1.本实用新型涉及故障检测领域,具体涉及航空发动机试验故障检测领域。
背景技术:
2.参照图1所示,传统航空发动机100包含涡扇发动机、涡轴发动机、涡桨发动机等。航空发动机中的气流按照轴向流动方向,依次经过对气流压缩的压气机300、对气流进行加热的燃烧室200、驱动压气机的涡轮部件400以及将高温高压气流加速喷出的喷管,并经喷管喷出后进入外部环境。
3.发动机在运转过程中若吸入鸟/砂石/冰雹等外来物,进入发动机后与高速旋转的叶轮机械碰撞,可能导致叶片断裂、摩擦起火等安全事故;若出现飞溅的部件碎片,也会因被高速流动的气体带出发动机时对周围环境安全造成隐患;此外,发动机如出现漏油及着火现象,也将危及航空发动机的安全,造成严重事故。
4.同样地,在发动机地面试车实验中,上述情况也可能发生。非预期的外物吸入需严格避免,以保证发动机运转试验过程的顺利进行,同时需要有效识别故障之处,保证在试验运行期间能及时定位泄漏处,并实现快速修补。
技术实现要素:
5.本实用新型的一个目的是提供航空发动机试验故障监测系统用于监测航空发动机在试车状态下的故障,能够快速发现试车间内的异物。
6.为实现上述目的的航空发动机试验故障监测系统包括至少一个光成像组件和电子控制系统。光成像组件用于通过异常光信号识别异物并输出异物信号;电子控制系统与所述光成像组件信号连接,用于接收所述异物信号并向航空发动机传递故障处理信号。
7.在一个或多个实施例中,所述至少一个光成像组件包括进气侧光成像组件,其摄像区域设置成包括所述航空发动机的进气侧,用于接收进气异物的光信号。
8.在一个或多个实施例中,所述至少一个光成像组件包括出气侧光成像组件,其摄像区域设置成包括所述航空发动机的出气侧,用于接收排气异物的光信号。
9.在一个或多个实施例中,所述至少一个光成像组件包括外周侧光成像组件,其摄像区域设置成包括所述航空发动机的机匣外周面,用于接收滑油和燃油的光信号。
10.在一个或多个实施例中,该航空发动机试验故障监测系统还包括红外线成像组件,设置在所述航空发动机的外周侧,与所述电子控制系统信号连接,用于接收所述航空发动机发出的红外线并输出火情信号,并向所述电子控制系统传递所述火情信号。
11.在一个或多个实施例中,所述光成像组件包括图像识别模块和至少一对彼此具有角度的成像探头,所述成像探头用于获取所述异物的光信号并输出至少两个异物图像信号,所述图像识别模块根据所述至少两个异物图像信号输出异物信号,所述异物信号包括所述异物的位置参数、运动参数。
12.在一个或多个实施例中,所述异物信号还包括异物预测路径。
13.在一个或多个实施例中,所述电子控制系统包括上位机和发动机数字控制器,所述上位机用于接受所述异物信号并输出故障码,所述发动机数字控制器用于接受所述故障码并向所述航空发动机传递故障处理信号。
14.在一个或多个实施例中,所述上位机包括显示屏和预警部件,所述显示屏用于显示所述异物在试车间内的位置、运动轨迹、运动方向、运动速度、预测路径和火情位置以及漏油位置,所述预警部件用于提供报警声。
15.在一个或多个实施例中,所述电子控制系统还包括控制开关,所述控制开关用于控制所述上位机和所述发动机数字控制器的信号连接。
16.上述航空发动机试验故障监测系统能够通过光成像组件实时监测异物,因此能够快速准确地在试车过程中发现异物,大幅减少人工判故的疏忽和误判,保证试车过程的安全性;此外光成像组件传递异物信号至电子控制系统,电子控制系统能够凭借上述故障信号及时对航空发动机作出指令,避免对航空发动机产生损坏,保证运转试验的顺利进行。整个监测系统调试工作量小,对航空发动机改装也较少,适用于各类构型发动机的地面试车试验。
附图说明
17.本实用新型的上述的以及其他的特征、性质和优势将通过下面结合附图和实施例的描述而变得更加明显,其中:
18.图1是传统航空发动机示意图;
19.图2是航空发动机试验故障监测系统的一个实施例的示意图。
20.附图标记说明
21.3 进气异物
22.4 成像探头
23.5 红外线成像组件
24.6 发动机附件
25.10 光成像组件
26.11 发动机数字控制器
27.12 着火点
28.13 上位机
29.15 排气异物
30.20 异物
31.30 电子控制系统
32.100 航空发动机
33.200 燃烧室
34.300 压气机
35.400 涡轮部件
具体实施方式
36.下面结合具体实施例和附图对本实用新型作进一步说明,在以下的描述中阐述了
