1.本发明涉及离心式空压机技术领域,具体涉及一种主动式氢燃料电池车用高速离心式空压机。
背景技术:
2.气体悬浮高速离心式空压机相对于传统的螺杆式、罗茨式或齿轮增速离心式空压机,具有清洁无油、体积小、功率密度大、效率高、噪音小、动态响应快、可靠性高、防护性能好等特点,是车用高压燃料电池发动机的理想辅助部件。
3.其中高速旋转的空压机转子的支承部件箔片气体动压轴承,更是影响空压机稳定性与寿命的关键部件。箔片气体动压轴承是通过高速旋转的转子在楔形空间内吸入气体形成支承气膜进而支承转子;其弹性箔片串联气膜可以提供一定的轴承刚度和阻尼,进而可以抵消转子负载和抑制转子振动。因为箔片气体动压轴承具有无油污染和高转速的优势,可以设计结构紧凑且高能量密度的空压机转子。
4.在极高的dn值(直径乘以转速)工况下,箔片气体动压轴承支承的空压机转子在外部激励的作用下会产生极大的次同步振动,严重时将导致轴承转子碰磨以及轴承失效;与此同时,空压机转子在工况变化时会产生变化的轴向载荷,且汽车启动停止、加减速带来的冲击会降低空压机的稳定性,上述缺陷严重削弱了高速离心式空压机的效率和寿命。
5.传统的解决方案主要分为对箔片气体动压轴承弹性结构的创新和支承气膜形状的改变。然而,这些方案在抑制次同步振动的同时引入了轴承结构尺寸精度差和起停磨损加剧等附加问题,且上述
ꢀ“
被动”轴承无法针对空压机工况主动调整轴承性能,其应用的工况受到既定的轴承结构限制。
6.压电陶瓷致动器(pzt)在施加控制电压后通过逆压电效应产生变形和驱动力,金属丝网块过盈配合后会因为内部众多干摩擦节点的库伦摩擦产生刚度和阻尼,通过巧妙地结构设计将两者与箔片气体动压轴承结合,实现施加控制电压后自适应控制轴承的径向预载,进而改变轴承的刚度阻尼特性,最终实现空压机转子的振动控制。
技术实现要素:
7.本发明的目的在于克服上述现有的技术不足,通过主动式箔片-金属丝网块气体动压轴承/箔片气体动压轴承在径向/轴向上支承转子,由高速电机定子/转子直接驱动转子转动,由高效叶轮压缩空气做功。该空压机与普通离心式空压机相比,它具有无油润滑,摩擦损耗小,转速高,能量密度大和效率高等优点。该空压机与现有氢燃料电池车用高速离心式空压机相比,它具有转子振动实时主动可控的优点,能确保空压机高速稳定运转的同时提升空压机的整机效率。该主动式氢燃料电池车用高速离心式空压机能显著提升氢燃料电池车用空压机的稳定性和寿命,具有广阔的应用前景。
8.为了达到上述目的,本发明采用以下技术方案:一种主动式氢燃料电池车用高速离心式空压机,包括高速电机、叶轮、箔片-金属
丝网块气体动压轴承、推力箔片气体动压轴承、电涡流位移传感器、控制系统和空压机壳体;所述高速电机的定子、箔片-金属丝网块气体动压轴承及推力箔片气体动压轴承同轴安装在空压机壳体内,高速电机的转子装配在空压机转子上,用于驱动空压机转子转动;所述叶轮安装在空压机转子上,空压机转子通过箔片-金属丝网块气体动压轴承支承,空压机转子上设有推力盘,推力盘与推力箔片气体动压轴承配合;所述电涡流位移传感器安装在在空压机壳体上,电涡流位移传感器的探头靠近空压机转子,控制系统的输入端子与电涡流位移传感器电连接,控制系统的输出端子与箔片-金属丝网块气体动压轴承的致动器电连接。
9.进一步的,空压机转子与高速电机转子为一体结构。
10.进一步的,所述高效叶轮通过螺栓固定安装在空压机转子上。
