1.本发明属于建筑垃圾处理技术领域,涉及一种建筑垃圾拆除分类回收机器人。
背景技术:
2.建筑垃圾是指在工程中由于人为或者自然等原因产生的建筑废料,包括废渣土、弃土、淤泥以及弃料等,这些材料对于建筑本身而言是没有任何帮助的,但却是在建筑的过程中产生的物质,需要进行相应的处理,随着智能化设备的不断发展,使用者可利用智能机器人对建筑垃圾拆除和分类处理。
3.然而传统建筑垃圾拆除分类回收机器人对不同规格建筑垃圾的分类效果差,无法将不同规格的建筑垃圾进行快速且精准的分类,需要使用者后期重复分类程序,才能对建筑垃圾进行完全分类,十分浪费时间,同时传统建筑垃圾拆除分类回收机器人无法将建筑垃圾中的小块钢筋进行回收,会造成资源的严重浪费。
技术实现要素:
4.有鉴于此,本发明为了解决传统建筑垃圾拆除分类回收机器人对不同规格建筑垃圾的分类效果差,无法将不同规格的建筑垃圾进行快速且精准的分类和无法将建筑垃圾中的小块钢筋进行回收,会造成资源严重浪费的问题,提供一种建筑垃圾拆除分类回收机器人。
5.为达到上述目的,本发明提供如下技术方案:
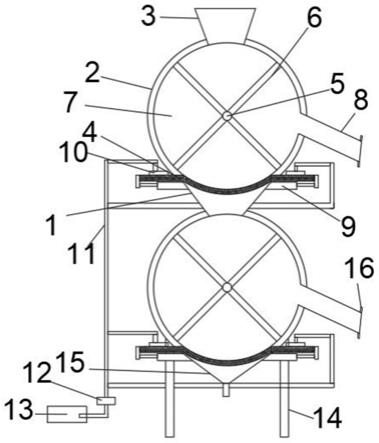
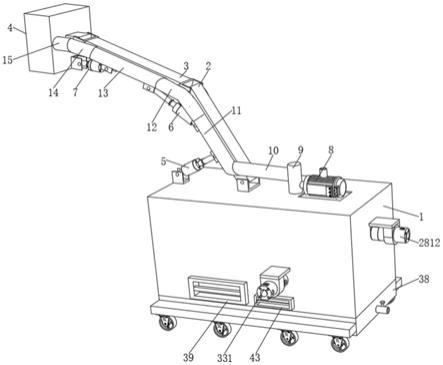
6.一种建筑垃圾拆除分类回收机器人,包括放置箱,放置箱的顶部通过活动座转动连接有第一延伸板,第一延伸板的一侧通过活动座转动连接有第二延伸板,第二延伸板的一侧通过活动座转动连接有连接板,且连接板的一侧设置有防护罩,第一延伸板的一侧通过活动座转动连接有第一气缸且第一气缸的一端通过活动座转动连接在放置箱上,第二延伸板的一侧通过活动座转动连接有第二气缸且第二气缸的一端通过活动座转动连接在第二延伸板的一侧,第二延伸板的一侧通过活动座转动连接有第三气缸且第三气缸的一端通过活动座转动连接在防护罩上,第一延伸板和第二延伸板的正面分别设置有第一管道和第二管道,第一管道和第二管道相互靠近的一端连通有第一软管,第二管道的一端连通有第二软管,第二软管的一端连通有吸管且吸管的一端贯穿至防护罩内,第一管道远离第一软管的一端连通有连接软管,放置箱上连通有固定管且连接软管的一端与固定管的一侧连通,固定管的另一侧连通有抽气泵且抽气泵的底部设置在放置箱上,放置箱背面的一侧设置有水箱,水箱上设置有高压泵,高压泵的吸水口通过吸水管贯穿至水箱内,高压泵的出水口通过出水管连通有三通管,三通管的两端分别连通有通水管和弯管,通水管的一端贯穿至放置箱内并连通有分流器,分流器的底部沿前后方向连通有多组喷头,第一延伸板和第二延伸板的背面分别设置有第一输水管和第二输水管,第一输水管的一端连通有接水软管且接水软管的一端与弯管的一端连通,第一输水管和第二输水管相互靠近的一端连通有第一通水软管,第二输水管的一端通过第二通水软管连通有喷枪且喷枪的一端贯穿至防护罩
内,放置箱内设置有筛选机构,放置箱内腔的底部设置有固定架,固定架底部的一侧设置有斜板,固定架底部的另一侧贴合有与斜板配合使用的限位板,限位板正面和背面的一侧嵌设有旋转轴且旋转轴的两端分别通过轴承转动装设在放置箱内腔的正面和背面,固定架内设置有除杂机构,放置箱内腔的底部设置有隔离网。
7.进一步,筛选机构包括滑杆,滑杆设置在放置箱内腔两侧的正面和背面,滑杆上滑动设置有滑套,滑套相互靠近的一侧设置有安装架,安装架内通过活动轴转动连接有固定框,固定框上嵌设有防护网,防护网上横向开设有空槽,固定管的底端贯穿通槽并延伸至固定框内,防护网顶部的一侧沿前后方向设置有多根钢丝绳,钢丝绳的一端设置在放置箱内腔的顶部,放置箱的一侧通过固定座固定连接有第四气缸,第四气缸的活塞杆贯穿至放置箱内并设置在安装架上,固定框内设置有筛网,筛网的底部设置有筛框,筛框的底部连通有下料软管且下料软管的一端与固定架的顶部连通,筛网的底部设置有挡板且挡板的正面和背面与固定框内腔的正面和背面固定连接,挡板的一侧沿前后方向设置有多组第一弹簧且第一弹簧的一端设置在固定架的一侧,可对不同规格的建筑垃圾进行快速分类处理。