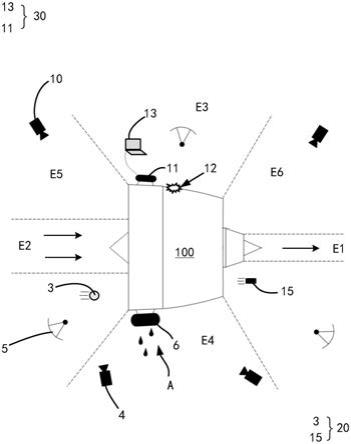
更多的细节以便于充分理解本实用新型,但是本实用新型显然能够以多种不同于此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下根据实际应用情况作类似推广、演绎,因此不应以此具体实施例的内容限制本实用新型的保护范围。需要注意的是,这些以及后续其他的附图均仅作为示例,其并非是按照等比例的条件绘制的,并且不应该以此作为对本实用新型实际要求的保护范围构成限制。
37.为检测航空发动机在试车状态下的故障,航空发动机试验故障监测系统包括至少一个光成像组件10和电子控制系统30。光成像组件10用于通过异常光信号识别异物20并输出异物信号;电子控制系统30与光成像组件10信号连接,用于接收异物信号并向航空发动机100传递故障处理信号。
38.异物20包括进气异物3和/或排气异物15。由于发动机本体内包含压气机、涡轮等高速旋转的物体,其运转过程中这些旋转部件可能因为高温、转速过高、疲劳等原因失效碎裂飞溅,飞溅的部件碎片被高速流动的气体带出发动机,成为排气异物15。及时探测进气异物3有助于发动机在试车过程中吸入从而对叶轮部件等造成影响,及时探测到排气异物15能够保护周围环境安全。
39.进一步的,在一个或多个实施例中,至少一个光成像组件10包括进气侧光成像组件,其摄像区域设置成包括航空发动机100的进气侧,用于接收进气异物3的光信号。至少一个光成像组件10包括出气侧光成像组件,其摄像区域设置成包括航空发动机100的出气侧,用于接收排气异物15的光信号。
40.参照图2所示的一个实施例所示,将试车间空间分为内涵进气区域e2、外涵进气区域e5、发动机附件区域e3、内涵排气区域e1、外涵排气区域e6。航空发动机100的进气侧包括内涵进气区域e2和外涵进气区域e5等相关位置,航空发动机100的出气侧包括内涵排气区域e1和外涵排气区域e6等相关位置。
41.例如,设置在航空发动机100的进气侧的光成像组件10能够实时监测进气侧的空间情况,若发现进气异物3,能通过电子控制系统30及时采取停车等措施,避免对航空发动机100进一步的损伤。
42.在一个实施例中,光成像组件10包括图像识别模块(图中未示出)和至少一对彼此具有角度的成像探头4,成像探头4用于获取异物20的光信号并输出至少两个异物图像信号,图像识别模块根据至少两个异物图像信号输出异物信号,异物信号包括异物20的位置参数、运动参数。
43.具体的,由于航空发动机100保持静止不动,成像探头4连续不断采集其视野范围内的可见光信号,因此如有异物20被吸入航空发动机100,或者从航空发动机100后喷出异物20,成像探头4可通与图像识别模块共同配合,凭借异常光信号识别异物20。
44.成像探头4可以选择对可见光辐射敏感、能将可见光辐射能转换为与之有一定关系的电量或化学量的光敏传感器,以接收异物光信号。外部光线透过镜头投射到成像探头4的内部感光元件表层后,感光单元进行感知并产生不同强度的模拟电流信号并被转为数字信号,实现图像采集过程,并输出具有异物的图像信号。图像识别模块可以选择市面上常见的内置图像识别程序的芯片,与成像探头4配合使用,对成像探头4获取的图像信号进行处理,并识别异物。
45.当异物20运动时,其可见光信号在视野中呈现高速运动,成像探头4以一定的频率
周期采集异物20在试车间空间中的多组图像。图像识别模块获取成像探头4的数字图像后,通过内置程序对数字图像进行后处理,以识别异物并获得异物信号,异物信号包括异物20的位置参数和运动参数等。
46.例如根据两次相邻周期记录异物20的三维绝对位置和记录的时间间隔t,可以通过图像识别模块计算出异物的运动轨迹、运动方向及运动速度等参数。异物信号还包括异物预测路径。采用具有预测功能的图像识别模块,诸如轨迹生成模块等内置程序,在获得异物的运动轨迹、运动方向及运动速度等多个运动参数后,该模块能够通过已知运动轨迹、运动方向及运动速度等参数对未来路径进行预测。诸如预测排气异物15的移动路径,避免对周围环境造成破坏。
47.在一个实施例中,一对成像探头4可以通过诸如30
°
的相对角度设置在同一装置内,并与上位机13信号连接。需要说明的是图2中仅示出成像探头4 的其中一个,另一与图示的成像探头4未被示出,但应理解到一对成像探头4 均位于图2所示位置。一对成像探头4同时连续记录异物20相对于一对成像探头4的异物图像并输出。