11.进一步的,所述径向主动式箔片-金属丝网块气体动压轴承包括顶箔、波箔、压电陶瓷致动器、金属丝网块、刚性杠杆、钢球、弹簧、螺钉和轴承套;所述的轴承套上设有多个致动器安装槽,多个致动器安装槽沿圆周方向均匀布置;致动器安装槽与轴承套的中心孔连通;每个致动器安装槽内均安装两压电陶瓷致动器、金属丝网块及刚性杠杆,刚性杠杆呈z形,刚性杠杆的一端通过柔性铰链安装在致动器安装槽底部,金属丝网块安装在两压电陶瓷致动器之间,金属丝网块位于刚性杠杆外侧,金属丝网块的一端与刚性杠杆连接致动器安装槽端接触,并垂直于刚性杠杆连接致动器安装槽端;轴承套上对应于每个致动器安装槽分别设有若干螺纹孔,螺纹孔与相对应的致动器安装槽内的压电陶瓷致动器分别位于刚性杠杆两侧,且螺纹孔的轴线与相对应的致动器安装槽内的压电陶瓷致动器轴线平行;螺纹孔内安装有螺钉、弹簧和钢球,弹簧一端与螺钉接触,另一端与钢球接触,钢球与相对应的致动器安装槽内的刚性杠杆接触;所述的顶箔、波箔为弧形,顶箔、波箔的两端焊接在轴承套的中心孔内,顶箔位于波箔内侧;刚性杠杆的另一端的端面为弧形面,与波箔接触。
12.进一步的,所述推力箔片气体动压轴承包括多个顶箔、多个波箔和推力轴承底板,顶箔和波箔为扇形,波箔和顶箔通过点焊的方式固定在推力轴承底板上,多个顶箔同轴且沿圆周方向均匀布置,波箔位于相对应顶箔和推力轴承底板之间。
13.本发明所采用的技术方案具有以下有益效果:本发明能在车载工况变化时通过采集的空压机转子实时振动数据调整输出的控制电压,实现转子振动的自适应控制,确保空压机转子的稳定高效运转。本发明的空压机转子采用推力箔片气体动压轴承支承的方式轴向定位,搭建的主动式氢燃料电池车用高速离心式空压机具有清洁无油、体积小、功率密度大、效率高、噪音小、动态响应快、可靠性高、防护性能好等优点。本发明的空压机转子采用箔片-金属丝网块气体动压轴承支承,通过引入压电陶瓷致动器(pzt)和金属丝网块,控制pzt的控制电压实现轴承刚度和阻尼特性的改变。当车载工况变化时,本发明可以通过传感器监测转子实时振动情况作为信号输入至空压机转子-轴承测试与控制系统,通过设计的闭环反馈控制算法输出适当的控制电压获得合适的轴承刚度阻尼特性,在维持空压机转子运转的稳定性的同时确保空压机整机运行的高效率。
附图说明
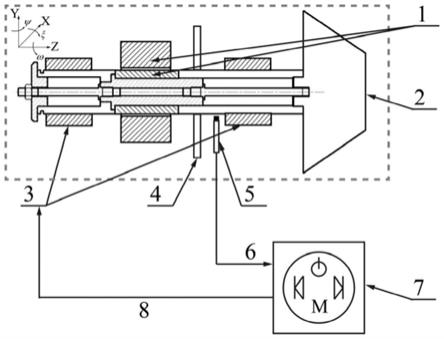
14.图1为本发明整体结构示意图。
15.图2为本发明的箔片-金属丝网块气体动压轴承剖视图。
16.图3是本发明的箔片-金属丝网块气体动压轴承爆炸图。
17.图4是图2中i处放大图。
18.图5是本发明的箔片-金属丝网块气体动压轴承的轴承套的主视图。
19.图6是图5中a-a剖视图。
20.图7为本发明推力箔片气体动压轴承俯视图。
21.图8为本发明推力箔片气体动压轴承侧视图局部放大图。
22.图9为本发明振动自适应控制闭环示意图;图9(a)为箔片-金属丝网块气体动压轴承施加的控制电压与空压机实际的工况的对应关系图;图9(b)为控制系统的控制原理图。
具体实施方式
23.下面结合附图对本发明作进一步的说明。
24.如图1所示,本发明包括高速电机1、叶轮2、2个箔片-金属丝网块气体动压轴承3、推力箔片气体动压轴承4、推力盘19、电涡流位移传感器5、控制系统7和空压机壳体。所述高速电机1的定子、2个箔片-金属丝网块气体动压轴承及推力箔片气体动压轴承同轴安装在空压机壳体内,高速电机1的转子与空压机转子为一体结构,高速电机1用于驱动空压机转子转动。叶轮2通过螺栓固定在空压机转子上,推力盘19通过过盈配合固定在空压机转子上,跟随高速转动的空压机转子旋转并压缩空气做功。空压机转子通过两个箔片-金属丝网块气体动压轴承3支承,空压机转子上的推力盘与推力箔片气体动压轴承4配合,实现空压机转子轴向限位。所述电涡流位移传感器5安装在在空压机壳体上,电涡流位移传感器5靠近箔片-金属丝网块气体动压轴承3设置,其探头靠近空压机转子。控制系统7的输入端子与电涡流位移传感器5电连接,控制系统7的输出端子与箔片-金属丝网块气体动压轴承的致动器电连接。