8.进一步,除杂机构包括第五气缸,第五气缸的表面通过固定座设置在放置箱的正面,第五气缸的活塞杆贯穿至放置箱内并固定连接有电磁铁且电磁铁位于固定架内,电磁铁呈u型结构,放置箱内腔的背面开设有与电磁铁配合使用的通槽,放置箱的背面设置有定位架且定位架位于通槽的背面,放置箱背面的底部设置有卡座,卡座上卡接有集料箱且集料箱的顶部与定位架的底部贴合,定位架内腔通过滑道滑动设置有滑板,且滑板相互靠近的一侧设置有插板,插板的正面贴合在放置箱上,可对小块钢筋进行吸附收集。
9.进一步,隔离网顶部一侧通过活动座转动连接有第一电动推杆且第一电动推杆的活塞杆通过活动座转动装设在限位板的底部,可对限位板的转动进行控制。
10.进一步,筛网顶部的一侧贴合有隔板,固定框的一侧通过固定座固定连接有第二电动推杆,第二电动推杆的活塞杆贯穿至固定框内并固定连接在隔板上,隔板一侧的四周均设置有限位杆且限位杆的一端贯穿固定框并固定连接有限位块,可方便大规格建筑垃圾快速下落。
11.进一步,隔离网顶部的两侧均开设有放置槽,且放置槽内沿左右方向分别卡接有与固定框和固定架配合使用的第一放置架和第二放置架,第一放置架和第二放置架的正面均贯穿放置箱并向正面延伸,第一放置架和第二放置架的正面均开设有凹槽,且凹槽内设置有把手,可对不同规格的建筑垃圾进行分类收集。
12.进一步,放置箱的底部设置有集水槽,集水槽的一侧连通有出液管,且出液管上设置有阀门,可对砂石和污水混合物进行收集。
13.进一步,隔离网顶部一侧的正面和背面均通过活动座转动连接有导向柱,第一电动推杆位于导向柱相互靠近的一侧,导向柱内设置有第二弹簧,第二弹簧的一端设置有滑座,且滑座的一侧设置有导向杆,导向杆的一端贯穿导向柱并通过活动座转动装设在限位板的底部,可辅助限位板平稳摆动。
14.进一步,固定架的一侧沿前后方向设置有多组第三弹簧,第三弹簧的一端设置在限位板上,钢丝绳相互靠近的一侧设置有连接拉绳,可对限位板进行缓冲,同时连接拉绳提高了钢丝绳之间的强度。
15.本发明的有益效果在于:
16.1、本发明所公开的一种建筑垃圾拆除分类回收机器人,通过设置筛选机构,利用第四气缸提供驱动源,在滑套和滑杆的滑动辅助下,第四气缸可利用安装架平稳推动固定框进行移动,方便带动其内部的筛网进行左右移动,便于对筛网上的废弃物进行初次筛分。
17.2、本发明所公开的一种建筑垃圾拆除分类回收机器人,安装架与固定框之间是通过活动轴转动连接的,在固定框移动时,固定长度的多组钢丝绳会对固定框顶部的防护网形成拉扯力,从而可带动左右方向移动中的固定框和筛网向上摆动,同时上摆的固定框会利用挡板带动多组第一弹簧进行拉伸,利用第一弹簧的弹性回弹,便于带动固定框快速向下复位,使固定框和筛网可在左右移动的同时上下移动,提高了筛网对不同规格废弃物的分类效果,使其可一次性分类完全,避免了需要多次重复筛选过程,提高了设备的工作效率。
18.3、本发明所公开的一种建筑垃圾拆除分类回收机器人,通过设置除杂机构,利用第五气缸提供驱动力,可带动电磁铁在固定架内平稳前后移动,u型结构设计的电磁铁可方便对固定架内废弃物中的小块钢筋进行快速吸附,同时插板的设计,可方便对通槽进行遮盖,对废弃物进行有效阻挡,同时定位架可对电磁铁进行阻挡,方便电磁铁吸附的小块钢筋可自主下落至集料箱内,方便对钢筋进行回收再利用,避免造成资源的严重浪费。