48.在另一个实施例中,多个光成像组件10还可包括三个成像探头4,三个成像探头4以一定角度设置,例如彼此呈30
°
角并集中装配到一个部件中。通过三个甚至更多成像探头4可以更为精确的获得异物20的多组图像信号,以计算出更为精确的位置参数和运动参数。
49.光成像组件10包括但不限于上述分布,在其它优选示例中,航空发动机试验故障监测系统还可包括多个光成像组件10,分布在航空发动机100的周围,其观测范围可以覆盖整个试车台空间,以监测更广范围。
50.发动机运转时,航空发动机100外设置发动机附件6,发动机附件6及其配套的管路中流动着滑油和燃油。滑油和燃油的封严结构数量多、构型复杂、可靠性较低,因此燃油、滑油泄漏是发动机试验中经常出现的故障,燃滑油泄漏可能导致润滑、供油系统失效或发动机起火等重大故障,需要严格避免。
51.滑油和燃油会从泄漏位置喷出,或受液体张力影响沿着发动机外壁流到外壁最低处滴落。有液体喷出或滴落的区域a,光线将发生折射,成像发生扭曲。光成像组件10还用于凭借该光线折射信号识别滑油和燃油泄漏。
52.例如将某一时刻的滑油和燃油泄漏图像与开始试验前的图像对比,可通过该光线折射信号识别出燃滑油滴落、喷出的位置,或者将某一时刻的滑油和燃油泄漏图像与前5s之前拍摄的图像对比,以识别出燃滑油滴落、喷出的位置。
53.在一个实施例中,至少一个光成像组件10包括外周侧光学成像组件,外周侧光学成像组件摄像区域设置成包括航空发动机100的机匣外周面,用于接收滑油和燃油的光信号,通过成像探头进行滑油和燃油泄漏的判断。
54.需要说明的是,光成像组件10识别光线折射信号时,通过单个成像探头4 即可实现滑油和燃油泄漏的判断。
55.光成像组件10将上述漏油信号传递给电子控制系统30,电子控制系统30 向航空发动机100传递故障处理信号。
56.具体的,光成像组件10将上述漏油信号传递给电子控制系统30,电子控制系统30控制发动机的供油系统暂停供油,以为工作人员提供抢修环境。
57.航空发动机100可能发生故障着火,该航空发动机试验故障监测系统还包括红外
线成像组件5,红外线成像组件5设置在航空发动机100的外周侧,与电子控制系统30信号连接,用于接收航空发动机100发出的红外线并输出火情信号,并向电子控制系统30传递火情信号。
58.具体的,红外线成像组件5凭借急剧增强的红外信号判断火情发生位置,并将火情信号传递给上位机13以进行故障分析。当发生火情时,着火处的红外信号急剧增强,由此红外线成像组件5可判断发生火情。
59.红外线成像组件5可以包含一个或多个红外线成像探头。在一个实施例中,每个红外线成像组件5包含两个红外成像探头,两个红外成像探头彼此按照一定角度设置,可计算识别着火点12的位置、火焰尺寸。其计算原理与上述成像探头4原理类似,这里不再赘述。
60.红外线成像组件5采集的信号传递给电子控制系统30,电子控制系统30 控制发动机的作动系统,实现发动机停车操作,为工作人员提供抢修环境。
61.在一个实施例中,电子控制系统30包括上位机13和发动机数字控制器11,上位机13用于接受异物信号并输出故障码,发动机数字控制器11用于接受故障码并向航空发动机100传递故障处理信号。
62.上位机13与光成像组件10信号连接,用于接收光成像组件10的信号并判断发生何种故障以产生故障码。例如在图像识别模块获得异物20的位置参数和运动参数后,通过无线或有线信号传递给上位机13。上位机13接受异物信号并对异物进行识别,并向发动机数字控制器11输出故障码,发动机数字控制器11用于接收上位机13的故障码并对航空发动机作出故障处理措施,诸如停车或慢车信号等。
63.上位机发出的命令传递给发动机数字控制器11后,发动机数字控制器11 根据此命令解释成相应时序信号直接控制航空发动机100。具体的,发动机数字控制器11与发动机的供油系统和可调作动机构连接,以实现发动机降转速、停车等故障处理操作,保证航空发动机100的运行安全。发动机数字控制器11 包括但不限于选择诸如plc或单片机等部件。
64.例如,红外线成像组件5采集的信号通过无线信号传递给上位机13,上位机13判断发生火情故障,并将故障码发给发动机数字控制器11,发动机数字控制器11根据故障码控制发动机的作动系统,实现发动机停车操作,为工作人员提供抢修环境。
65.在一个优选示例中,上位机13包括显示屏,用于显示所述异物在试车间内的位置参数和运动参数,诸如异物20位于试车间内的位置、运动轨迹、运动方向、运动速度、预测路径和火情位置以及漏油位置,为工作人员提供可视化参考。
