1.本发明涉及计量测试技术领域,具体涉及一种相对行程传感器的超高速动态校准装置。
背景技术:
2.相对行程传感器,又称拉线位移传感器,是一种高精度长度测量仪器。该传感器通过拉绳与中心轴相连接,当拉伸拉出时,传感器输出位移值。该种传感器具有测量精度高、测量范围大、接触式测量等特点,在工业领域被广泛使用。
3.目前针对相对行程传感器的精度测试都是采用静态测试的方式,而在实际工作过程中,往往是动态使用,即拉绳边拉出边读数,对被测物移动位移进行动态测量,在某些特殊场合,速度极高,拉出速度能达到十米每秒,甚至几十米每秒,在这种工况下,静态校准已经失去意义。但是,目前对于相对行程传感器缺乏动态评估,没有开展相对行程传感器动态校准工作。
4.相对行程传感器的超高速、大加速度、大位移校准对校准装置的极限速度要求高,导致校准装置设计困难的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种相对行程传感器的超高速动态校准装置,该动态校准装置可以有效地实现相对行程传感器的超高速、大加速度、大位移动态校准,并可以兼容的拉绳行程范围从几百毫米到几十米,解决了现有相对行程传感器的超高速动态校准难题,为合理的评估相对行程传感器动态精度特性提供了一种新思路。
6.本发明采用以下具体技术方案:
7.一种相对行程传感器的超高速动态校准装置,该动态校准装置包括固定平台、传感器支架、卷线机构、动滑台、激光干涉仪、直线电机、角锥棱镜以及光栅尺;
8.在所述固定平台的顶部一端固定安装有所述传感器支架,另一端固定安装有与所述传感器支架相对的所述激光干涉仪;
9.在所述传感器支架与所述激光干涉仪之间的所述固定平台顶部滑动配合有所述动滑台,所述动滑台的滑动方向与所述固定平台的长度方向一致;
10.所述直线电机和所述光栅尺固定安装于所述固定平台的顶部;
11.所述直线电机的输出端与所述动滑台固定连接,用于驱动所述动滑台在所述激光干涉仪与所述传感器支架之间滑动;
12.所述传感器支架用于固定安装待校准的相对行程传感器;
13.所述动滑台的顶部固定安装有所述卷线机构,所述卷线机构用于卷收所述相对行程传感器的拉绳且记录旋转角度;
14.在所述动滑台上安装有与所述激光干涉仪位置相对的所述角锥棱镜,所述激光干涉仪和所述角锥棱镜配合来测量所述动滑台的移动距离。
15.更进一步地,所述卷线机构包括两个导轨、导轨滑台、丝杠、丝杠电机、丝杠支架、卷线轴、锥形导向架、卷线电机及其编码器;
16.所述导轨、所述丝杠电机、所述丝杠支架以及所述锥形导向架均固定安装于所述动滑台的顶部;
17.两个所述导轨平行设置;
18.所述丝杠的一端与所述丝杠电机的输出轴传动连接,另一端能够绕自身的轴心线转动地安装于所述丝杠支架,中部与所述导轨滑台螺旋配合;
19.所述导轨滑台沿所述导轨滑动地安装于所述导轨顶部,所述导轨滑台的滑动方向、所述丝杠的轴向以及所述卷线轴的轴向均与所述固定平台的宽度方向一致;
20.所述丝杠电机用于驱动所述丝杠转动,从而带动所述导轨滑台沿所述丝杠的轴向移动;
21.所述卷线电机固定安装于所述导轨滑台的顶部,输出轴与所述卷线轴固定连接;
22.所述锥形导向架设置有穿套于所述卷线轴外周侧的中心通孔和用于对所述拉绳进行导向的导向锥面,用于使拉绳均匀地缠绕于所述卷线轴;
