1.本发明属于数据分析技术领域,具体是指一种检测蒸压釜工艺行为的数据 分析方法。
背景技术:
2.随着人工智能技术和大数据分析技术的不断成熟,相关技术也不断被应用 于工业场景当中,以达到生产效率提升,生产质量过关,降低能耗、节约资源 的目的。在建筑建材行业,蒸压釜作为核心设备,执行工艺流程中其釜内温 度、压力及各环节蒸压时间对建材产品的质量与能耗息息相关。然而,在对工 业现场数据进行处理时,常常出现源数据丰富但信息贫瘠的现象,仍依靠工人 经验主观判断各流程的执行情况,这种人为控制整个生产流程的方式将导致不 同蒸压釜或不同批次:其生产的产品质量参差不齐,合格率无法保证;并且对 于能源消耗也出现最低消耗和最高消耗相差较大的现象。
3.为实现工艺科学化、生产质量提升与能耗节省,需要科学的方式掌控工艺 流程,而依赖人为记录数据,不确定因素多,数据准确性也无法保证,因此, 迫切需要一种检测蒸压釜工艺行为的数据分析方法,科学掌控工艺流程,从而 为节能降耗、产品质量把控提供有效的数据分析支撑与基础。
技术实现要素:
4.为了解决上述难题,本发明提供了一种将经验丰富的工人的经验数据转化 为可读的数据,并结合蒸压釜实时的压力、温度、工艺时长等数据维度建模分 析,解决了数据信息贫瘠和脏乱差的问题的检测蒸压釜工艺行为的数据分析方 法。
5.为了实现上述功能,本发明采取的技术方案如下:一种检测蒸压釜工艺行 为的数据分析方法,包括如下步骤:
6.a.数据收集:完成数据采集与周期片段切分、部分特征数据标注,在 边缘端使用视觉设备采集蒸压釜仪表数据,存入数据端再根据不 同数据特征进行读取与切分;
7.b.预处理:去除明显的噪声数据和对曲线进行平滑处理,当相邻时间 戳对应的蒸压釜压力值产生异常变化时,则让其后一条数据的压 力值覆盖前一点压力值,而当相邻时间间隔异常则舍弃其中一个 点,通过上述完成简单的去噪;
8.c.引入神经网络:确定隐藏层的神经元个数、采用的激活函数及阈 值,并以全连接的方式连接输入层、隐藏层及输出层,构建损失 函数,输入若干训练数据,并以梯度下降的方式训练x个步长, 完成神经网络的初始化和训练;
9.d.构建特征点数据模型:利用算法逻辑寻找蒸压釜工艺行为特征点;
10.e.比对分析检验:在服务端对数据实现处理的同时,绘制曲线图,包 括原始曲线图、平滑去噪后曲线图、缺失片段曲线图、特征点标 注曲线图等,客观性比对分析模型计算出的结果与实际收集到的 工人数据对模型进一步优化,改进;
11.f.生成蒸压釜行为分析报告。
12.进一步地,所述步骤a中的数据特征进行读取与切分设计了两种方式: (1)批处理:先读取完所有数据,再对这些数据切分成片段,之后对片段进 行逐条处理;(2)流处理:逐条读取数据,在读取过程中判断是否满足切分 条件,若满足则切分成片段后立即处理;之后重复判断与处理过程直至无数据 读取进来。
13.进一步地,所述步骤a中的根据数据特性切分依据为:在关键工艺流程处 设置阈值,如在关闭釜门紧接抽真空开始处指定连续十个值小于阈值y
start
,其 次寻找釜内压力值时序递增大于阈值y
max
判断升大气开始到结束,然后总时长 大于阈值y
t
,最后周期片段结束有连续十个值小于阈值y
end
。
14.进一步地,所述步骤d中的算法逻辑寻找特征点的方式为:(1)关闭釜 门,抽真空开始:数据片段的第一个点即为特征点1;(2)抽真空结束,釜倒 进开始:遍历数据片段,把小于阈值1的值都改为0,之后计算片段斜率,如 果当前点斜率等于0而后一斜率大于0且当前的值小于阈值2,则当前点为特 征点2;(3)釜倒进结束,升小气开始,特征点3:节点2到节点3时间间隔 为40分钟左右以及由于升小气快结束,斜率降低来判断;(4)升小气结束, 升大气开始,特征点4:节点3到节点4时间间隔为30-50分钟左右以及斜率 