式所涉及的行车记录器单元10c与第三实施方式所涉及的行车记录器单元10b的不同之处在于,具备副微型计算机12。下面,使用图8和图9来说明行车记录器单元10c。针对与第一实施方式至第三实施方式中说明了的结构、动作相同的结构、动作,使用相同的附图标记,由此省略或简化其说明。
[0287]
图8是示出第四实施方式所涉及的影像处理系统1c的结构的一例的框图。
[0288]
行车记录器单元10c具备主微型计算机11、副微型计算机12、串行器13m以及解串器14m。行车记录器单元10c也可以具备串行器13p和解串器14p。下面,说明行车记录器单元10c具备串行器13p和解串器14p的例子。
[0289]
副微型计算机12通过向主微型计算机11发送状态信号sgs,来向主微型计算机11通知状态信息。另外,主微型计算机11通过向副微型计算机12发送状态信号sgs,来向副微型计算机12通知状态信息。在本实施方式中,状态信息包含主微型计算机11中是否能够生成第一信号的信息。
[0290]
主微型计算机11也可以经由副微型计算机12将第一信号sgd1发送到显示单元
20b。主微型计算机11也可以将第一信号sgd1发送到副微型计算机12。从主微型计算机11向副微型计算机12发送第一信号sgd1例如是利用spi通信通过i2c形式来进行的。副微型计算机12也可以将从主微型计算机11接收到的第一信号sgd1发送到显示单元20b。副微型计算机12也可以将第一信号sgd1经由串行器13m发送到显示单元20b。从副微型计算机12向串行器13m发送第一信号sgd1、以及从串行器13m向显示单元20b发送第一信号sgd1例如是通过i2c形式来进行的。副微型计算机12也可以将第一信号sgd1直接发送到显示单元20b。从副微型计算机12向显示单元20b发送第一信号sgd1例如是通过can来进行的。
[0291]
也可以是,行车记录器单元10c能够在使显示装置25显示第一影像的第一模式与使显示装置25显示第二影像的第二模式之间进行切换。在行车记录器单元10c以第一模式进行动作的情况下,副微型计算机12通过发送控制信号sg5,来将串行器13m控制为将影像信号sgr1发送到显示单元20b。在行车记录器单元10c以第二模式进行动作的情况下,主微型计算机11通过发送控制信号sg3,来将串行器13m控制为将影像信号sgr1及第一信号sgd1发送到显示单元20b。
[0292]
(行车记录器单元的处理例)
[0293]
接着,使用图9来说明第四实施方式的行车记录器单元10c所进行的处理的例子。图9是示出第四实施方式所涉及的行车记录器单元10c所进行的处理的过程的一例的流程图。在此,仅说明由后置摄像机32生成的影像信号的处理。
[0294]
关于步骤s201至步骤s205,由于与第二实施方式相同,因此省略说明。
[0295]
在步骤s406中,根据在主微型计算机11中是否能够生成第一信号,其后的处理发生分支。在主微型计算机11中能够生成第一信号例如是指从主微型计算机11启动起经过了规定的时间的状况。副微型计算机12从主微型计算机11接收在主微型计算机11中是否能够生成第一信号的状态来作为状态信号sgs。
[0296]
在主微型计算机11中不能生成第一信号的情况下(步骤s406:“否”),在副微型计算机12中进行处理以使行车记录器单元10c以第一模式进行动作。具体地说,进行步骤s207至步骤s209的工序。关于步骤s207至步骤s209,由于与第二实施方式相同,因此省略说明。
[0297]
在主微型计算机11中能够生成第一信号的情况下(步骤s406:“是”),在主微型计算机11中进行处理以使行车记录器单元10c以第二模式进行动作。具体地说,进行步骤s307至步骤s313的工序。关于步骤s307至步骤s313,由于与第三实施方式相同,因此省略说明。
[0298]
通过以上,行车记录器单元10c所进行的处理结束。
[0299]
(第四实施方式的效果)
[0300]
在本实施方式中也能够获得与第二实施方式及第三实施方式同样的效果。
[0301]
[第五实施方式]
[0302]
第五实施方式所涉及的行车记录器单元10d与第三实施方式所涉及的行车记录器单元10b的不同点在于,ecu发送第一信号sgd1来代替图像处理处理器11p发送第一信号sgd1。下面,使用图10和图11来说明行车记录器单元10d。针对与第一实施方式至第四实施方式中说明了的结构、动作相同的结构、动作,使用相同的附图标记,由此省略或简化其说明。