23.所述卷线电机的端部固定安装有编码器。
24.更进一步地,所述锥形导向架的小径端位于朝向所述卷线电机的一侧。
25.更进一步地,所述卷线电机通过电机支架安装于所述导轨滑台。
26.更进一步地,所述导轨与所述动滑台为一体结构。
27.更进一步地,所述固定平台的底部设置有多个调平支脚。
28.更进一步地,所述固定平台为大理石平台。
29.更进一步地,所述激光干涉仪通过干涉仪调整架安装于所述固定平台。
30.有益效果:
31.本发明的超高速动态校准装置包括两级加速机构,利用直线电机驱动动滑台完成对相对行程传感器的一级加速,并利用卷线机构完成对相对行程传感器的二级加速,通过两级加速机构相互配合可以有效地实现对不同长度、不同加速度、不同速度的相对行程传感器的动态校准;采用上述超高速动态校准装置有助于合理的评估相对行程传感器的动态特性,并且可以用于指导不同的动态工况选择不同动态特性的相对行程传感器。
32.因此,上述超高速动态校准装置可以有效地实现相对行程传感器的超高速、大加速度、大位移动态校准,并可以兼容的拉绳行程范围从几百毫米到几十米,解决了现有相对行程传感器的超高速动态校准难题,为合理的评估相对行程传感器动态精度特性提供了一种新思路。
附图说明
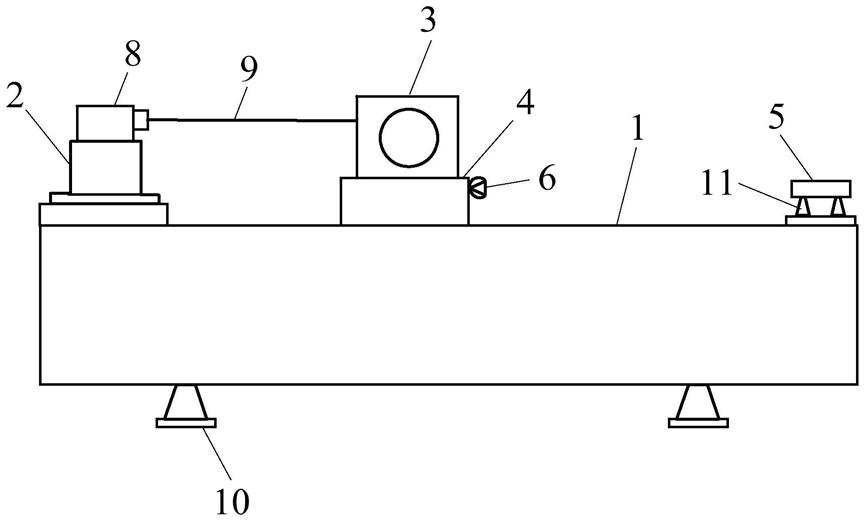
33.图1为本发明实施例提供的超高速动态校准装置的主视图;
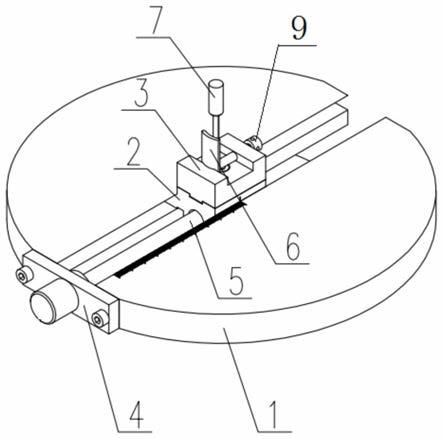
34.图2为图1中超高速动态校准装置的俯视图;
35.图3为图2中卷线机构的结构示意图;
36.图4为图3中丝杠的结构示意图。
37.其中,1-固定平台,2-传感器支架,3-卷线机构,4-动滑台,5-激光干涉仪,6-角锥棱镜,7-光栅尺,8-相对行程传感器,9-拉绳,10-调平支脚,11-干涉仪调整架,12-直线电
机,13-导轨,14-导轨滑台,15-丝杠,16-丝杠电机,17-丝杠支架,18-卷线轴,19-锥形导向架,20-卷线电机
具体实施方式
38.下面结合附图并举实施例,对本发明进行详细描述。
39.如图1和图2结构所示,本发明实施例提供了一种相对行程传感器8的超高速动态校准装置,该动态校准装置包括固定平台1、传感器支架2、卷线机构3、动滑台4、激光干涉仪5、直线电机12、角锥棱镜6以及光栅尺7;固定平台1作为整个超高速动态校准装置的安装基础;固定平台1可以为大理石平台;固定平台1的底部设置有多个调平支脚10,可以在固定平台1的底部四角分别设置有一个调平支脚10,通过调平支脚10可以对固定平台1进行调平;
40.在固定平台1的顶部一端固定安装有传感器支架2,另一端固定安装有与传感器支架2相对的激光干涉仪5,即,在固定平台1的顶部两端分别设置传感器支架2和激光干涉仪5,传感器支架2和激光干涉仪5相对设置;传感器支架2用于固定安装待校准的相对行程传感器8,相对行程传感器8为被校准对象;激光干涉仪5可以通过干涉仪调整架11安装于固定平台1,通过干涉仪调整架11能够对激光干涉仪5的位置、高度进行调节,以便激光干涉仪5能够准确测量动滑台4的位移;