19.4、本发明所公开的一种建筑垃圾拆除分类回收机器人,通过设置第一电动推杆,限位板在旋转轴和轴承的辅助下可进行转动,同时利用第一电动推杆提供驱动力,可带动限位板以旋转轴为中心进行转动,方便对固定架的底部进行开合,便于将经过除去钢筋之后的废弃物快速进行快速排出收集,使设备更加智能化。
20.本发明能够通过筛选机构使筛网可在左右移动的同时上下移动,提高了筛网对不同规格废弃物的分类效果,使其可一次性分类完全,提高了工作效率,同时除杂机构可对经过初次筛选之后废弃物中的小块钢筋进行吸附,方便对钢筋进行回收再利用,避免造成资源的严重浪费,同时第一电动推杆可对固定架底部的开合进行控制,便于将经过除去钢筋之后的废弃物快速进行快速排出收集,使设备更加智能化。
21.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
22.为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
23.图1为本发明建筑垃圾拆除分类回收机器人的结构示意图;
24.图2为本发明建筑垃圾拆除分类回收机器人的结构剖视图;
25.图3为本发明建筑垃圾拆除分类回收机器人中固定框的结构剖视图;
26.图4为本发明建筑垃圾拆除分类回收机器人中高压泵、通水管和分流器的结构立体图;
27.图5为本发明建筑垃圾拆除分类回收机器人中固定架的结构侧视图;
28.图6为本发明建筑垃圾拆除分类回收机器人中除杂机构的结构局部立体图;
29.图7为本发明建筑垃圾拆除分类回收机器人的结构后视图;
30.图8为本发明建筑垃圾拆除分类回收机器人中电磁铁的结构立体图。
31.附图标记:1、放置箱;2、第一延伸板;3、第二延伸板;4、防护罩;5、第一气缸;6、第二气缸;7、第三气缸;8、抽气泵;9、固定管;10、连接软管;11、第一管道;12、第一软管;13、第二管道;14、第二软管;15、吸管;16、水箱;17、高压泵;18、三通管;19、通水管;20、弯管;21、接水软管;22、第一输水管;23、第一通水软管;24、第二输水管;25、喷枪;26、隔离网;27、分流器;28、筛选机构;281、滑杆;282、滑套;283、安装架;284、固定框;285、防护网;286、钢丝绳;287、筛网;288、筛框;289、挡板;2810、第一弹簧;2811、下料软管;2812、第四气缸;29、固定架;30、斜板;31、旋转轴;32、限位板;33、除杂机构;331、第五气缸;332、电磁铁;333、定位架;334、插板;335、集料箱;34、第一电动推杆;35、导向柱;36、第二弹簧;37、导向杆;38、集水槽;39、第一放置架;40、第二电动推杆;41、隔板;42、限位杆;43、第二放置架;44、第三弹簧;45、卡座。
具体实施方式
32.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
33.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
34.本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本发明的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
35.实施例一