变化来判断;(5)升大气结束,特征点5:在数据片段中,对于某大于阈值5 的片段,若某个点其前些点的斜率大于0而后些点的斜率小于0,则该点为特 征点5;(6)恒温恒压补气开始,特征点6:特征点6为特征点5与特征点7 之间的最小值;(7)恒温恒压补气结束,特征点7,:在特征点5后的片段 中,若某个点其前些点的斜率大于0而后些点的斜率小于0,则该点为特征点 7;(8)排气开始,特征点8:在数据片段中找到斜率最小的点,之后向前遍 历找到大于阈值6的点,该点即为点8,其中,阈值6能够自适应的调整自身 的值为曲线斜率趋向于平滑的最小值;(9)釜倒进开始,上一釜倒进,特征 点9:节点9的时间为上一釜节点2的时间,以此来判断;(10)釜倒进结 束,上一釜倒进,特征点10:特征点10的压力与上一釜节点3的压力值相 同,找到压力值相同的点,时间最大的点即特征点10;(11)排气结束,特征 点11:数据片段的最后一个点即为特征点11。
15.进一步地,所述步骤b中的对曲线进行平滑处理是使用savitzky-golay滤 波器对数据片段进行平滑处理。
16.进一步地,所述步骤c中的神经网络的拟合功能对缺失的部分进行填补。
17.进一步地,所述步骤c中的神经网络的预测功能先行判断特征点的大致位 置,再利用上面提出的特征值方法在该位置区间内对相应的特征点进行寻找。
18.进一步地,所述步骤c中的神经网络拟合出的数据曲线与当前读取的数据 曲线进行相似性判断,以验证结果可靠性,如果两曲线的相似度小于某个阈 值,则可能读取到的数据含有较大的噪声,此时需要追溯到数据源的采集过程 来进一步分析。
19.本发明采取上述结构取得有益效果如下:本发明提供的一种检测蒸压釜工 艺行为的数据分析方法,在特征点模型基础上引入神经网络,解决缺失数据、 辅助寻找特征点以及相似性判断:利用神经网络拟合功能,规避数据采集受光 照、人为遮挡等因素影响导致片段缺失不可用情况;利用神经网络的预测功能 先行判断特征点的大致位置,再利用上面提出的特征值方法在该位置区间内对 相应的特征点进行寻找,以此来提高模型的效率与精确度;根据神经网络拟合 出的数据曲线与当前读取的数据曲线进行相似性判断确定噪声数据,以便进一 步处理分析。在对数据处理的同时,在算法中集成数据缺失和噪声异
常数据的 收集功能,绘制全过程曲线以便客观性比对分析。缓存实时数据,避免程序跑 飞或宕机缺少一部分数据而造成周期数据片段丢失。
附图说明
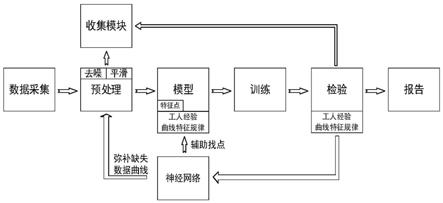
20.图1为本发明一种检测蒸压釜工艺行为的数据分析方法的流程图;
21.图2为本发明一种检测蒸压釜工艺行为的数据分析方法的特征点曲线图。
具体实施方式
22.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描 述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实 施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实 施例,都属于本发明保护的范围。
23.实施例1
24.本发明一种检测蒸压釜工艺行为的数据分析方法,包括如下步骤:
25.a.数据收集:完成数据采集与周期片段切分、部分特征数据标注。在 边缘端使用视觉设备采集蒸压釜仪表数据,存入数据端再根据不 同数据特征进行读取与切分;
26.b.预处理:去除明显的噪声数据和对曲线进行平滑处理,当相邻时间 戳对应的蒸压釜压力值产生异常变化时,则让其后一条数据的压 力值覆盖前一点压力值,而当相邻时间间隔异常则舍弃其中一个 点,通过上述完成简单的去噪,使用savitzky-golay滤波器对数据 片段进行平滑处理;
