1.本实用新型涉及传感器领域,特别是涉及一种高精度三角成像位移传感器。
背景技术:
2.激光位移传感器可以测量位移、厚度、振动、距离、直径等精密的几何测量。激光有直线度好的优良特性,同样激光位移传感器相对于我们已知的超声波传感器有更高的精度。但是,激光的产生装置相对比较复杂且体积较大,因此会对激光位移传感器的应用范围要求较苛刻。激光位移传感器分为激光三角测量法和激光回波分析法,激光三角测量法一般适用于高精度、短距离的测量,而激光回波分析法则用于远距离测量。
3.目前激光位移传感器整体结构体积较大,并且对于物体位置的测量往往存在精度不佳的特点,具有一定的缺陷。
技术实现要素:
4.本实用新型的目的在于,提供一种高精度三角成像位移传感器,以实现被测物体位置的精确测量。
5.为解决上述技术问题,本实用新型提供一种高精度三角成像位移传感器,包括:
6.壳体,用于装载位移传感器中的电路元器件;
7.激光器,用于向待测物体发射激光;
8.光束透镜,用于接收筛选所述激光器发射光线经所述待测物体表面漫反射的激光束;
9.反射镜面,用于反射传递所述光束透镜筛选的激光束至感光芯片;
10.所述感光芯片用于接收反射镜面反射传递的激光束。
11.进一步的,所述激光器向所述待测物体表面垂直发射激光。
12.进一步的,所述反射镜面位于所述光束透镜出射光线一侧,且所述反射镜面包围在所述感光芯片外侧。
13.进一步的,所述感光芯片输出端连接有数据线,且所述数据线与工控设备连接。
14.相比于现有技术,本实用新型至少具有以下有益效果:
15.本实用新型利用三角测量法原理对被测物体进行位置测量,通过感光芯片在不同角度上接收反射光线,能够高效精确地测量出被测物体的位置信息,具有结构简单、测量精确的特点。
附图说明
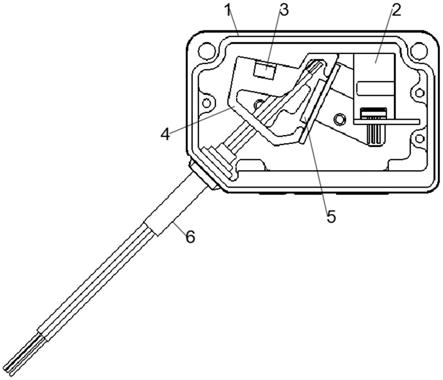
16.图1为本实用新型高精度三角成像位移传感器的整体结构示意图。
具体实施方式
17.下面将结合示意图对本实用新型的高精度三角成像位移传感器进行更详细的描
述,其中表示了本实用新型的优选实施例,应该理解本领域技术人员可以修改在此描述的本实用新型,而仍然实现本实用新型的有利效果。因此,下列描述应当被理解为对于本领域技术人员的广泛知道,而并不作为对本实用新型的限制。
18.在下列段落中参照附图以举例方式更具体地描述本实用新型。根据下面说明和权利要求书,本实用新型的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
19.如图1所示,本实用新型实施例提出了一种高精度三角成像位移传感器,包括:
20.壳体1,用于装载位移传感器中的电路元器件;
21.激光器2,用于向待测物体(未图示)发射激光;
22.光束透镜3,用于接收筛选所述激光器2发射的光线经所述待测物体表面漫反射的激光束;
23.反射镜面4,用于反射传递所述光束透镜3筛选的激光束至感光芯片5;
24.所述感光芯片5用于接收反射镜面4反射传递的激光束。
25.进一步的,在本实用新型中,所述感光芯片5能够通过光束点亮芯片的像素位置来计算分析被测物体的位置信息。
26.所述反射镜面4位于所述光束透镜3出射光线一侧,且所述反射镜面4包围在所述感光芯片5外侧。在本实施方式中,反射镜面4用于改变光路,将光束透镜3筛选后的光束反射到感光芯片5上进行分析计算,从而获取待测物体的位置信息。另外,反射镜面4包围在感光芯片5外侧,能够保证反射光线能够顺利反射至感光芯片5上。
27.特别说明的是,所述感光芯片5可采用ccd,但不限于ccd。所述激光器2将激光射向被测物体表面,经物体反射的激光通过接收,被内部的ccd线性相机接收,根据不同的距离,ccd线性相机可以在不同的角度下感知这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物体之间的距离。
28.所述激光器2例如可以是发射605nm波长的激光器,此外,还可以是其他类型波长的激光器。
29.所述感光芯片5输出端连接有数据线6,且所述数据线6与工控设备连接。在本实施方式中,数据线6将感光芯片5所采集的数据传输至工控设备,进而对待测物体的位置进行量化处理。
30.以下列举所述高精度三角成像位移传感器的较优实施例,以清楚的说明本实用新型的内容,应当明确的是,本实用新型的内容并不限制于以下实施例,其他通过本领域普通技术人员的常规技术手段的改进亦在本实用新型的思想范围之内。
31.本实用新型实施例提出了一种高精度三角成像位移传感器的使用方法,具体使用方法如下:
32.激光器2将激光射向被测物体表面,经被测物体漫反射的激光通过筛选透镜3的光束筛选后,光束经反射镜面4反射到感光芯片5上,根据不同的距离,感光芯片5可以在不同的角度下感知这个光点。根据这个角度及已知的激光和感光芯片之间的距离,信号处理后就能计算出传感器和被测物体之间的距离。最后经数据线传输到工控设备上,实现被测物体位置数据的采集。
33.综上所述,本实用新型利用三角测量法原理对被测物体进行位置测量,通过感光
芯片在不同角度上接收反射光线,能够高效精确地测量出被测物体的位置信息,具有结构简单、测量精确的特点。
34.显然,本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
技术特征:
1.一种高精度三角成像位移传感器,其特征在于,包括:壳体,用于装载位移传感器中的电路元器件;激光器,用于向待测物体发射激光;光束透镜,用于接收筛选所述激光器发射光线经所述待测物体表面漫反射的激光束;反射镜面,用于反射传递所述光束透镜筛选的激光束至感光芯片;所述感光芯片用于接收反射镜面反射传递的激光束。2.如权利要求1所述的高精度三角成像位移传感器,其特征在于,所述激光器向所述待测物体表面垂直发射激光。3.如权利要求1所述的高精度三角成像位移传感器,其特征在于,所述反射镜面位于所述光束透镜出射光线一侧,且所述反射镜面包围在所述感光芯片外侧。4.如权利要求1所述的高精度三角成像位移传感器,其特征在于,所述感光芯片输出端连接有数据线,且所述数据线与工控设备连接。
技术总结
本实用新型揭示了一种高精度三角成像位移传感器,包括:壳体,用于装载位移传感器中的电路元器件;激光器,用于向待测物体表面方向垂直发射激光;光束透镜,用于接收筛选激光器发射光线经待测物体表面漫反射的激光束;反射镜面,用于反射传递光束透镜筛选的激光束至感光芯片;所述感光芯片用于接收反射镜面反射传递的激光束,并通过光束点亮芯片的像素位置来计算分析被测物体的位置信息。本实用新型能够快速精确地对被测物体的位置进行测量,具有结构简单、测量精确的特点。构简单、测量精确的特点。构简单、测量精确的特点。
技术研发人员:纪文韬 王骏 黄保黔 黄在翔
受保护的技术使用者:江苏钜芯集成电路技术股份有限公司
技术研发日:2021.09.23
技术公布日:2022/2/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。