36.如图1-8所示的一种建筑垃圾拆除分类回收机器人,放置箱1的顶部通过活动座转动连接有第一延伸板2,第一延伸板2的一侧通过活动座转动连接有第二延伸板3,第二延伸板3的一侧通过活动座转动连接有连接板,且连接板的一侧设置有防护罩4,第一延伸板2的一侧通过活动座转动连接有第一气缸5且第一气缸5的一端通过活动座转动连接在放置箱1上,第二延伸板3的一侧通过活动座转动连接有第二气缸6且第二气缸6的一端通过活动座转动连接在第二延伸板3的一侧,第二延伸板3的一侧通过活动座转动连接有第三气缸7且第三气缸7的一端通过活动座转动连接在防护罩4上,第一延伸板2和第二延伸板3的正面分别设置有第一管道11和第二管道13,第一管道11和第二管道13相互靠近的一端连通有第一
软管12,第二管道13的一端连通有第二软管14,第二软管14的一端连通有吸管15且吸管15的一端贯穿至防护罩4内,第一管道11远离第一软管12的一端连通有连接软管10,放置箱1上连通有固定管9且连接软管10的一端与固定管9的一侧连通,固定管9的另一侧连通有抽气泵8且抽气泵8的底部设置在放置箱1上。
37.放置箱1背面的一侧设置有水箱16,水箱16上设置有高压泵17,高压泵17的吸水口通过吸水管贯穿至水箱16内,高压泵17的出水口通过出水管连通有三通管18,三通管18的两端分别连通有通水管19和弯管20,通水管19的一端贯穿至放置箱1内并连通有分流器27,分流器27的底部沿前后方向连通有多组喷头,第一延伸板2和第二延伸板3的背面分别设置有第一输水管22和第二输水管24,第一输水管22的一端连通有接水软管21且接水软管21的一端与弯管20的一端连通,第一输水管22和第二输水管24相互靠近的一端连通有第一通水软管23,第二输水管24的一端通过第二通水软管连通有喷枪25且喷枪25的一端贯穿至防护罩4内,放置箱1内设置有筛选机构28。
38.放置箱1内腔的底部设置有固定架29,固定架29底部的一侧设置有斜板30,固定架29底部的另一侧贴合有与斜板30配合使用的限位板32,限位板32正面和背面的一侧嵌设有旋转轴31且旋转轴31的两端分别通过轴承转动装设在放置箱1内腔的正面和背面,固定架29内设置有除杂机构33,放置箱1内腔的底部设置有隔离网26,放置箱1的底部设置有集水槽38,集水槽38的一侧连通有出液管,且出液管上设置有阀门,集水槽38可方便对放置箱1内经由隔离网26下落的砂石和污水混合物进行收集,以便对其再次利用。
39.本发明中,筛选机构28包括滑杆281,滑杆281设置在放置箱1内腔两侧的正面和背面,滑杆281上滑动设置有滑套282,滑套282相互靠近的一侧设置有安装架283,安装架283内通过活动轴转动连接有固定框284,固定框284上嵌设有防护网285,防护网285上横向开设有空槽,固定管9的底端贯穿通槽并延伸至固定框284内,防护网285顶部的一侧沿前后方向设置有多根钢丝绳286,钢丝绳286的一端设置在放置箱1内腔的顶部,放置箱1的一侧通过固定座固定连接有第四气缸2812,第四气缸2812的活塞杆贯穿至放置箱1内并设置在安装架283上,固定框284内设置有筛网287,筛网287的底部设置有筛框288,筛框288的底部连通有下料软管2811且下料软管2811的一端与固定架29的顶部连通,筛网287的底部设置有挡板289且挡板289的正面和背面与固定框284内腔的正面和背面固定连接,挡板289的一侧沿前后方向设置有多组第一弹簧2810且第一弹簧2810的一端设置在固定架29的一侧,在滑套282和滑杆281的滑动辅助下,第四气缸2812可利用安装架283平稳推动固定框284进行移动,方便带动其内部的筛网287进行左右移动,对筛网287上的废弃物进行初次筛分,同时固定长度的多组钢丝绳286会对固定框284顶部的防护网285形成拉扯力,并在安装架283的辅助下,带动左右方向移动中的固定框284和筛网287向上摆动,同时利用第一弹簧2810的弹性回弹,便于带动固定框284快速向下复位,使固定框284和筛网287可在左右移动的同时上下移动,提高了筛网287对不同规格废弃物的分类效果。