41.在传感器支架2与激光干涉仪5之间的固定平台1顶部滑动配合有动滑台4,动滑台4的滑动方向与固定平台1的长度方向一致,即,如图1和图2结构所示,通过动滑台4沿横向滑动带动卷线机构3移动,从而实现动滑台4对相对行程传感器8的一级加减速,使相对行程传感器8以一定速度拉出与停止;
42.直线电机12和光栅尺7固定安装于固定平台1的顶部;直线电机12的输出端与动滑台4固定连接,用于驱动动滑台4在激光干涉仪5与传感器支架2之间滑动;直线电机12用于为动滑台4的移动提供动力,并通过光栅尺7测量直线电机12的输出位移从而实现对直线电机12的动作控制;
43.动滑台4的顶部固定安装有卷线机构3,卷线机构3用于卷收相对行程传感器8的拉绳9且记录旋转角度;卷线机构3的具体结构可以参考图3和图4,卷线机构3通过对拉绳9的卷收完成对相对行程传感器8的二级加减速,使相对行程传感器8以一定速度拉出与停止;
44.在动滑台4上安装有与激光干涉仪5位置相对的角锥棱镜6,激光干涉仪5和角锥棱镜6配合来测量动滑台4的移动距离。激光器干涉仪与动滑台4上的角锥棱镜6配合实现对动滑台4的移动距离进行测量,提供一级标准位移;同时,通过卷线机构3提供二级标准位移值。
45.上述超高速动态校准装置包括两级加速机构,利用直线电机12驱动动滑台4完成对相对行程传感器8的一级加速,并利用卷线机构3完成对相对行程传感器8的二级加速,通过两级加速机构相互配合可以有效地实现对不同长度、不同加速度、不同速度的相对行程传感器8的动态校准;采用上述超高速动态校准装置有助于合理的评估相对行程传感器8的动态特性,并且可以用于指导不同的动态工况选择不同动态特性的相对行程传感器8。
46.因此,上述超高速动态校准装置可以有效地实现相对行程传感器8的超高速、大加速度、大位移动态校准,并可以兼容的拉绳9行程范围从几百毫米到几十米,解决了现有相对行程传感器8的超高速动态校准难题,为合理的评估相对行程传感器8动态精度特性提供
了一种新思路。
47.一种具体的实施方式中,如图3结构所示,卷线机构3包括两个导轨13、导轨滑台14、丝杠15、丝杠电机16、丝杠支架17、卷线轴18、锥形导向架19、卷线电机20及其编码器;两个导轨13平行地安装于动滑台4的顶部,在动滑台4的顶部还固定安装有丝杠电机16、丝杠支架17以及锥形导向架19;导轨13与动滑台4可以为一体结构,也可以为分体结构;
48.如图4结构所示,丝杠15的一端与丝杠电机16的输出轴传动连接,另一端能够绕自身的轴心线转动地安装于丝杠支架17,中部与导轨滑台14螺旋配合;丝杠15通过丝杠电机16和丝杠支架17支承于动滑台4;
49.导轨滑台14沿导轨13滑动地安装于导轨13顶部,导轨滑台14的滑动方向、丝杠15的轴向以及卷线轴18的轴向均与固定平台1的宽度方向一致;如图3结构所示,导轨滑台14的滑动方向、丝杠15的轴向以及卷线轴18的轴向均沿纵向设置,并与动滑台4的滑动方向在水平面内垂直相交;
50.丝杠电机16用于驱动丝杠15转动,丝杠15与导轨滑台14螺旋配合,从而带动导轨滑台14沿丝杠15的轴向移动;通过导轨滑台14沿纵向方向的滑动,能够使得拉绳9均匀缠绕在卷线轴18上;
51.卷线电机20固定安装于导轨滑台14的顶部,输出轴与卷线轴18固定连接;导轨滑台14在沿导轨13移动过程中,可以带动卷线电机20和卷线轴18沿纵向移动,从而控制拉绳9在卷线轴18上的缠绕位置,实现拉绳9的均匀缠绕;卷线电机20可以通过电机支架安装于导轨滑台14;