66.上位机13还包括预警部件,用于在发现异物20时提供报警声,为工作人员提供警示。预警部件可以选择诸如在上位机13中具有声音播放部件的内嵌模块,在上位机13接受异物信号后即发出警示声音。
67.在一实施例中,电子控制系统30还包括控制开关,控制开关用于控制上位机13和发动机数字控制器11的信号连接。在控制开关的作用下,航空发动机试验故障监测系统包括手动模式和自动模式,以适用于不同发动机试验科目。
68.手动模式开启时控制开关切断上位机13与发动机数字控制器11的信号连接,自动模式开启时控制开关保障上位机13与发动机数字控制器11的信号连接。
69.手动模式开启时,上位机13只接收信号并告警,不向发动机数字控制器 11发送故障处理信号,上位机13的显示屏持续输出异物20在试车间内的位置、运动轨迹、运动方向及
运动速度及预测路径。在发现漏油时,上位机13的显示屏将漏油位置显示在屏幕上;在发现火情时,将火情位置显示在屏幕上,以供工作人员参考。
70.自动模式开启时,若发现异物或漏油,上位机13根据异物参数自动发送包含故障处理措施的故障码给发动机数字控制器11,发动机数字控制器11根据故障码自动控制发动机降转到慢车或者停车状态,实现发动机的自动操控。
71.在一个优选实施例中,将航空发动机周围的空间进行划区并设定危险程度分级,因此发动机数字控制器11会根据异物所处的位置为故障的危险程度分级,并根据危险等级执行相应的处理手段。
72.例如航空发动机100在运转时吸入前方空气,将空气加热、加速后排向后方,将试车间空间分为内涵进气区域e2、外涵进气区域e5、发动机附件区域 e3、内涵排气区域e1、外涵排气区域e6。
73.航空发动机100在运转时可能在内涵进气区域e2内吸入进气异物3。航空发动机100运转过程中飞溅的部件碎片在内涵排气区域e1内可能成为排气异物15。
74.在一实施例中,当在内涵进气区域e2内发现进气异物3,此区域内发现异物大概率会被吸入内涵,若检测到进气异物3的直径大于0.5cm或速度大于 50m/s,则发动机数字控制器11指令航空发动机100停车,其余情况降转至慢车停留,由现场监控人员判断后续操作。
75.在另一实施例中,外涵进气区域e5内发现异物,此区域内发现异物大概率会被吸入外涵,若检测到进气异物3的直径大于2.0cm或速度大于100m/s 则直接指令航空发动机100停车,其余情况降转至慢车停留,由现场监控人员判断后续操作。
76.在再一实施例中,内涵排气区域e1内发现排气异物15,此区域内发现异物大概率是内涵部件失效飞溅出的异物,若排气异物15的运动轨迹延长线与航空发动机10不相交,只发出警告;若排气异物15的运动轨迹延长线与航空发动机10相交,若检测到排气异物15的直径异物直径大于0.2cm且速度大于 100m/s则发动机数字控制器11指令航空发动机100停车,其余情况降转至慢车停留,由现场监控人员判断后续操作。
77.下面通过以一些实施例对航空发动机试验故障监测系统的运行过程进行介绍。
78.监测系统启动后,光成像组件10实时监测整个发动机试车区域内的异物,并通过图像识别模块发现异物。发现异物时,上位机13发出告警声音并于显示屏上显示异物的尺寸、运动轨迹和速度。
79.通过光成像组件10探测到漏油现象时,上位机13发出告警声音并将漏油位置显示在上位机13的屏幕上。
80.当红外线成像组件5检测到火情时将火情信号传递给上位机13,上位机 13发出告警声音并于显示屏上显示火情位置,上位机13发出告警并立即向发动机数字控制器传递信号,以控制发动机停车。
81.上述航空发动机试验故障监测系统只依赖一套信号采集及处理系统,能同时识别多种故障,自动判断发动机吸入及喷出异物、漏油、着火的系统,大幅减少人工判故的疏忽和误判,保证试车过程的安全性和可靠性;且故障信号采集设备均布置在发动机外围,对航空发动机改装小,系统调试工作量小。
82.本实用新型虽然以较佳实施例公开如上,但其并不是用来限定本实用新型,任何
本领域技术人员在不脱离本实用新型的精神和范围内,都可以做出可能的变动和修改。因此,凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所作的任何修改、等同变化及修饰,均落入本实用新型权利要求所界定的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。