40.本发明中,除杂机构33包括第五气缸331,第五气缸331的表面通过固定座设置在放置箱1的正面,第五气缸331的活塞杆贯穿至放置箱1内并固定连接有电磁铁332且电磁铁332位于固定架29内,电磁铁332呈u型结构,放置箱1内腔的背面开设有与电磁铁332配合使用的通槽,放置箱1的背面设置有定位架333且定位架333位于通槽的背面,放置箱1背面的底部设置有卡座45,卡座45上卡接有集料箱335且集料箱335的顶部与定位架333的底部贴
合,定位架333内腔通过滑道滑动设置有滑板,且滑板相互靠近的一侧设置有插板334,插板334的正面贴合在放置箱1上,第五气缸331可带动电磁铁332在固定架29内平稳前后移动,方便对固定架29内废弃物中的小块钢筋进行快速吸附,同时插板334可对废弃物进行有效阻挡,同时在定位架333的辅助下,方便电磁铁332吸附的小块钢筋可自主下落至集料箱335内,方便对钢筋进行回收再利用。
41.本发明中,隔离网26顶部一侧通过活动座转动连接有第一电动推杆34且第一电动推杆34的活塞杆通过活动座转动装设在限位板32的底部,第一电动推杆34可带动限位板32以旋转轴31为中心进行转动,方便对固定架29的底部进行开合,便于将经过除去钢筋之后的废弃物快速进行快速排出收集,使设备更加智能化。
42.本发明中,筛网287顶部的一侧贴合有隔板41,固定框284的一侧通过固定座固定连接有第二电动推杆40,第二电动推杆40的活塞杆贯穿至固定框284内并固定连接在隔板41上,隔板41一侧的四周均设置有限位杆42且限位杆42的一端贯穿固定框284并固定连接有限位块,利用第二电动推杆40作为驱动源,可带动隔板41进行移动,方便解除对筛网287一侧的遮挡状态,便于对筛网287上层的大规格废弃物进行倾倒,以便对其进行打包收集,同时多组限位杆42可对隔板41进行限位,防止隔板41在移动时错位。
43.本发明中,隔离网26顶部的两侧均开设有放置槽,且放置槽内沿左右方向分别卡接有与固定框284和固定架29配合使用的第一放置架39和第二放置架43,第一放置架39和第二放置架43的正面均贯穿放置箱1并向正面延伸,第一放置架39和第二放置架43的正面均开设有凹槽,且凹槽内设置有把手,第一放置架39和第二放置架43方便对不同规格的废弃物进行分类收集,便于使用者后期对不同规格的废弃物进行使用,同时放置槽可对第一放置架39和第二放置架43进行卡接限位,凹槽和把手的设计,可方便使用者将第一放置架39和第二放置架43快速抽离。
44.本发明中,隔离网26顶部一侧的正面和背面均通过活动座转动连接有导向柱35,第一电动推杆34位于导向柱35相互靠近的一侧,导向柱35内设置有第二弹簧36,第二弹簧36的一端设置有滑座,且滑座的一侧设置有导向杆37,导向杆37的一端贯穿导向柱35并通过活动座转动装设在限位板32的底部,利用第二弹簧36的弹性回弹,可利用滑座对导向杆37的伸缩长度进行弹性控制,方便辅助第一电动推杆34对限位板32进行更好的支撑。
45.实施例二
46.本实施例作为上一实施例的进一步改进,如图1-8所示,一种建筑垃圾拆除分类回收机器人,放置箱1的顶部通过活动座转动连接有第一延伸板2,第一延伸板2的一侧通过活动座转动连接有第二延伸板3,第二延伸板3的一侧通过活动座转动连接有连接板,且连接板的一侧设置有防护罩4,第一延伸板2的一侧通过活动座转动连接有第一气缸5且第一气缸5的一端通过活动座转动连接在放置箱1上,第二延伸板3的一侧通过活动座转动连接有第二气缸6且第二气缸6的一端通过活动座转动连接在第二延伸板3的一侧,第二延伸板3的一侧通过活动座转动连接有第三气缸7且第三气缸7的一端通过活动座转动连接在防护罩4上,第一延伸板2和第二延伸板3的正面分别设置有第一管道11和第二管道13,第一管道11和第二管道13相互靠近的一端连通有第一软管12,第二管道13的一端连通有第二软管14,第二软管14的一端连通有吸管15且吸管15的一端贯穿至防护罩4内,第一管道11远离第一软管12的一端连通有连接软管10,放置箱1上连通有固定管9且连接软管10的一端与固定管