27.c.引入神经网络:确定隐藏层的神经元个数、采用的激活函数及阈 值,并以全连接的方式连接输入层、隐藏层及输出层。构建损失 函数,输入若干训练数据,并以梯度下降的方式训练x个步长, 完成神经网络的初始化和训练;
28.d.构建特征点数据模型:利用算法逻辑寻找蒸压釜工艺行为特征点;
29.e.比对分析检验:在服务端对数据实现处理的同时,绘制曲线图,包 括原始曲线图、平滑去噪后曲线图、缺失片段曲线图、特征点标 注曲线图等,客观性比对分析模型计算出的结果与实际收集到的 工人数据对模型进一步优化,改进;
30.f.生成蒸压釜行为分析报告。
31.步骤a中的数据特征进行读取与切分设计了两种方式:(1)批处理:先 读取完所有数据,再对这些数据切分成片段,之后对片段进行逐条处理; (2)流处理:逐条读取数据,在读取过程中判断是否满足切分条件,若满足 则切分成片段后立即处理;之后重复判断与处理过程直至无数据读取进来,根 据数据特性切分依据为:在关键工艺流程处设置阈值,如在关闭釜门紧接抽真 空开始处指定连续十个值小于阈值y
start
,其次寻找釜内压力值时序递增大于阈 值y
max
判断升大气开始到结束,然后总时长大于阈值y
t
,最后周期片段结束有 连续十个值小于阈值y
end
。
32.步骤d中的算法逻辑寻找特征点的方式为:(1)关闭釜门,抽真空开 始:数据片段的第一个点即为特征点1;(2)抽真空结束,釜倒进开始:遍历 数据片段,把小于阈值1的值都改为0,之后计算片段斜率,如果当前点斜率 等于0而后一斜率大于0且当前的值小于阈值2,则当前点为特征点2;(3) 釜倒进结束,升小气开始,特征点3:节点2到节点3时间间隔
为40分钟左右 以及由于升小气快结束,斜率降低来判断;(4)升小气结束,升大气开始, 特征点4:节点3到节点4时间间隔为30-50分钟左右以及斜率变化来判断; (5)升大气结束,特征点5:在数据片段中,对于某大于阈值5的片段,若某 个点其前些点的斜率大于0而后些点的斜率小于0,则该点为特征点5;(6) 恒温恒压补气开始,特征点6:特征点6为特征点5与特征点7之间的最小 值;(7)恒温恒压补气结束,特征点7,:在特征点5后的片段中,若某个点 其前些点的斜率大于0而后些点的斜率小于0,则该点为特征点7;(8)排气 开始,特征点8:在数据片段中找到斜率最小的点,之后向前遍历找到大于阈 值6的点,该点即为点8,其中,阈值6能够自适应的调整自身的值为曲线斜 率趋向于平滑的最小值;(9)釜倒进开始,上一釜倒进,特征点9:节点9的 时间为上一釜节点2的时间,以此来判断;(10)釜倒进结束,上一釜倒进, 特征点10:特征点10的压力与上一釜节点3的压力值相同,找到压力值相同 的点,时间最大的点即特征点10;(11)排气结束,特征点11:数据片段的 最后一个点即为特征点11。
33.步骤c中的神经网络的拟合功能对缺失的部分进行填补,神经网络的预测 功能先行判断特征点的大致位置,再利用上面提出的特征值方法在该位置区间 内对相应的特征点进行寻找,神经网络拟合出的数据曲线与当前读取的数据曲 线进行相似性判断,以验证结果可靠性,如果两曲线的相似度小于某个阈值, 则可能读取到的数据含有较大的噪声,此时需要追溯到数据源的采集过程来进 一步分析。
34.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所 示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果 本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创 造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护 范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。