[0303]
(影像处理系统的结构例)
[0304]
图10是示出第五实施方式所涉及的影像处理系统1d的结构的一例的框图。如图10
所示,第五实施方式的影像处理系统1d具备行车记录器单元10d、显示单元20b、后置摄像机32以及ecu 51。
[0305]
行车记录器单元10d具备主微型计算机11、串行器13m以及解串器14m。行车记录器单元10d也可以具备串行器13p和解串器14p。下面,说明行车记录器单元10d具备串行器13p和解串器14p的例子。
[0306]
ecu 51是电子控制单元。ecu 51例如构成为搭载于车辆的ecu(engine control unit:发动机控制单元)、ivi系统或者cdc(cockpit domain controller:座舱域控制器)的一部分。ecu 51基于从后置摄像机32接收到的影像信号sgr1生成第一信号sgd1。由ecu 51进行的第一信号sgd1的生成与第三实施方式中说明的由图像处理处理器11p进行的第一信号sgd1的生成相同。ecu 51将影像信号sgr1和第一信号sgd1发送到解串器14m。从ecu 51向解串器14m发送第一信号sgd1例如是通过i2c形式来进行的。
[0307]
当从ecu 51发送来影像信号sgr1和第一信号sgd1时,主微型计算机11通过向解串器14m发送控制信号sg4,来使解串器14m接收影像信号sgr1和第一信号sgd1。
[0308]
解串器14m当接收到来自主微型计算机11的控制信号sg4时,接收影像信号sgr1和第一信号sgd1。解串器14m将影像信号sgr1和第一信号sgd1发送到主微型计算机11和串行器13m。从解串器14m向串行器13m发送第一信号sgd1例如是通过i2c形式来进行的。
[0309]
主微型计算机11从解串器14m接收影像信号sgr1和第一信号sgd1。具体地说,图像处理处理器11p从解串器14m接收影像信号sgr1和第一信号sgd1。图像处理处理器11p将影像信号sgr1和第一信号sgd1发送到串行器13p。换言之,主微型计算机11将影像信号sgr1和第一信号sgd1发送到串行器13p。在本实施方式中,主微型计算机11也可以不将影像信号sgr1和第一信号sgd1发送到串行器13m。
[0310]
串行器13m当接收到来自主微型计算机11的控制信号sg3时,将从解串器14m接收到的影像信号sgr1单独地发送到显示单元20b,或者将影像信号sgr1和从主微型计算机11接收到的第一信号sgd1发送到显示单元20b。
[0311]
(行车记录器单元的处理例)
[0312]
接着,使用图11来说明第五实施方式的影像处理系统1d所进行的处理的例子。图11是示出第五实施方式所涉及的影像处理系统1d所进行的处理的过程的一例的流程图。在此,仅说明由后置摄像机32生成的影像信号的处理。
[0313]
从后置摄像机32向ecu 51发送影像信号sgr1(步骤s501)。
[0314]
根据在ecu 51中是否能够生成第一信号,其后的处理发生分支(步骤s502)。在ecu 51中能够生成第一信号的状态例如是指从ecu 51启动起经过了规定的时间的状态。
[0315]
在ecu 51中不能生成第一信号的情况下(步骤s502:“否”),在主微型计算机11中进行处理以使行车记录器单元10d以第一模式进行动作。具体如以下那样。
[0316]
主微型计算机11将影像信号sgr1的接收指令作为控制信号sg4发送到解串器14m(步骤s102)。
[0317]
解串器14m当接收到控制信号sg4时,从ecu 51接收影像信号sgr1(步骤s503)。下面,进行步骤s104、步骤s105、以及步骤s107至步骤s109的工序。关于步骤s104、步骤s105、以及步骤s107至步骤s109,由于与第一实施方式相同,因此省略说明。
[0318]
在ecu 51中能够生成第一信号的情况下(步骤s502:“是”),ecu 51基于影像信号
sgr1来生成第一信号sgd1(步骤s504)。另外,在主微型计算机11中进行处理以使行车记录器单元10d以第二模式进行动作。具体如以下那样。
[0319]
主微型计算机11将影像信号sgr1和第一信号sgd1的接收指令作为控制信号sg4发送到解串器14m(步骤s505)。