9的一侧连通,固定管9的另一侧连通有抽气泵8且抽气泵8的底部设置在放置箱1上。
47.放置箱1背面的一侧设置有水箱16,水箱16上设置有高压泵17,高压泵17的吸水口通过吸水管贯穿至水箱16内,高压泵17的出水口通过出水管连通有三通管18,三通管18的两端分别连通有通水管19和弯管20,通水管19的一端贯穿至放置箱1内并连通有分流器27,分流器27的底部沿前后方向连通有多组喷头,第一延伸板2和第二延伸板3的背面分别设置有第一输水管22和第二输水管24,第一输水管22的一端连通有接水软管21且接水软管21的一端与弯管20的一端连通,第一输水管22和第二输水管24相互靠近的一端连通有第一通水软管23,第二输水管24的一端通过第二通水软管连通有喷枪25且喷枪25的一端贯穿至防护罩4内,放置箱1内设置有筛选机构28,放置箱1内腔的底部设置有固定架29,固定架29底部的一侧设置有斜板30,固定架29底部的另一侧贴合有与斜板30配合使用的限位板32,限位板32正面和背面的一侧嵌设有旋转轴31且旋转轴31的两端分别通过轴承转动装设在放置箱1内腔的正面和背面,固定架29内设置有除杂机构33,放置箱1内腔的底部设置有隔离网26,放置箱1的底部设置有集水槽38,集水槽38的一侧连通有出液管,且出液管上设置有阀门,集水槽38可方便对放置箱1内经由隔离网26下落的砂石和污水混合物进行收集,以便对其再次利用。
48.本发明中,筛选机构28包括滑杆281,滑杆281设置在放置箱1内腔两侧的正面和背面,滑杆281上滑动设置有滑套282,滑套282相互靠近的一侧设置有安装架283,安装架283内通过活动轴转动连接有固定框284,固定框284上嵌设有防护网285,防护网285上横向开设有空槽,固定管9的底端贯穿通槽并延伸至固定框284内,防护网285顶部的一侧沿前后方向设置有多根钢丝绳286,钢丝绳286的一端设置在放置箱1内腔的顶部,放置箱1的一侧通过固定座固定连接有第四气缸2812,第四气缸2812的活塞杆贯穿至放置箱1内并设置在安装架283上,固定框284内设置有筛网287,筛网287的底部设置有筛框288,筛框288的底部连通有下料软管2811且下料软管2811的一端与固定架29的顶部连通,筛网287的底部设置有挡板289且挡板289的正面和背面与固定框284内腔的正面和背面固定连接,挡板289的一侧沿前后方向设置有多组第一弹簧2810且第一弹簧2810的一端设置在固定架29的一侧,在滑套282和滑杆281的滑动辅助下,第四气缸2812可利用安装架283平稳推动固定框284进行移动,方便带动其内部的筛网287进行左右移动,对筛网287上的废弃物进行初次筛分,同时固定长度的多组钢丝绳286会对固定框284顶部的防护网285形成拉扯力,并在安装架283的辅助下,带动左右方向移动中的固定框284和筛网287向上摆动,同时利用第一弹簧2810的弹性回弹,便于带动固定框284快速向下复位,使固定框284和筛网287可在左右移动的同时上下移动,提高了筛网287对不同规格废弃物的分类效果。