25.箔片-金属丝网块气体动压轴承3与高速旋转的空压机转子形成支承气膜,沿径向支承空压机转子,同时通过轴承的刚度和阻尼作用抑制转子的横向振动。推力箔片气体动压轴承4与高速旋转的推力盘形成支承气膜沿轴向支承空压机转子,同时通过轴承的刚度和阻尼作用抑制转子的轴向振动。本发明结构紧凑,具有极高的功率密度。电涡流位移传感器5监测转子的振动信号6作为控制系统7的输入信号,通过闭环控制算法向一对径向主动式箔片-金属丝网块气体动压轴承3输出控制电压8以实现转子振动的自适应控制。
26.如图2-6所示,所述的箔片-金属丝网块气体动压轴承3包括顶箔18、波箔17、压电陶瓷致动器(pzt)10、金属丝网块11、刚性杠杆13、钢球14、弹簧15、螺钉16和轴承套9。所述的轴承套9上设有三个致动器安装槽,三个致动器安装槽沿圆周方向均匀布置;致动器安装槽与轴承套9的中心孔连通。每个致动器安装槽内均安装两压电陶瓷致动器10、金属丝网块11及刚性杠杆13,刚性杠杆13呈z形,刚性杠杆13的一端通过柔性铰链12安装在致动器安装槽底部。金属丝网块11安装在两压电陶瓷致动器10之间,两压电陶瓷致动器10平行设置,且能被刚性杠杆13挤压。金属丝网块11位于刚性杠杆13外侧,金属丝网块11的一端与刚性杠杆13连接致动器安装槽端接触,并垂直于刚性杠杆13连接致动器安装槽端,金属丝网块11伸长能够使得刚性杠杆13绕柔性铰链扭转。轴承套9上对应于每个致动器安装槽分别设有若干螺纹孔,螺纹孔与相对应的致动器安装槽内的压电陶瓷致动器10分别位于刚性杠杆13
的两侧,且螺纹孔的轴线与相对应的致动器安装槽内的金属丝网块11的轴线平行。螺纹孔内安装有螺钉16、弹簧15和钢球14,弹簧15一端与螺钉16接触,另一端与钢球14接触,钢球14与相对应的致动器安装槽内的刚性杠杆13接触,在金属丝网块11收缩时,弹簧弹力能推动刚性杠杆13复位。所述的顶箔18、波箔17为弧形,顶箔18、波箔17的点焊在轴承套的中心孔内,顶箔18位于波箔17内侧;刚性杠杆13的另一端的端面为弧形面,与波箔17接触。
27.当pzt 11接收控制电压8后,由于其逆压电效应和过盈配合的金属丝网块12共同推动刚性杠杆13形成自适应控制的径向预载,结合气体动压效应改变轴承的动态刚度和动态阻尼特性。
28.如图7-8所示,推力箔片气体动压轴承4包括多个顶箔18、多个波箔17和推力轴承底板20,顶箔18和波箔17为扇形,波箔18和顶箔17通过点焊的方式固定在推力轴承底板上,多个顶箔18同轴且沿圆周方向均匀布置,波箔17位于相对应顶箔18和推力轴承底板20之间。当空压机转子工况变化时,通过气体动压效应产生时变的轴向支承力抵消空压机的轴向载荷和抑制轴向振动。
29.如图9(a)所示,对箔片-金属丝网块气体动压轴承3施加的控制电压与空压机实际的工况具有一定的非线性对应关系,在区域a中因为控制电压过小会导致空压机运行振动过大、稳定性差,在区域b中因为控制电压过大导致空压机转子运行阻力过大、运转效率低,在区域c中,控制电压能确保空压机运行振动在一个稳定较小的区域、且此时空压机转子运行阻尼适中、运转效率较高,使我们需求的目标控制域。如图9(b)所示,基于前述对空压机工况与控制电压的理论分析,设计对应的闭环控制算法,电涡流位移传感器5监测实时的转子的振动信号6输入控制系统7,并作为闭环控制算法的输入信号,通过算法向一对箔片-金属丝网块气体动压轴承3输出所需的控制电压8最终实现转子振动的自适应控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
