技术特征:
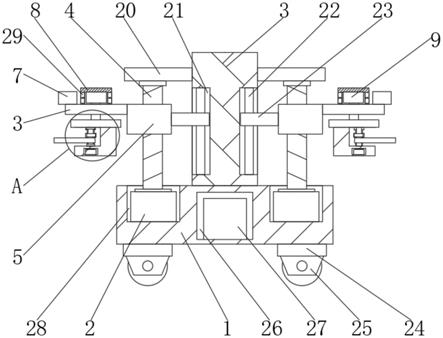
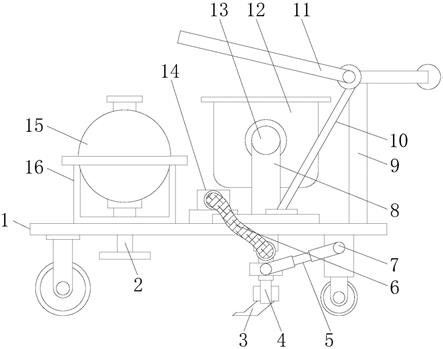
1.一种周向多工位剪切果实采摘机器人,包括横板(1),其特征在于:所述横板(1)的顶部固定连接有固定柱(2),所述横板(1)的内部设置有第一电机(3),所述第一电机(3)的顶部固定连接有螺纹杆(4),所述螺纹杆(4)的顶端延伸至横板(1)的外部,所述螺纹杆(4)的表面螺纹连接有活动块(5),所述活动块(5)的一侧固定连接有固定板(6),所述固定板(6)的顶部分别固定连接有摄像头(7)和放置箱(8),所述放置箱(8)内腔的顶部固定连接有第二电机(9),所述第二电机(9)的底部固定连接有第一转杆(10),所述第一转杆(10)的底端延伸至固定板(6)的底部并固定连接有转板(11),所述转板(11)的底部固定连接有连接板(12),所述连接板(12)的内部设置有第三电机(13),所述第三电机(13)的顶部固定连接有第二转杆(14),所述第二转杆(14)的顶端通过轴承与转板(11)的底部活动连接,所述第二转杆(14)的表面固定连接有驱动齿轮(15),所述驱动齿轮(15)的表面啮合有扇形齿轮(16),所述扇形齿轮(16)的内部固定连接有第三转杆(17),所述第三转杆(17)的顶端通过轴承与转板(11)的底部活动连接,所述第三转杆(17)的底端通过轴承与连接板(12)的表面活动连接,所述第三转杆(17)的表面固定连接有活动板(18),所述活动板(18)的一侧固定连接有刀片(19)。2.根据权利要求1所述的一种周向多工位剪切果实采摘机器人,其特征在于:所述固定柱(2)的一侧固定连接有支撑板(20),所述支撑板(20)的底部通过轴承与螺纹杆(4)的顶端活动连接。3.根据权利要求1所述的一种周向多工位剪切果实采摘机器人,其特征在于:所述固定柱(2)的内部开设有滑槽(21),所述滑槽(21)的内部固定连接有固定杆(22),所述固定杆(22)的表面活动连接有滑块(23),所述滑块(23)的一侧与活动块(5)的一侧固定连接。4.根据权利要求1所述的一种周向多工位剪切果实采摘机器人,其特征在于:所述横板(1)底部的两侧均固定连接有底板(24),所述底板(24)的底部固定连接有滑轮(25)。5.根据权利要求1所述的一种周向多工位剪切果实采摘机器人,其特征在于:所述横板(1)的内部开设有放置槽(26),所述放置槽(26)的内部固定连接有控制器(27)。6.根据权利要求1所述的一种周向多工位剪切果实采摘机器人,其特征在于:所述横板(1)的内部开设有活动槽(28),所述活动槽(28)的内部与第一电机(3)的底部固定连接。7.根据权利要求1所述的一种周向多工位剪切果实采摘机器人,其特征在于:所述放置箱(8)的内壁开设有散热孔(29),所述散热孔(29)的数量为若干个。
技术总结
本实用新型公开了机器人领域的一种周向多工位剪切果实采摘机器人,包括横板,横板的顶部固定连接有固定柱,横板的内部设置有第一电机,第一电机的顶部固定连接有螺纹杆,螺纹杆的顶端延伸至横板的外部,螺纹杆的表面螺纹连接有活动块,活动块的一侧固定连接有固定板,固定板的顶部分别固定连接有摄像头和放置箱,放置箱内腔的顶部固定连接有第二电机,第二电机的底部固定连接有第一转杆,第一转杆的底端延伸至固定板的底部并固定连接有转板,转板的底部固定连接有连接板,连接板的内部设置有第三电机。本实用新型解决了基本上都是人工完成,费时费力,且随着对农作物种植模式的要求也越来越高,投入的人工成本越来越大的问题。题。题。
技术研发人员:梁建平 王大山 王剑 张晓玲 芦天罡 王丽霞 胡伯平
受保护的技术使用者:北京市农业局信息中心
技术研发日:2021.08.24
技术公布日:2021/12/31
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。