49.本发明中,除杂机构33包括第五气缸331,第五气缸331的表面通过固定座设置在放置箱1的正面,第五气缸331的活塞杆贯穿至放置箱1内并固定连接有电磁铁332且电磁铁332位于固定架29内,电磁铁332呈u型结构,放置箱1内腔的背面开设有与电磁铁332配合使用的通槽,放置箱1的背面设置有定位架333且定位架333位于通槽的背面,放置箱1背面的底部设置有卡座45,卡座45上卡接有集料箱335且集料箱335的顶部与定位架333的底部贴合,定位架333内腔通过滑道滑动设置有滑板,且滑板相互靠近的一侧设置有插板334,插板334的正面贴合在放置箱1上,第五气缸331可带动电磁铁332在固定架29内平稳前后移动,方便对固定架29内废弃物中的小块钢筋进行快速吸附,同时插板334可对废弃物进行有效
阻挡,同时在定位架333的辅助下,方便电磁铁332吸附的小块钢筋可自主下落至集料箱335内,方便对钢筋进行回收再利用。
50.本发明中,隔离网26顶部一侧通过活动座转动连接有第一电动推杆34且第一电动推杆34的活塞杆通过活动座转动装设在限位板32的底部,第一电动推杆34可带动限位板32以旋转轴31为中心进行转动,方便对固定架29的底部进行开合,便于将经过除去钢筋之后的废弃物快速进行快速排出收集,使设备更加智能化。
51.本发明中,筛网287顶部的一侧贴合有隔板41,固定框284的一侧通过固定座固定连接有第二电动推杆40,第二电动推杆40的活塞杆贯穿至固定框284内并固定连接在隔板41上,隔板41一侧的四周均设置有限位杆42且限位杆42的一端贯穿固定框284并固定连接有限位块,利用第二电动推杆40作为驱动源,可带动隔板41进行移动,方便解除对筛网287一侧的遮挡状态,便于对筛网287上层的大规格废弃物进行倾倒,以便对其进行打包收集,同时多组限位杆42可对隔板41进行限位,防止隔板41在移动时错位。
52.本发明中,隔离网26顶部的两侧均开设有放置槽,且放置槽内沿左右方向分别卡接有与固定框284和固定架29配合使用的第一放置架39和第二放置架43,第一放置架39和第二放置架43的正面均贯穿放置箱1并向正面延伸,第一放置架39和第二放置架43的正面均开设有凹槽,且凹槽内设置有把手,第一放置架39和第二放置架43方便对不同规格的废弃物进行分类收集,便于使用者后期对不同规格的废弃物进行使用,同时放置槽可对第一放置架39和第二放置架43进行卡接限位,凹槽和把手的设计,可方便使用者将第一放置架39和第二放置架43快速抽离。
53.本发明中,隔离网26顶部一侧的正面和背面均通过活动座转动连接有导向柱35,第一电动推杆34位于导向柱35相互靠近的一侧,导向柱35内设置有第二弹簧36,第二弹簧36的一端设置有滑座,且滑座的一侧设置有导向杆37,导向杆37的一端贯穿导向柱35并通过活动座转动装设在限位板32的底部,利用第二弹簧36的弹性回弹,可利用滑座对导向杆37的伸缩长度进行弹性控制,方便辅助第一电动推杆34对限位板32进行更好的支撑。
54.本发明中,固定架29的一侧沿前后方向设置有多组第三弹簧44,第三弹簧44的一端设置在限位板32上,钢丝绳286相互靠近的一侧设置有连接拉绳,利用第三弹簧44的弹性回弹,可对限位板32的顶部进行缓冲,避免限位板32转动速度过快而与第二放置架43碰撞,从而导致其损坏,同时可对废弃物下落时的冲击力进行缓冲,延长了限位板32的使用寿命,同时连接拉绳可对钢丝绳286进行连接,使其成为一个整体,提高了钢丝绳286之间的同步性和强度。
55.实施例二相对于实施例一的优点在于:固定架29的一侧沿前后方向设置有多组第三弹簧44,第三弹簧44的一端设置在限位板32上,钢丝绳286相互靠近的一侧设置有连接拉绳,利用第三弹簧44的弹性回弹,可对限位板32的顶部进行缓冲,避免限位板32转动速度过快而与第二放置架43碰撞,从而导致其损坏,同时可对废弃物下落时的冲击力进行缓冲,延长了限位板32的使用寿命,同时连接拉绳可对钢丝绳286进行连接,使其成为一个整体,提高了钢丝绳286之间的同步性和强度。