[0320]
解串器14m当接收到控制信号sg4时,从ecu 51接收影像信号sgr1和第一信号sgd1(步骤s506)。解串器14m将影像信号sgr1解串化来转换为并行数据(步骤s507)。解串器14m将转换为并行数据后的影像信号sgr1和第一信号sgd1发送到主微型计算机11和串行器13m(步骤s508)。
[0321]
主微型计算机11将影像信号sgr1和第一信号sgd1的发送指令作为控制信号sg3发送到串行器13m(步骤s509)。
[0322]
下面,进行步骤s309至步骤s313的工序。关于步骤s309至步骤s313,由于与第三实施方式相同,因此省略说明。
[0323]
此外,也可以并行进行上述的步骤s508~s310的处理以及步骤s311~s313的处理。
[0324]
通过以上,实施方式的影像处理系统1d所进行的处理结束。
[0325]
(第五实施方式的效果)
[0326]
在本实施方式中也能够获得与第三实施方式同样的效果。另外,在本实施方式中,ecu 51发送第一信号sgd1来代替图像处理处理器11p发送第一信号sgd1。也就是说,图像处理处理器11p可以不具备生成第一信号sgd1的功能。例如,图像处理处理器11p无需具备探测在车辆5的周围存在的物体的功能。由此,能够使用便宜的处理器来作为图像处理处理器11p。
[0327]
本实施方式的行车记录器单元10d也可以具备第二实施方式中说明那样的副微型计算机。在该情况下,能够获得与第二实施方式同样的效果。
[0328]
[第六实施方式]
[0329]
在第六实施方式中,与第三实施方式所涉及的行车记录器单元10b的不同之处在于,显示装置15与行车记录器单元10e搭载为一体。下面,使用图12和图13来说明行车记录器单元10e。针对与第一实施方式至第五实施方式中说明了的结构、动作相同的结构、动作,使用相同的附图标记,由此省略或简化其说明。
[0330]
(影像处理系统的结构例)
[0331]
图12是示出第六实施方式所涉及的影像处理系统1e的结构的一例的框图。如图12所示,第六实施方式的影像处理系统1e具备行车记录器单元10e和后置摄像机32。影像处理系统1e也可以具备显示器单元40b。
[0332]
行车记录器单元10e具备主微型计算机11、解串器14m、显示装置15以及影像处理器16。行车记录器单元10e也可以具备串行器13p和解串器14p。下面,说明行车记录器单元10e具备串行器13p和解串器14p的例子。
[0333]
影像处理器16与ecu 21同样地构成。影像处理器16与影像信号生成部对应。由影像处理器16实施了影像处理后的影像信号sgr1或者影像信号sgr2被传送到显示装置15。影像处理器16也可以将影像信号sgr1和影像信号sgr2串行化后实施影像处理。
[0334]
也可以是,行车记录器单元10e能够在使显示装置15显示第一影像的第一模式与
使显示装置15显示第二影像的第二模式之间进行切换。在行车记录器单元10e以第一模式进行动作的情况下,主微型计算机11通过发送控制信号sg3,来将影像处理器16控制为使显示装置15显示第一影像。具体地说,影像处理器16对影像信号sgr1实施影像处理,并将实施了影像处理后的影像信号sgr1发送到显示装置15。在行车记录器单元10e以第二模式进行动作的情况下,主微型计算机11通过发送控制信号sg3,来将影像处理器16控制为使显示装置15显示第二影像。具体地说,影像处理器16对影像信号sgr1附加第一信号sgd1,来生成影像信号sgr2。另外,影像处理器16对影像信号sgr2实施影像处理,并将实施了影像处理后的影像信号sgr2发送到显示装置15。
[0335]
显示装置15显示第一影像或者第二影像,该第一影像是基于影像信号sgr1生成的影像,该第二影像是基于影像信号sgr2生成的影像。第一影像和第二影像例如用于车辆5的后方确认。显示装置15与显示装置25同样地构成。在本实施方式中,显示装置15是呈车内后视镜形状的电子镜。换言之,行车记录器单元10e是将电子镜与行车记录器构成为一体而形成的。
[0336]
在本实施方式中,图像处理处理器11p将第一信号sgd1发送到影像处理器16。换言之,主微型计算机11将第一信号sgd1发送到影像处理器16。主微型计算机11也可以将第一信号sgd1转换为并行数据后发送到影像处理器16。从主微型计算机11向影像处理器16发送第一信号sgd1例如是通过i2c形式来进行的。