52.锥形导向架19设置有穿套于卷线轴18外周侧的中心通孔和用于对拉绳9进行导向的导向锥面,用于使拉绳9均匀地缠绕于卷线轴18;锥形导向架19空套在卷线轴18的外周侧,并具有对拉绳9进行导向的导向锥面,使得相对行程传感器8的拉绳9经过锥形导向架19缠绕在卷线轴18上;如图3结构所示,锥形导向架19的小径端位于朝向卷线电机20的一侧;
53.卷线电机20的端部固定安装有编码器,通过编码器记录卷线轴18的旋转角度,并可以根据卷线轴18的直径、丝杠15螺距等参数准确计算得到缠绕在卷线轴18上的拉绳9长度,此长度值即为二级标准位移值。
54.采用上述动态校准装置对相对行程传感器8进行校准的过程中,将相对行程传感器8固定安装于传感器支架2上,如图1所示,拉绳9的拉出端固定于卷线机构3上,卷线机构3旋转或者动滑台4移动时,均可将相对行程传感器8的拉绳9拉出,此时记录相对行程传感器8输出位移值,而在动滑台4另一端安装有激光干涉仪5,激光干涉仪5读出动滑台4的移动位移值,作为一级标准位移值,卷线机构3的卷线电机20端固定有高精度编码器,可以准确记录卷线机构3的旋转角度,从而得到卷线机构3缠绕的拉绳9长度,此长度为二级标准位移值,一级标准位移值与二级标准位移值相加即为标准位移。通过将相对行程传感器8测量的位移值与标准位移值进行对比,从而实现对相对行程传感器8动态校准。
55.上述动态校准装置包含一级动态校准装置与二级动态校准装置;如图2所示,一级动态校准装置包括直线电机12和动滑台4,二级动态校准装置为卷线机构3;一级动态校准装置通过直线电机12驱动动滑台4移动,动滑台4带动相对行程传感器8的拉线移动,同时带动二级动态校准装置移动;一级动态校准装置以激光干涉仪5提供一级标准位移值。卷线机构3的具体结构如图3所示,卷线电机20旋转,带动卷线轴18转动,相对行程传感器8的拉绳9
经过锥形导向架19缠绕在卷线轴18上,其中,锥形导向架19固定于动滑台4不动,随着拉绳9缠绕,丝杠电机16带动导轨滑台14平移,使得拉绳9可以均匀缠绕在卷线轴18上,通过卷线电机20端部的编码器记录卷线轴18旋转角度,根据卷线轴18直径、丝杠15螺距等参数,可以准确计算得到缠绕在卷线轴18上的拉绳9长度,此长度值即为二级标准位移值。
56.上述动态校准装置通过一级动态校准装置完成一级动态校准,该部分通过直线电机12驱动,适应于中等速度、中等加速度的相对行程传感器8校准,以激光干涉仪5提供一级标准位移值;在被校传感器校准速度、加速度、位移能满足的情况下,使用一级动态校准装置,二级动态校准装置保持静止;对于长度较短、加速度较大的相对行程传感器8,二级动态校准装置优势明显,采用卷线电机20驱动卷线轴18,加速度极大,并且通过合理的设计卷线轴18直径,可以有效地适应小位移、大加速度的动态校准情况;当被校传感器加速度极大、速度极大、位移极大时,单级校准装置无法满足被校需求,需要两级动态校准装置同时工作,通过合理的分配每一级速度、加速度、位移指标,两级动态校准装置协调运动,完成对相对行程传感器8的动态校准。
57.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。