56.该建筑垃圾拆除分类回收机器人的工作原理:使用者预先将设备放置在需要使用的位置,随后使用者开启第一气缸5、第二气缸6和第三气缸7,在活动座的转动辅助下,对第一延伸板2、第二延伸板3和防护罩4的角度进行调节,将防护罩4调节至竖直状并贴合在需
要拆除的墙壁上,此时使用者开启高压泵17和抽气泵8,此时高压泵17利用吸水管将水箱16内的净水经由出水管传输至三通管18内,随后净水经由三通管18分别传输至通水管19和弯管20内,同时弯管20将净水经由接水软管21传送至第一输水管22内,并经由第一通水软管23传输至第二输水管24内,最后经由第二通水软管传送至喷枪25内喷出,利用高压水流对建筑物进行切割粉碎。
57.抽气泵8将固定管9内的空气抽出,利用负压产生强大吸力,类似于吸尘器,将粉碎后的建筑垃圾经由吸管15、第二管道13、第一软管12、第一管道11和连接软管10传送至固定管9内,并经由固定管9下落至固定框284内,同时通水管19可将净水引流并传输至分流器27内,最后经由喷头快速喷出,对废弃物的表面砂石和泥污进行冲洗,同时使用者开启第四气缸2812,此时在滑套282和滑杆281的滑动辅助下,第四气缸2812可带动安装架283平稳移动,从而可推动固定框284进行移动,方便带动其内部的筛网287进行左右移动,对筛网287上的废弃物进行初次筛分。
58.由于安装架283与固定框284之间是通过活动轴转动连接的,在固定框284移动时,固定长度的多组钢丝绳286会对固定框284顶部的防护网285形成拉扯力,从而可带动左右方向移动中的固定框284和筛网287向上摆动,同时上摆的固定框284会利用挡板289带动多组第一弹簧2810进行拉伸,利用第一弹簧2810的弹性回弹,便于带动固定框284快速向下复位,使固定框284和筛网287可在左右移动的同时上下移动,提高了筛网287对不同规格废弃物的分类效果,使其可一次性分类完全,在筛网287移动时,可利用底部的筛框288带动下料软管2811进行随意伸缩移动,方便小规格建筑垃圾可经由下料软管2811进入固定架29,此时使用者开启第五气缸331,此时第五气缸331可带动电磁铁332在固定架29内平稳前后移动,u型结构设计的电磁铁332可对固定架29内废弃物中的小块钢筋进行快速吸附,吸附完成之后,使用者开启第一电动推杆34,此时第一电动推杆34可带动限位板32以旋转轴31为中心进行转动,从而使限位板32脱离与斜板30接触,此时小规格建筑垃圾可经由限位板32下落至下方的第二放置架43内,同时复位后的固定框284依旧呈左侧倾斜状,此时使用者开启第二电动推杆40,则第二电动推杆40可带动隔板41左移,解除对筛网287一侧的遮挡状态,此时筛网287上层的大规格废弃物倾倒至第一放置架39内,随后使用者提拉插板334,解除对通槽的遮盖状态,使用者利用第五气缸331带动吸附钢筋之后的电磁铁332移动至集料箱335上方,同时定位架333对电磁铁332进行阻挡,随后使用者控制电磁铁332失去吸附力,使小块钢筋可自主下落至集料箱335内,从而对钢筋进行回收再利用。
59.然而,如本领域技术人员所熟知的第一气缸5、第二气缸6、第三气缸7、第四气缸2812、第一电动推杆34、第二电动推杆40、高压泵17和抽气泵8的工作原理和接线方法属于本技术领域常规手段或者公知常识,在此就不再赘述,本领域技术人员可以根据其需要或者便利进行任意的选配
60.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。