[0337]
解串器14m将影像信号sgr1发送到主微型计算机11和影像处理器16。解串器14m也可以将接收到的影像信号sgr1转换为并行数据后进行发送。从解串器14m向影像处理器16发送影像信号sgr1例如是通过mipi形式来进行的。
[0338]
(行车记录器单元的处理例)
[0339]
接着,使用图13来说明第六实施方式的行车记录器单元10e所进行的处理的例子。图13是示出第六实施方式所涉及的行车记录器单元10e所进行的处理的过程的一例的流程图。在此,仅说明由后置摄像机32生成的影像信号的处理。
[0340]
关于步骤s101至步骤s104,由于与第一实施方式相同,因此省略说明。
[0341]
解串器14m将转换为并行数据后的影像信号sgr1发送到主微型计算机11和影像处理器16(步骤s605)。
[0342]
在步骤s606中,根据在主微型计算机11中是否能够生成第一信号,其后的处理发生分支。在主微型计算机11中不能生成第一信号的情况下(步骤s606:“否”),在主微型计算机11中进行处理以使行车记录器单元10e以第一模式进行动作。具体地说,主微型计算机11将影像信号sgr1的发送指令作为控制信号sg3发送到影像处理器16(步骤s607)。
[0343]
影像处理器16当接收到控制信号sg3时,对从解串器14m接收到的影像信号sgr1实施影像处理(步骤s608)。影像处理器16将实施了影像处理后的影像信号sgr1发送到显示装置15(步骤s609)。
[0344]
在主微型计算机11中能够生成第一信号的情况下(步骤s606:“是”),在主微型计算机11中进行处理以使行车记录器单元10e以第二模式进行动作。具体如以下那样。主微型计算机11从解串器14m接收影像信号sgr1。图像处理处理器11p基于影像信号sgr1来生成第一信号sgd1(步骤s610)。
[0345]
主微型计算机11将第一信号sgd1发送到影像处理器16。另外,主微型计算机11将
影像信号sgr1和第一信号sgd1的发送指令作为控制信号sg3发送到影像处理器16(步骤s611)。
[0346]
影像处理器16当接收到控制信号sg3时,对从解串器14m接收到的影像信号sgr1附加第一信号sgd1,来生成影像信号sgr2。另外,影像处理器16对影像信号sgr2实施影像处理(步骤s612)。影像处理器16将实施了影像处理后的影像信号sgr2发送到显示装置15(步骤s613)。
[0347]
下面,进行步骤s311至步骤s313的工序。关于步骤s311至步骤s313,由于与第三实施方式相同,因此省略说明。
[0348]
此外,也可以并行进行上述的步骤s611~s613的处理以及步骤s311~s313的处理。
[0349]
通过以上,实施方式的行车记录器单元10e所进行的处理结束。
[0350]
(第六实施方式的效果)
[0351]
在本实施方式中也能够获得与第三实施方式同样的效果。另外,在本实施方式中,显示装置15与行车记录器单元10e形成为一体。由此,能够缩短从摄像到影像显示的图像处理工序和图像信息发送路径。
[0352]
本实施方式的行车记录器单元10e也可以具备第二实施方式中说明那样的副微型计算机。在该情况下,能够获得与第二实施方式同样的效果。
[0353]
在本公开的各实施方式中,行车记录器单元使显示装置25和显示器45显示影像,但是也可以使其它显示器显示影像。例如,也可以是,行车记录器单元使仪表显示器或者平视显示器显示影像。
[0354]
本公开的各实施方式中的行车记录器单元也可以构成为与ivi系统一体化,形成ivi系统的一部分。
[0355]
虽然说明了本公开的若干个实施方式,但是这些实施方式是作为例子呈现的,并不意图限定发明的范围。这些实施方式能够以其它各种方式来实施,能够在不脱离发明的主旨的范围内进行各种省略、置换、变更。这些实施方式及其变形例包含于发明的范围和主旨,同样地,它们包含于权利要求书所记载的发明及其等同的范围。
[0356]
根据本公开所涉及的影像处理装置和影像处理系统,能够维持影像的显示,并且能够在期望的时期显示进行了图像处理后的影像。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。